
图示平面结构,自重不计, C处为光滑铰链。已知: P=100KN,P2=50KN, 0=60°,q=50KN/m,L=4m。 试求固定端A的反力。 L 图示平面结构,自重不计。 已知:M和L,B、C为铰接。 试求固定端A的反力 M
450 P1 P2 q A B D C L L L L 图示平面结构,自重不计, C处为光滑铰链。已知: P1=100KN,P2=50KN, =600 ,q=50KN/m,L=4m。 试求固定端A的反力。 D C B A L M 图示平面结构,自重不计。 已知:M和L,B、C为铰接。 试求固定端A的反力

运动学: 一、运动学基础 ·点的运动 运动方程(直角坐标法、自然法)、速 度与加速度 ·刚体的基本运动 刚体的平动、刚体的定轴转动 二、运动的合成 ·点的合成运动 点的速度合成定理、动系为平动的加速度合成 定理及其应用
运动学: 一、运动学基础 • 点的运动 运动方程(直角坐标法、自然法)、速 度与加速度 • 刚体的基本运动 刚体的平动、刚体的定轴转动 二、运动的合成 • 点的合成运动 点的速度合成定理、动系为平动的加速度合成 定理及其应用
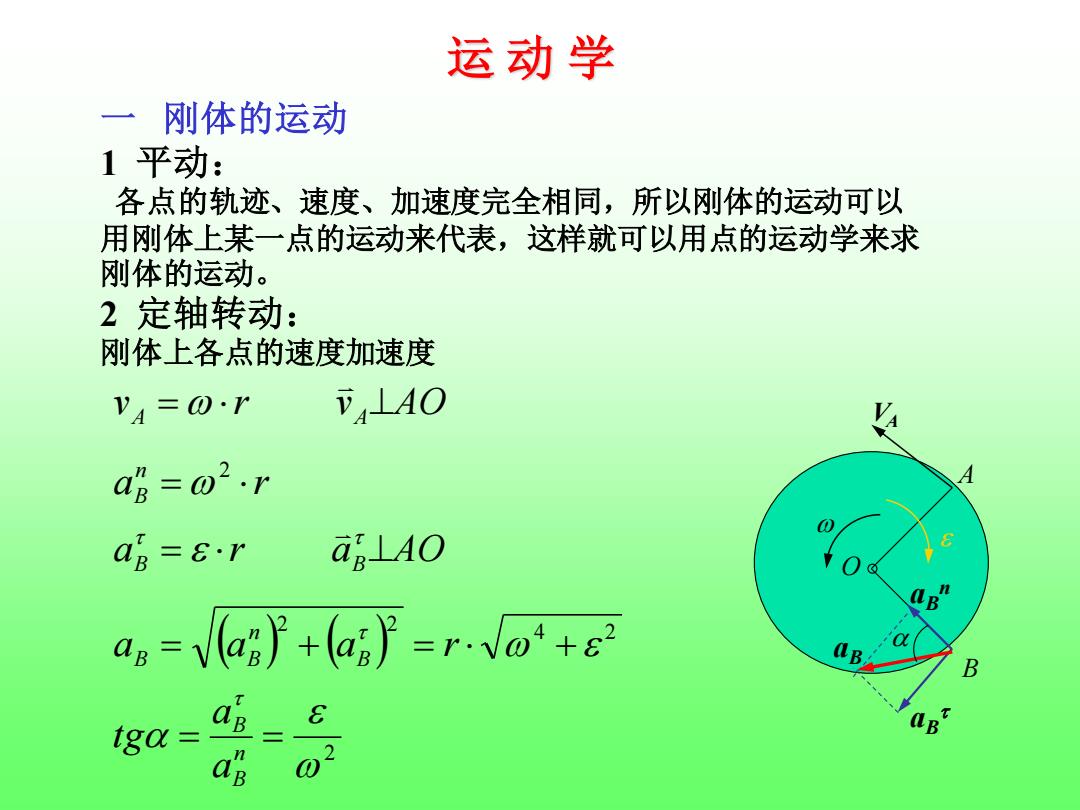
运动学 一刚体的运动 1平动: 各点的轨迹、速度、加速度完全相同,所以刚体的运动可以 用刚体上某一点的运动来代表,这样就可以用点的运动学来求 刚体的运动。 2定轴转动: 刚体上各点的速度加速度 V4=0·r VLAO ap=02.r ap=8.r a8⊥AO B ar=V(an)+(ag)=r.Vo'+E t80=
运 动 学 一 刚体的运动 1 平动: 各点的轨迹、速度、加速度完全相同,所以刚体的运动可以 用刚体上某一点的运动来代表,这样就可以用点的运动学来求 刚体的运动。 2 定轴转动: 刚体上各点的速度加速度 O VA A aB B aB n aB ( ) ( ) 2 4 2 2 2 2 = = = + = + = ⊥ = = ⊥ n B B B n B B B B n B A A a a t g a a a r a r a AO a r v r v AO

3平面运动: VA ·求速度共讲三种方法: ①基点法:是点的合成运动方法, A AB 也是最基本的方法。其概念清楚,是 后两种方法的基础。 VA B 下B=下4+下BA 下B414B VBA AB BA VA A ②投影法:求速度较方便,但求平 面图形的角速度不方便。 VB VE COS B=V coSO
3 平面运动: • 求速度共讲三种方法: 基点法:是点的合成运动方法, 也是最基本的方法。其概念清楚,是 后两种方法的基础。 AB O A B vA vA vB vBA BA v v v v v AB B A A B B A B A B A = = + ⊥ O A B vA vB 投影法:求速度较方便,但求平 面图形的角速度不方便。 vB cos = vA cos
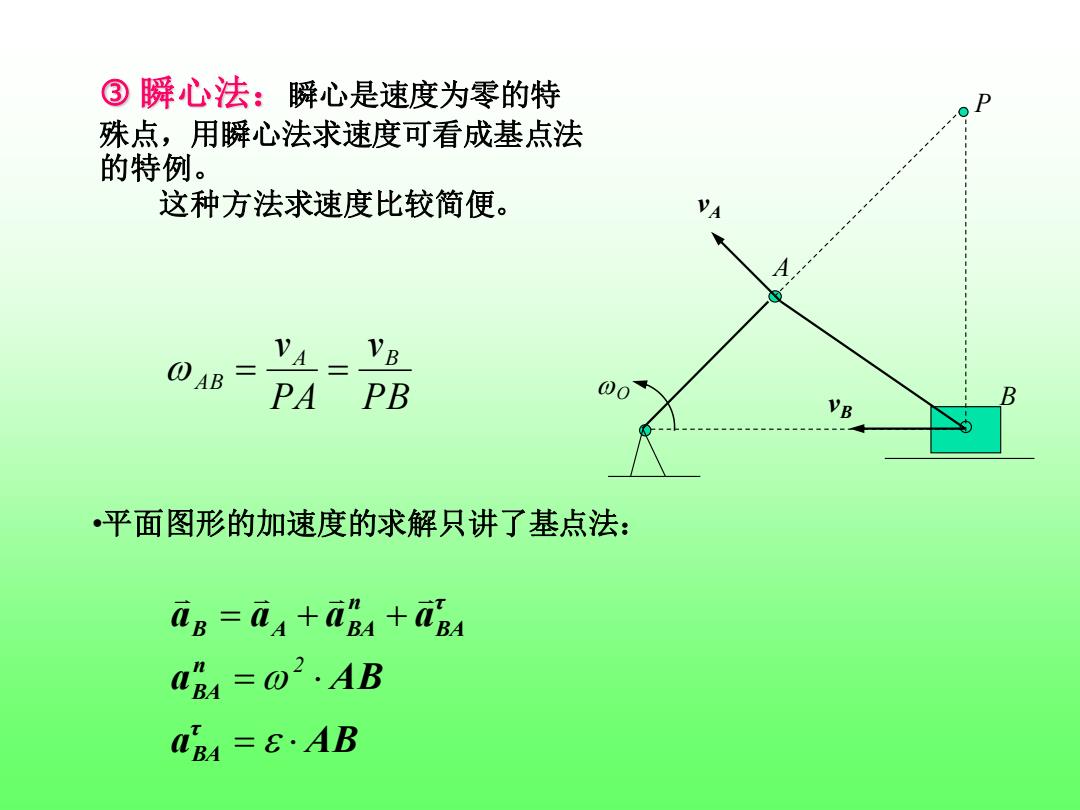
③瞬心法:瞬心是速度为零的特 殊点,用瞬心法求速度可看成基点法 的特例。 这种方法求速度比较简便。 N VB 04B= N PA PB 00 B 平面图形的加速度的求解只讲了基点法: aB aa+am aB aB =@2.AB aBM=8·AB
O A B vA vB 瞬心法:瞬心是速度为零的特 P 殊点,用瞬心法求速度可看成基点法 的特例。 这种方法求速度比较简便。 PB v PA vA B AB = = •平面图形的加速度的求解只讲了基点法: a AB a AB a a a a τ BA n BA τ BA n B A BA = = = + + 2