C C A=15 =1.0 Ma.o)∠ 月20 月-15 1.0 B A1,5 6) 图6.2.1 解各交点权为: P=D,Esin245°=1.5×2.0×0.5=1.5, D=PPsin245°=1.0×2.0×0.5=1.0 P=PP sin245°=1.0x1.5×1=1.5. 由于P=P=1.5,所以,点M是AC的中点,点M的结合权为P4=P4+P=3.0, 且P=1.0,所以,F点由MF:FB=1:3确定,即F点是最或是船位 6.2.2船位误差三角形的处理 1、船位误差三角形:由于观测误差的存在,三条同时观测的船位线,不可能交于一点,而 是形成一个三角形,则把这样的三角形称为船位误差三角形. 2、反中线:在三条等精度船位误差三角形ABC上,取AB边上的中点M,则CM是AB 边的中线。作CM',满足:∠MCB=∠MCA,称CM'为AB边的反中线(如图6.2.2) C A M' B M P-1 M' 图6.2.2 图6.2.3 3、权反中线:在三条非等精度船位误差三角形ABC上,取AB边上的点M,满足 BM:AM=P:P, 称CM为AB边的权中线.作CM'使∠MCB=∠MCA,则CM'称为AB边的权反中线 (如图6.2.3) 133
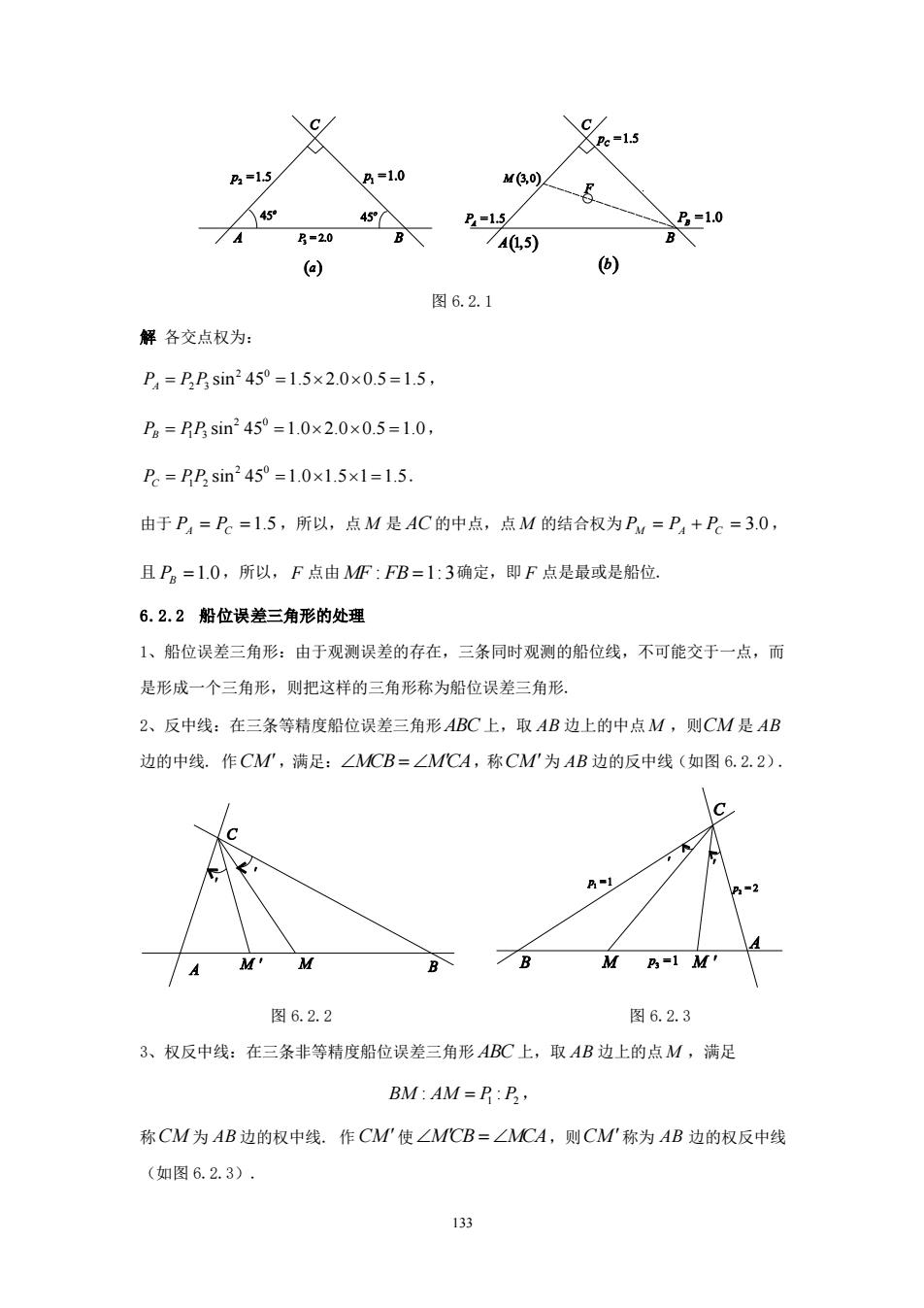
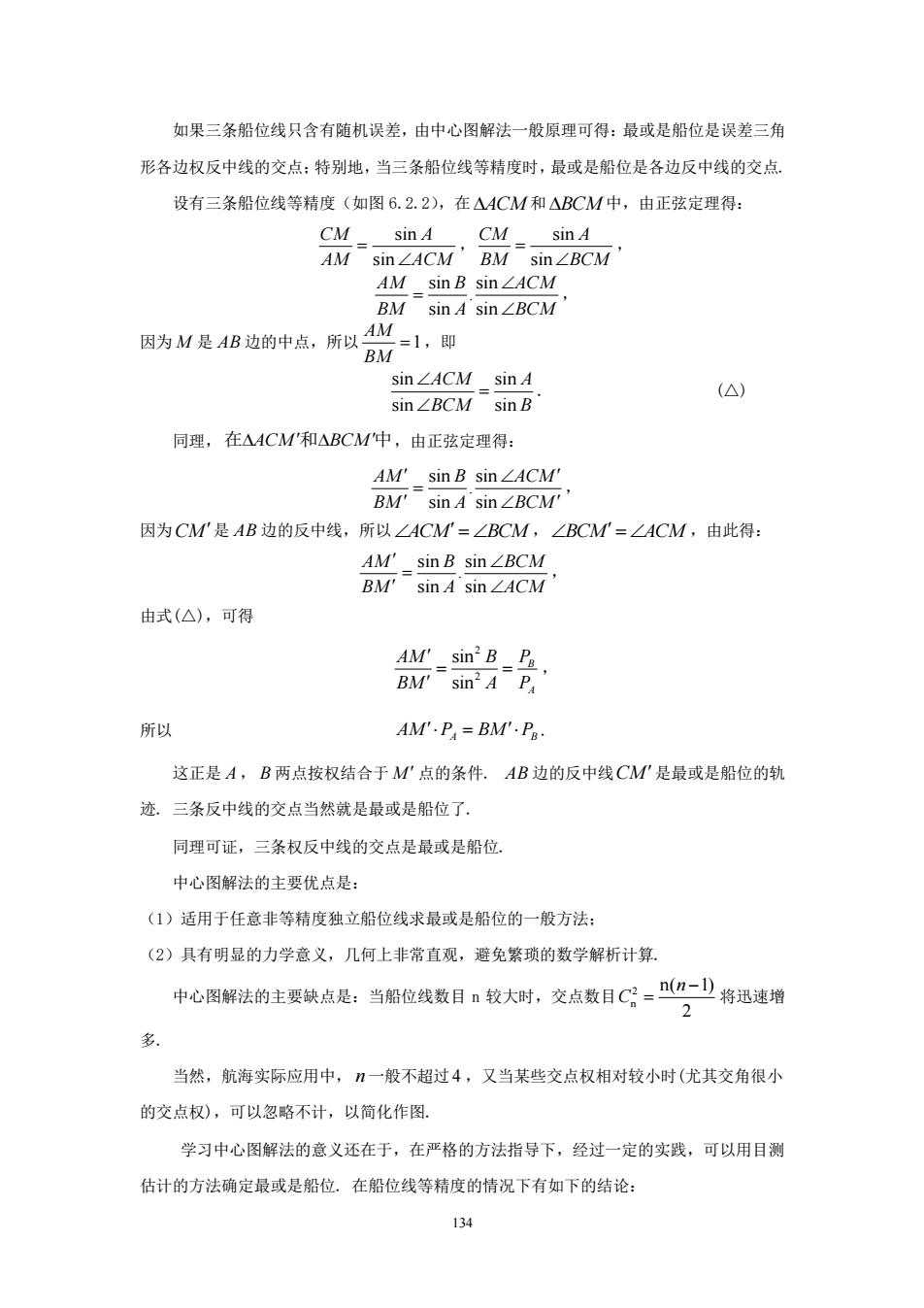
133 图 6.2.1 解 各交点权为: 2 0 2 3 sin 45 1.5 2.0 0.5 1.5 P P P A = = = , 2 0 1 3 sin 45 1.0 2.0 0.5 1.0 P PP B = = = , 2 0 1 2 sin 45 1.0 1.5 1 1.5 P PP C = = = . 由于 PA = PC =1.5 ,所以,点 M 是 AC 的中点,点 M 的结合权为 PM = PA + PC = 3.0, 且 PB =1.0 ,所以, F 点由 MF : FB =1: 3 确定,即 F 点是最或是船位. 6.2.2 船位误差三角形的处理 1、船位误差三角形:由于观测误差的存在,三条同时观测的船位线,不可能交于一点,而 是形成一个三角形,则把这样的三角形称为船位误差三角形. 2、反中线:在三条等精度船位误差三角形 ABC 上,取 AB 边上的中点 M ,则 CM 是 AB 边的中线. 作 CM ,满足: = MCB MCA ,称 CM 为 AB 边的反中线(如图 6.2.2). 图 6.2.2 图 6.2.3 3、权反中线:在三条非等精度船位误差三角形 ABC 上,取 AB 边上的点 M ,满足 1 2 BM AM P P : : = , 称 CM 为 AB 边的权中线. 作 CM 使 = MCB MCA ,则 CM 称为 AB 边的权反中线 (如图 6.2.3)
如果三条船位线只含有随机误差,由中心图解法一般原理可得:最或是船位是误差三角 形各边权反中线的交点:特别地,当三条船位线等精度时,最或是船位是各边反中线的交点。 设有三条船位线等精度(如图6.2.2),在△M4CM和△BCM中,由正弦定理得: CM sin A CM sinA AM sin∠ACM'BM=sin∠BCM' AM-sin B sin∠4CM BM sinA sin∠BCM 因为M是侣边的中点,所品,即 sin∠4CM sinA (△) sin∠BCM sin B 同理,在△4CM'和△BCM中,由正弦定理得: AM'_sin B sin.∠ACM BM'sin A'sin.∠BCM 因为CM是AB边的反中线,所以∠ACM=∠BCM,∠BCM=∠ACM,由此得: AM'_sin B sin∠BCM BM'sin A'sin∠ACM 由式(△),可得 AM'sin2B P BM sinA P. 所以 AM'.P.=BM'.Pa. 这正是A,B两点按权结合于M点的条件.AB边的反中线CM是最或是船位的轨 迹.三条反中线的交点当然就是最或是船位了. 同理可证,三条权反中线的交点是最或是船位。 中心图解法的主要优点是: (1)适用于任意非等精度独立船位线求最或是船位的一般方法: (2)具有明显的力学意义,几何上非常直观,避免繁琐的数学解析计算 中心图解法的主要缺点是:当船位线数目n较大时,交点数目C:=-将迅速增 2 多 当然,航海实际应用中,一般不超过4,又当某些交点权相对较小时(尤其交角很小 的交点权),可以忽略不计,以简化作图。 学习中心图解法的意义还在于,在严格的方法指导下,经过一定的实践,可以用目测 估计的方法确定最或是船位。在船位线等精度的情况下有如下的结论: 134
134 如果三条船位线只含有随机误差,由中心图解法一般原理可得:最或是船位是误差三角 形各边权反中线的交点;特别地,当三条船位线等精度时,最或是船位是各边反中线的交点. 设有三条船位线等精度(如图 6.2.2),在 ACM 和 BCM 中,由正弦定理得: sin sin CM A AM ACM = , sin sin CM A BM BCM = , sin sin . sin sin AM B ACM BM A BCM = , 因为 M 是 AB 边的中点,所以 1 AM BM = ,即 sin sin sin sin ACM A BCM B = . (△) 同理, 在 ACM BCM 和 中 ,由正弦定理得: sin sin . sin sin AM B ACM BM A BCM = , 因为 CM 是 AB 边的反中线,所以 = ACM BCM , = BCM ACM ,由此得: sin sin . sin sin AM B BCM BM A ACM = , 由式(△),可得 2 2 sin sin B A AM B P BM A P = = , 所以 AM P BM P A B = . 这正是 A , B 两点按权结合于 M 点的条件. AB 边的反中线 CM 是最或是船位的轨 迹. 三条反中线的交点当然就是最或是船位了. 同理可证,三条权反中线的交点是最或是船位. 中心图解法的主要优点是: (1)适用于任意非等精度独立船位线求最或是船位的一般方法; (2)具有明显的力学意义,几何上非常直观,避免繁琐的数学解析计算. 中心图解法的主要缺点是:当船位线数目 n 较大时,交点数目 2 n n( 1) 2 n C − = 将迅速增 多. 当然,航海实际应用中, n 一般不超过 4 ,又当某些交点权相对较小时(尤其交角很小 的交点权),可以忽略不计,以简化作图. 学习中心图解法的意义还在于,在严格的方法指导下,经过一定的实践,可以用目测 估计的方法确定最或是船位. 在船位线等精度的情况下有如下的结论:
(1)如果误差三角形是等边三角形,则最或是船位位于三角形中心(图6.2.4): (2)如果误差三角形是等腰三角形,则最或是船位位于三角形短边附近(图6.2.4): (3)如果误差三角形是直角三角形,则最或是船位位于直角附近(图6.2.4c)片 (4)如果误差三角形是一狭长三角形,可将最或是船位确定在短边中心处(图6.2.4) (5)特殊情况下,即在误差三角形附近有不明碍航物时,则需要将最或是船位确定在距碍 航物最近处(图6.2.4e) 图6.2.4 注:1、确定最或是船位,只作两条反中线或权反中线就可以: 2、如果船位误差三角形的边长平均小于2'~3时,可认为观测中只存在随机误差 6.3两条船位线的观测船位及其误差 当船舶驾驶员运用某种定位方法测得最或是船位之后,必须运用科学的方法对这个观测 船位进行系统地分析,以便掌握其可靠的和可能的分布情况,从而保证船舶安全迅速航行 6.3.1船位误差带和船位误差四边形 1.最或是船位 两条船位线的交点即是最或是船位(最接近真实船位的船位),该点的概率密度最大而概 率为零。真实船位离最概率船位越近,出现的概率就越大,反之,其概率就越小, 2、船位误差带 因为每条船位线均含有误差,且误差属于向量误差,即有大小和方向。航海上常用船位 误差带来描述船位线的误差,即以船位线为中心线左右±0(σ为船位线标准误差)的区域 称为船位误差带。真实船位落在一倍(士)、二倍(20)和三倍(士30)船位误差带内的概 率分别为68.3%、95.4%和99.7%.(如图6.3.1). 135
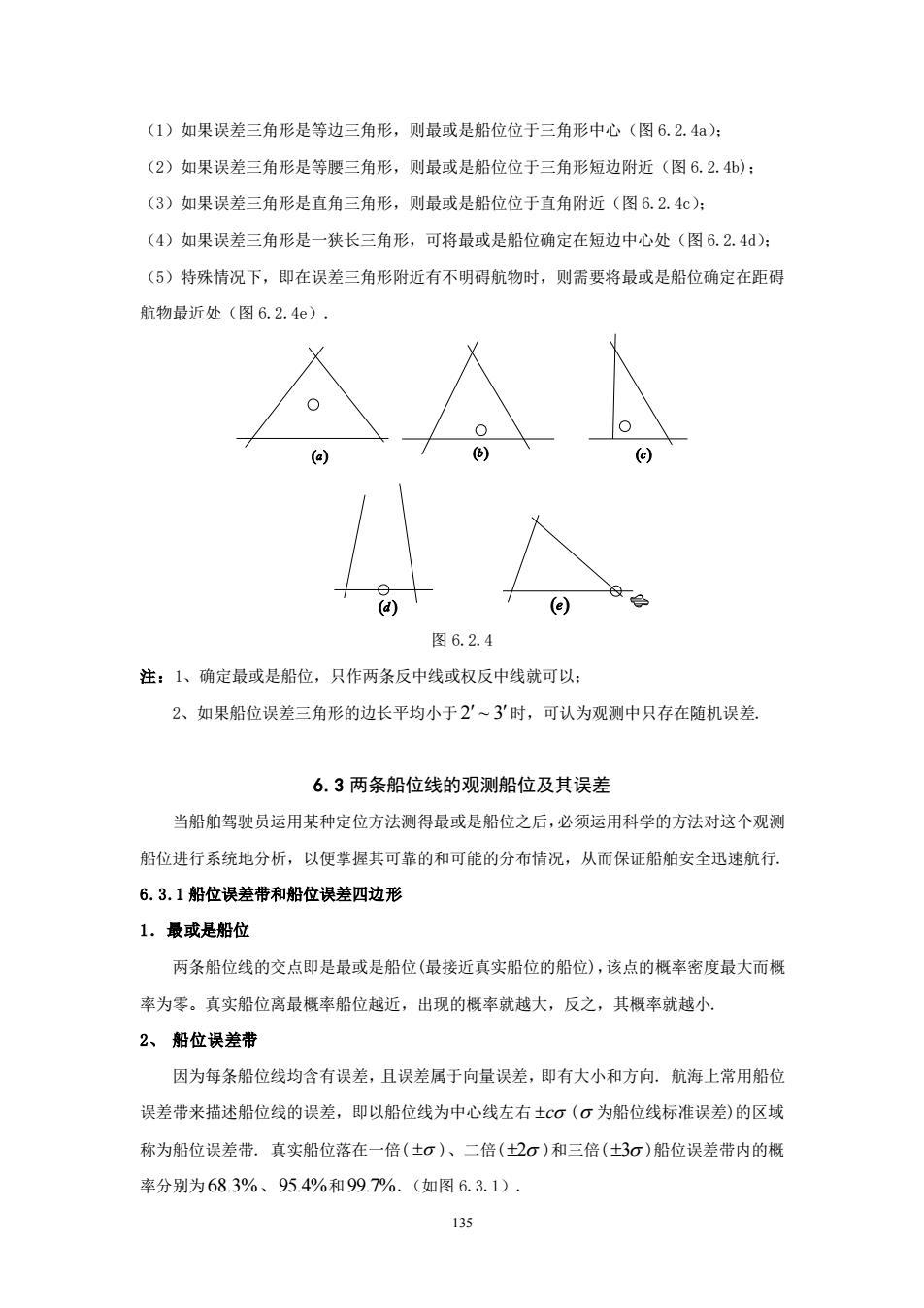
135 (1)如果误差三角形是等边三角形,则最或是船位位于三角形中心(图 6.2.4a); (2)如果误差三角形是等腰三角形,则最或是船位位于三角形短边附近(图 6.2.4b); (3)如果误差三角形是直角三角形,则最或是船位位于直角附近(图 6.2.4c); (4)如果误差三角形是一狭长三角形,可将最或是船位确定在短边中心处(图 6.2.4d); (5)特殊情况下,即在误差三角形附近有不明碍航物时,则需要将最或是船位确定在距碍 航物最近处(图 6.2.4e). 图 6.2.4 注:1、确定最或是船位,只作两条反中线或权反中线就可以; 2、如果船位误差三角形的边长平均小于 2 ~ 3 时,可认为观测中只存在随机误差. 6.3 两条船位线的观测船位及其误差 当船舶驾驶员运用某种定位方法测得最或是船位之后,必须运用科学的方法对这个观测 船位进行系统地分析,以便掌握其可靠的和可能的分布情况,从而保证船舶安全迅速航行. 6.3.1 船位误差带和船位误差四边形 1.最或是船位 两条船位线的交点即是最或是船位(最接近真实船位的船位),该点的概率密度最大而概 率为零。真实船位离最概率船位越近,出现的概率就越大,反之,其概率就越小. 2、 船位误差带 因为每条船位线均含有误差,且误差属于向量误差,即有大小和方向. 航海上常用船位 误差带来描述船位线的误差,即以船位线为中心线左右 c ( 为船位线标准误差)的区域 称为船位误差带. 真实船位落在一倍( )、二倍( 2 )和三倍( 3 )船位误差带内的概 率分别为 68.3%、95.4% 和 99.7%.(如图 6.3.1)
三倍标准误差四边形 二倍标准误差四边形 标准误差四边 图6.3.1 图6.3.2 超出三倍标准误差带的概率为0.3%,几乎不可能出现。因此,航海上常采用95%作 为船位误差界.真实船位相对于最概率船位分布的误差界可用三种几何图形来描述,它们分 别是船位误差四边形、船位误差椭圆和船位误差圆。 (1)船位误差四边形 设I、Ⅱ是两条同时观测到的船位线,其交点p是最或是船位.若I、Ⅱ分别存在的 标准差为±,、士02,则以士O,、±O分别所作船位线I、Ⅱ的平行线交成的四边形 ABCD称为船位误差四边形(如图6.3.2), 由它们的一倍、两倍、三倍标准误差带各自交成的平行四边形分别称为标准误差四边形。 二倍标准误差四边形、三倍标准误差四边形.根据概率的乘法公式,可得船位落入标准误差 四边形内的概率分别为: ±01、±02:B=68.3%×68.3%=46.6%: ±201、±202PB2=95.4%×95.4%=91.0%: ±301、±302:P=997%×99.7%=99.5% 航海上通常以三倍标准误差四边形为极限误差四边形 容易证明,标准误差四边形的面积为: 4o102 5,2sm0 其中0为1、两线的交角,O1、O,为两线的标准差。 因为船位落入标准误差四边形内的概率为定值(46.6%),所以标准误差四边形面积越 136
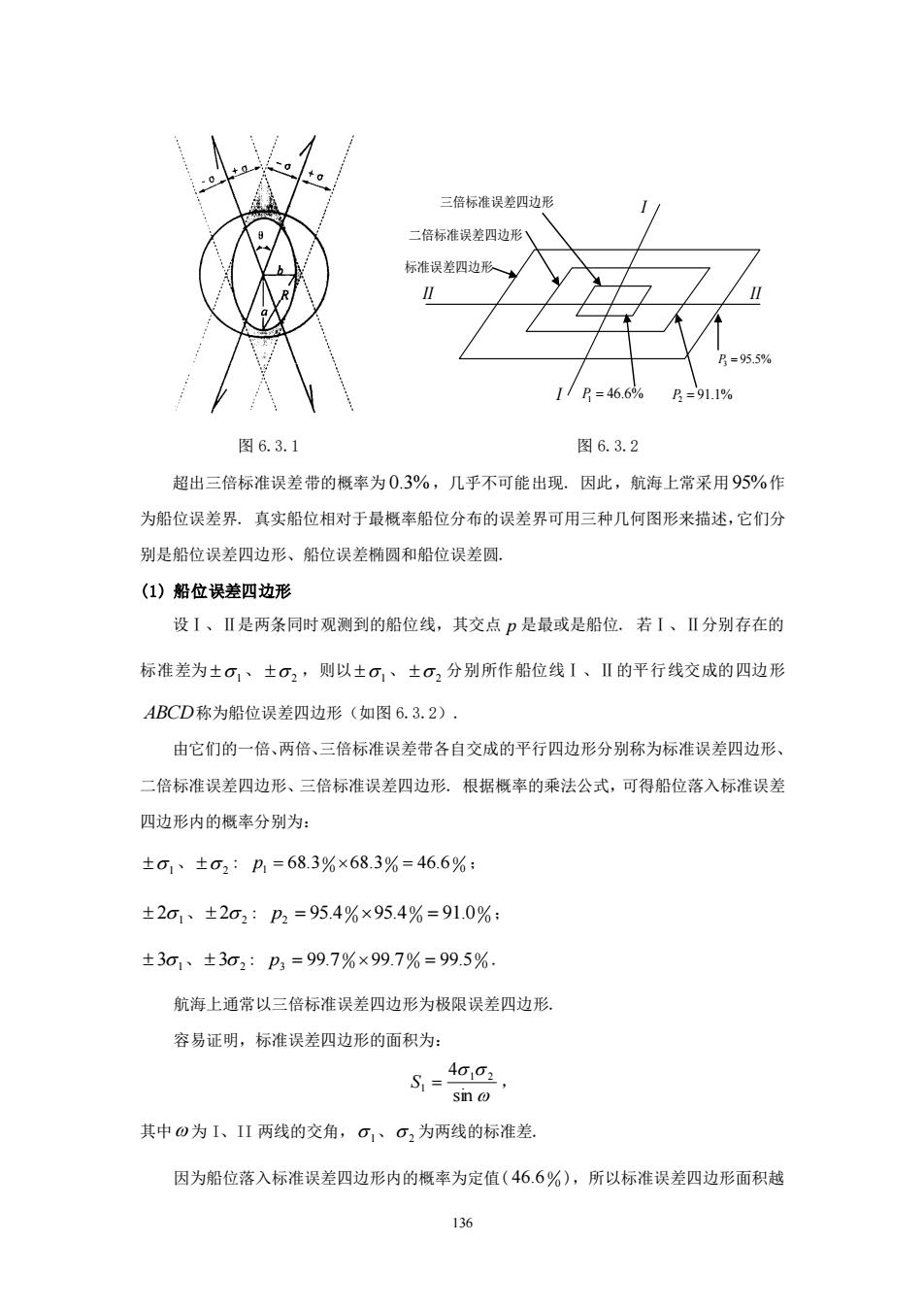
136 I 标准误差四边形 II I II 1P = 46.6% 2P = 91.1%3P = 95.5% 二倍标准误差四边形 三倍标准误差四边形 图 6.3.1 图 6.3.2 超出三倍标准误差带的概率为 0.3% ,几乎不可能出现. 因此,航海上常采用 95% 作 为船位误差界. 真实船位相对于最概率船位分布的误差界可用三种几何图形来描述,它们分 别是船位误差四边形、船位误差椭圆和船位误差圆. (1) 船位误差四边形 设Ⅰ、Ⅱ是两条同时观测到的船位线,其交点 p 是最或是船位. 若Ⅰ、Ⅱ分别存在的 标准差为 1、 2 ,则以 1 、 2 分别所作船位线Ⅰ、Ⅱ的平行线交成的四边形 ABCD 称为船位误差四边形(如图 6.3.2). 由它们的一倍、两倍、三倍标准误差带各自交成的平行四边形分别称为标准误差四边形、 二倍标准误差四边形、三倍标准误差四边形. 根据概率的乘法公式,可得船位落入标准误差 四边形内的概率分别为: 1、 2 : 1 p 0 0 0 = = 68.3 68.3 46.6 0 0 0 ; 21、 2 2 : 0 0 0 0 0 0 p2 = 95.4 95.4 = 91.0 ; 3 1、 3 2 : 0 0 0 0 0 0 p3 = 99.7 99.7 = 99.5 . 航海上通常以三倍标准误差四边形为极限误差四边形. 容易证明,标准误差四边形的面积为: sin 4 1 2 S1 = , 其中 为 I、II 两线的交角, 1、 2 为两线的标准差. 因为船位落入标准误差四边形内的概率为定值( 0 46.6 0 ),所以标准误差四边形面积越 +3 +2 + −3 −2 −
小,说明船位精度越高。其方法有:(1)减小σ,、σ,的值:(2)两线的交角越接近90越 好 6.3.2船位误差椭圆 由船位误差理论 N() 可知,船位落入最或 是船位处的概率最 0 大,而落入其它点的 概率密度,将随与最 或是船位点的距离的 B.a,Y 增大而减小。在标准 图6.3.3 差四边形周界内,将 真实船位出现的概率相等的各点连接起来,将是一个椭圆。由船位线标准差求得的椭圆,称 为船位标准误差椭圆.该椭圆内切于误差四边形,且切点为各边中点 设1、Ⅱ为两条独立的船位线,其标准误差分别为,02,两条船位线交角为0,两 位置线的交点是最或是船位.建立如图6.3.3所示的斜坐标系XOY,取I线为X轴,IⅡ 线为Y轴,观测船位点为原点.假定真船位于N点,I线的误差为4,IⅡ线的误差为D 于是真船位N的坐标位(x,y)为: Y=_D 可以推出,船位标准误差椭圆的方程为: 2 (ca)(cb=1 (6.3.1) 其中a=,b= sno sin o 当c=1时:称为一倍标准误差椭圆,船位落入的概率为:39.4%: 当c=2时:称为二倍标准误差椭圆,船位落入的概率为:86.5%: 当c=3时:称为三倍标准误差椭圆,船位落入的概率为:98.9%: 37
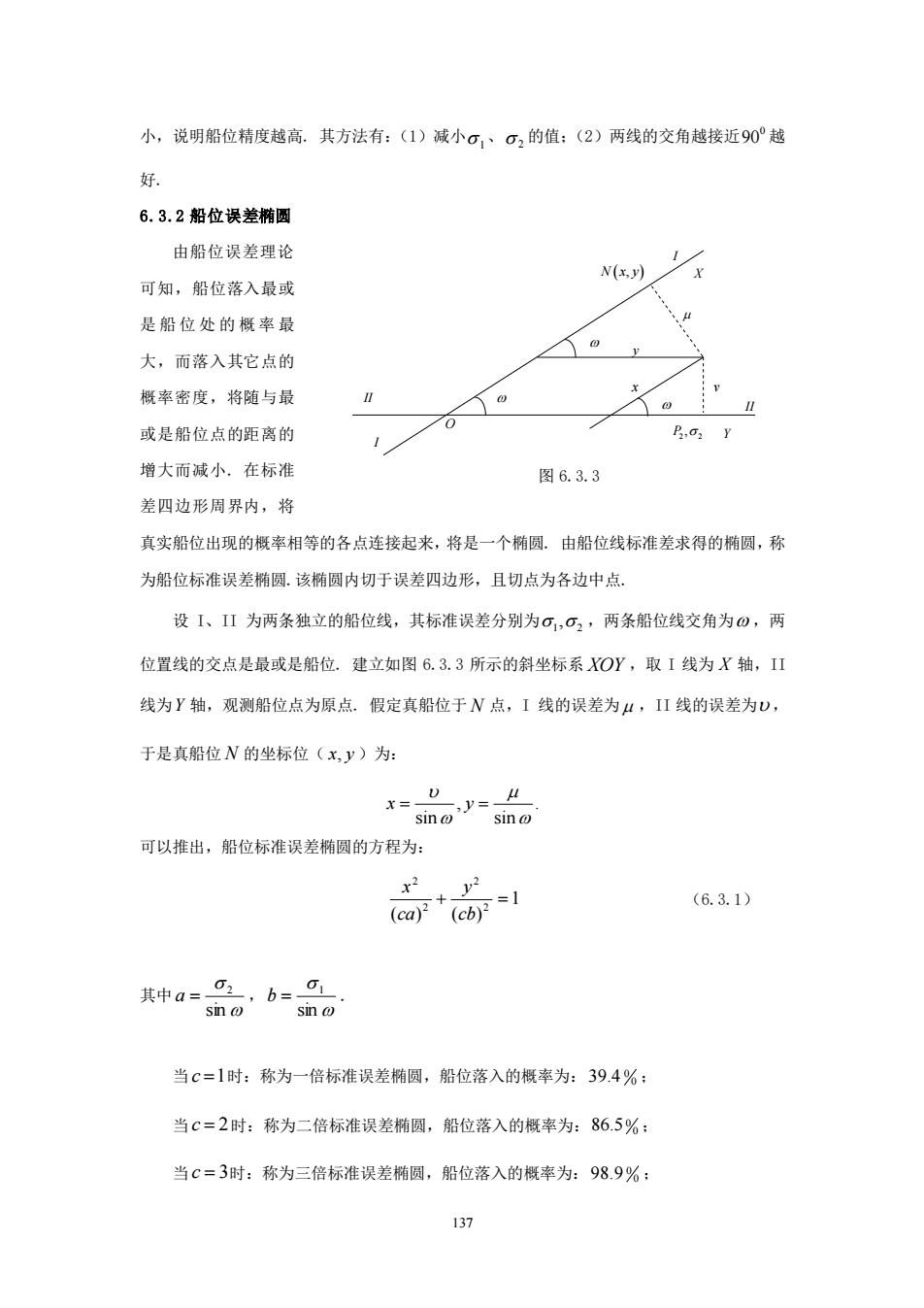
137 小,说明船位精度越高. 其方法有:(1)减小 1、 2 的值;(2)两线的交角越接近 0 90 越 好. 6.3.2 船位误差椭圆 由船位误差理论 可知,船位落入最或 是船位处的概率最 大,而落入其它点的 概率密度,将随与最 或是船位点的距离的 增大而减小. 在标准 差四边形周界内,将 真实船位出现的概率相等的各点连接起来,将是一个椭圆. 由船位线标准差求得的椭圆,称 为船位标准误差椭圆.该椭圆内切于误差四边形,且切点为各边中点. 设 I、II 为两条独立的船位线,其标准误差分别为 1 2 , ,两条船位线交角为 ,两 位置线的交点是最或是船位. 建立如图 6.3.3 所示的斜坐标系 XOY ,取 I 线为 X 轴,II 线为 Y 轴,观测船位点为原点. 假定真船位于 N 点,I 线的误差为 ,II 线的误差为 , 于是真船位 N 的坐标位( x y, )为: , . sin sin x y = = 可以推出,船位标准误差椭圆的方程为: 1 ( ) ( ) 2 2 2 2 + = cb y ca x (6.3.1) 其中 sin 2 a = , sin 1 b = . 当 c =1 时:称为一倍标准误差椭圆,船位落入的概率为: 0 39.4 0 ; 当 c = 2 时:称为二倍标准误差椭圆,船位落入的概率为: 0 86.5 0 ; 当 c = 3 时:称为三倍标准误差椭圆,船位落入的概率为: 0 98.9 0 ; III II I X Y O N x y ( , ) v 2 2 P , y x 图 6.3.3