
指令 手动 1-00-0 X Xv=X1一Xv2 a 舵机位移 舵机位移 杠杆比较 a 手 a+b X Xv2 b p a+b 比较反馈原理
- 杠杆比较 XP 手 Xi X1 X2 v x v1 x v2 x p x i x 比较反馈原理 a b a + a b b + X1 指令 b a Xi v1 x i x 舵机位移 -X2 XP v2 x a b p x XP Xi 舵机位移 XV 手动 XV =X1 -X2 v x i x p x xv = xv1 − xv2

手动 ps 比较元件要求: b 1)与指令元件相连(手) 2)与被控对象相连(舵机) 3)与放大元件相连(阀芯)》 飞机舵机 舵机位移 Xp 液压能源 扰动 X 杠杆比较 液压动力元件 a 指令 同服阀 飞机 液压缸 X a+b 舵机 b a+b 文字方框图
指令 液压动力元件 扰 动 液压缸 飞机 舵机 XV XP 伺服阀 液压能源 pS 飞机舵机 XV 文字方框图 XP Xi 比较杠杆 舵机位移 手动 a b - X 杠杆比较 i a b a + a b b + 比较元件要求: 1)与指令元件相连(手) 2)与被控对象相连(舵机) 3)与放大元件相连(阀芯)

F、工作原理及传递函数 1 44R. s+Kce) 动力元件 杠杆比较 X Ka 1 1 a+b Ap D3 25hS+1) On b a+b 液压能源 杠杆比较 液压动力元件 扰动 a 指令 伺服阀 飞机 液压缸 X a+b 舵机 b a+b 方框图
-、工作原理及传递函数 指令 液压动力元件 扰 动 液压缸 飞机 舵机 XV 伺服阀 XP 液压能源 - X 杠杆比较 i a b a + a b b + 1) 2 ( 1 2 2 + s + s s h h h v x p x FL ) 4 ( 1 2 Ce e t p s K V A + p q A K 动力元件 - 杠杆比较 Xi a b a + a b b + 方框图
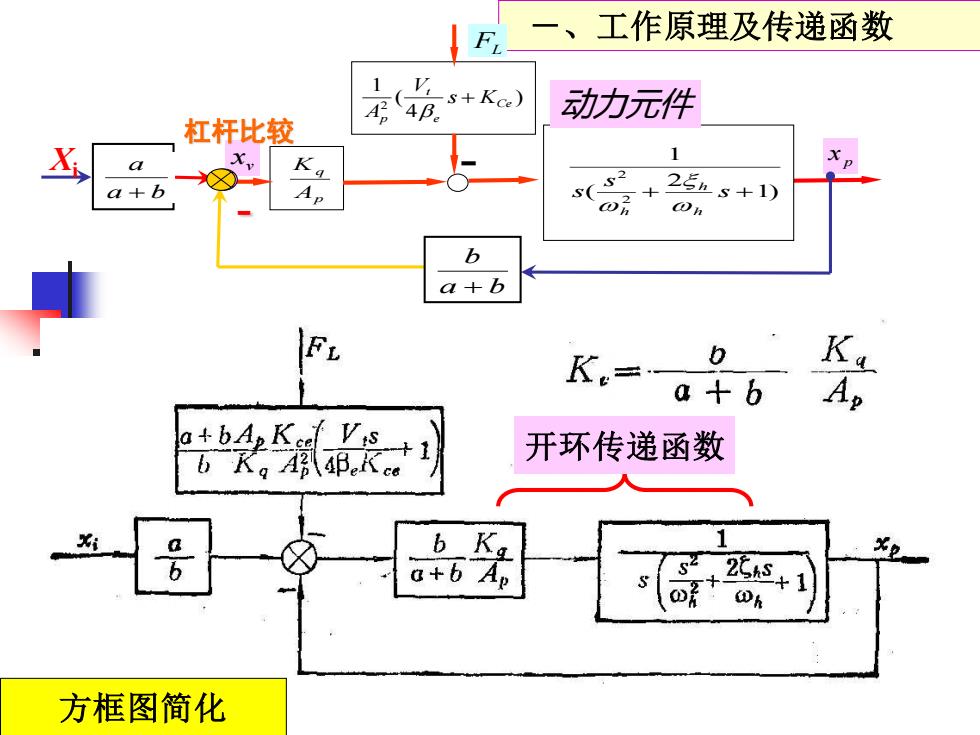
F 一、工作原理及传递函数 1 4B s+Kce) 动力元件 杠杆比较 X x, a+b Ap (2 25hs+1) ⊙h b a+b K= b a+6 Ap 开环传递函数 b Ka a+b 2s+1 方框图简化
-、工作原理及传递函数 方框图简化 1) 2 ( 1 2 2 + s + s s h h h xv x p FL ) 4 ( 1 2 Ce e t p s K V A + p q A K 动力元件 - 杠杆比较 Xi a b a + a b b + 开环传递函数

一、 工作原理及传递函数 GH- Ko 2Ci -+1 开环 传递函数 G①h K= b a +6 Ap a+bAp Keef Vis 开环传递函数 b a+b Ap S 2+1 +⊙ 传递函数
一、工作原理及传递函数 开环传递函数 开环 传递函数 传递函数