对称操作的矩阵表示 1.坐标变换 (4)反映对称 g反映操作G(Gn) 100 y 010 00-1 g反映操作G,(包含z轴,与o-夹角为B) D P>(x=rsinecoso,y=rsinesino,rcose) P'→x=rsin0cos(2B-p) =rsin(cos28cosp+sin28sin) =x cos28+ysin 2B cos2B sin2B 0 y=rsinesin(28-0) y=sin2B -cos28 0 =rsine(sin2B coso-cos2Bsin) 0 0 1 >6 z=2
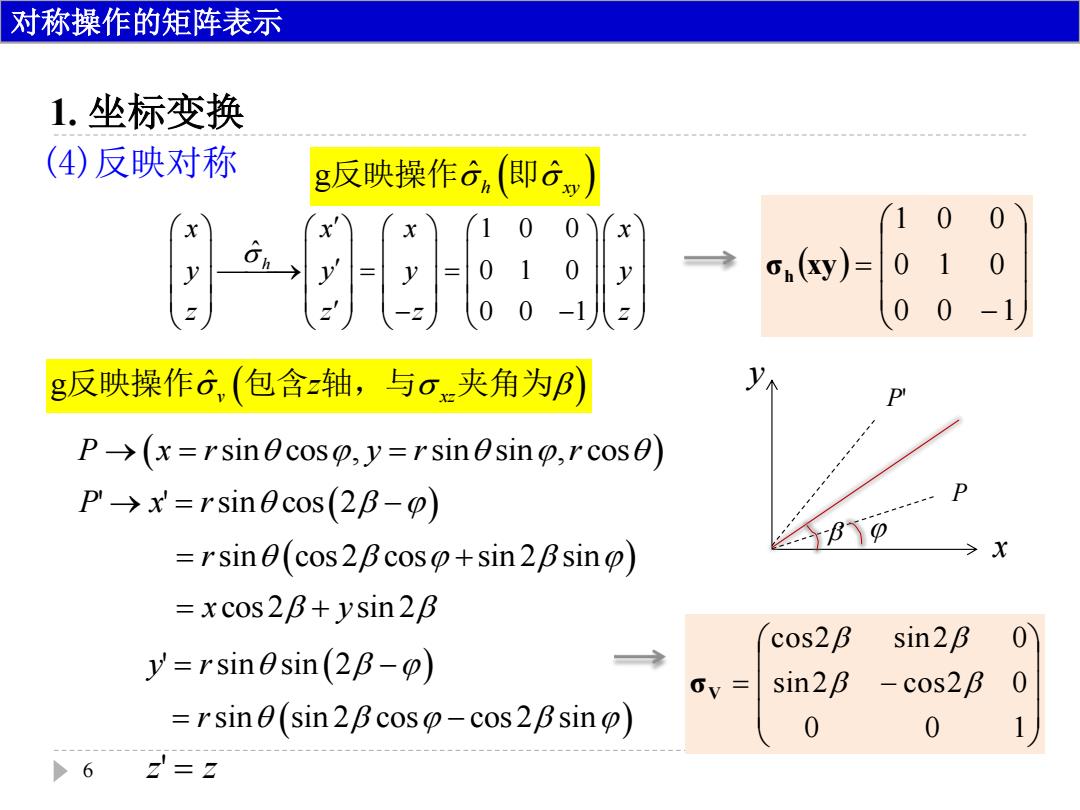
1. 坐标变换 6 对称操作的矩阵表示 g反映操作 ˆ v xz 包含z轴,与 夹角为 g反映操作 ˆ h xy 即 ˆ 1 0 0 ˆ 0 1 0 0 0 1 h x x x x y y y y z z z z 0 0 1 0 1 0 1 0 0 σh xy x y P P' P x r y r r sin cos , sin sin , cos ' ' sin cos 2 sin cos 2 cos sin 2 sin cos 2 sin 2 P x r r x y ' sin sin 2 sin sin 2 cos cos 2 sin y r r z z ' 0 0 1 sin2 cos2 0 cos2 sin2 0 σV (4)反映对称
对称操作的矩阵表示 1.坐标变换 (⑤)像转动 首先,的矩阵表示为RR2 x" =(R2) 因此,Sn=6Cn的矩阵表示为cC。 2π 2π 2π 0 2π cos -sin cos -sin 0 n n 1 0 0 n n 2π 2兀 2π 2π S(Z)=CnGn= sin- 0 01 0 sin cos 0 n n 1 0 n n 0 -1 0 0 0 0 7
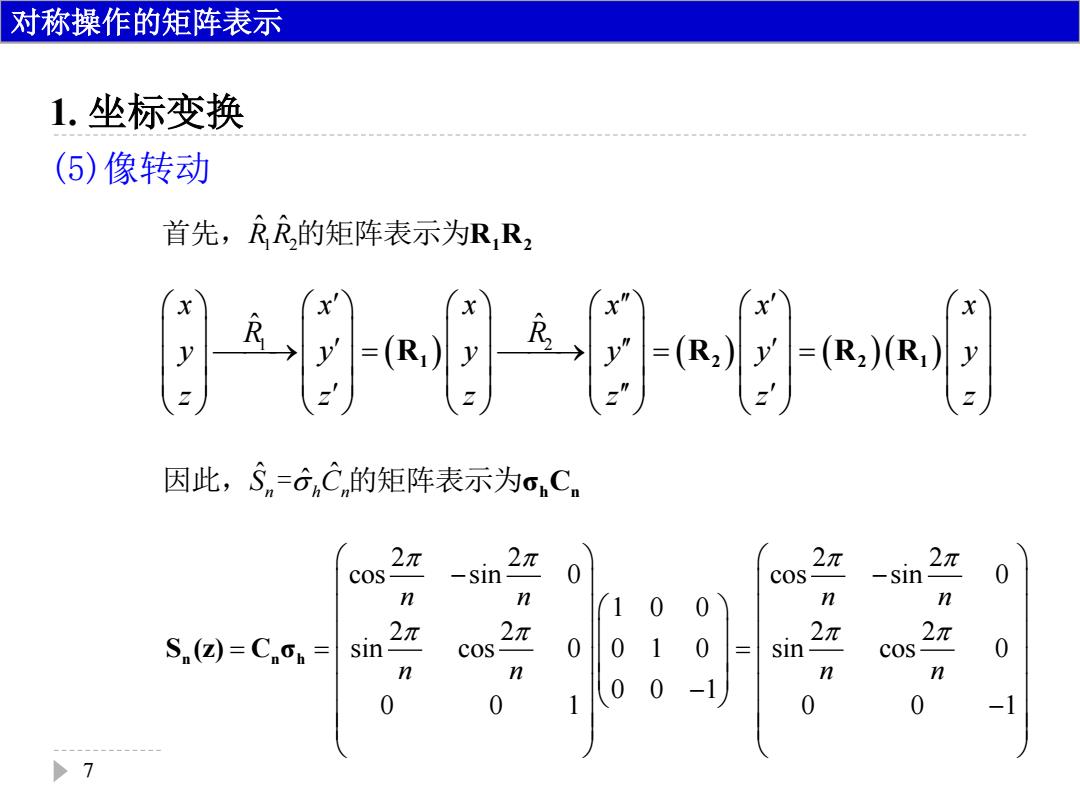
1. 坐标变换 7 对称操作的矩阵表示 1 2 R R ˆ ˆ 首先, 的矩阵表示为R R1 2 1 2 ˆ ˆ x x x x x x R R y y y y y y z z z z z z R R R R 1 2 2 1 ˆ ˆ ˆ n h n 因此,S C = 的矩阵表示为σh n C 2 2 2 2 cos sin 0 cos sin 0 1 0 0 2 2 2 2 sin cos 0 0 1 0 sin cos 0 0 0 1 0 0 1 0 0 1 n n n n n n n n S (z) C n n h σ (5)像转动