结构力学一第十一章矩阵位移法 海南大学土木建筑工程学院 11.2.3力和位移的正负号规定 (1)外荷载和支反力 ①结点荷载和支反力 结点荷载是指作用于结点上的荷载。本章约定 结点集中力和支反力均以与整体坐标系方向相同时 为正,反之为负。结点集中力偶和支座反力偶以顺 时针转向为正,反之为负。 ②非结点荷载 非结点荷载是指作用于杆件上的荷载。本章约 定非结点集中力和分布力以单元坐标系正向相同时 为正,反之为负。非结点集中力偶,仍以顺时针转 向为正,反之为负。 12
12 结构力学—第十一章 矩阵位移法 土木建筑工程学院 11.2.3 力和位移的正负号规定 (1)外荷载和支反力 ①结点荷载和支反力 结点荷载是指作用于结点上的荷载。本章约定 结点集中力和支反力均以与整体坐标系方向相同时 为正,反之为负。结点集中力偶和支座反力偶以顺 时针转向为正,反之为负。 ②非结点荷载 非结点荷载是指作用于杆件上的荷载。本章约 定非结点集中力和分布力以单元坐标系正向相同时 为正,反之为负。非结点集中力偶,仍以顺时针转 向为正,反之为负
结构力学一第十一章矩阵位移法 洛南大学士木建筑工程学院 (2)结点位移 由于矩阵位移法不再为了简化计算而忽略杆件 的轴向变形,因此,对于平面刚架中的每个刚结点 而言,有三个相互独立的位移分量:水平方向的线 位移分量U,竖直方向的线位移分量V,和结点的转 角位移分量。对于这三个分量,本章约定线位移 与整体坐标系方向一致为正,转角以顺时针转向为 正,反之为负。 (3)单元杆端力和杆端位移 单元杆端截面的内力和位移分别称为单元杆端 力和杆端位移。 下图所示为平面刚架中的单元®,其始端为, 末端为j。 13
13 结构力学—第十一章 矩阵位移法 土木建筑工程学院 (2)结点位移 由于矩阵位移法不再为了简化计算而忽略杆件 的轴向变形,因此,对于平面刚架中的每个刚结点 而言,有三个相互独立的位移分量:水平方向的线 位移分量u,竖直方向的线位移分量v,和结点的转 角位移分量q。对于这三个分量,本章约定线位移 与整体坐标系方向一致为正,转角以顺时针转向为 正,反之为负。 (3)单元杆端力和杆端位移 单元杆端截面的内力和位移分别称为单元杆端 力和杆端位移。 下图所示为平面刚架中的单元 e ,其始端为i, 末端为j
结构力学—第十一章矩阵位移法 治南大学土木建筑工程学院 f3() M(8) 不 f2(⑥ j6(8) (可) 4(可)) 了() ,() (西) (a)单元坐标系下的广义分量 (b6)单元坐标系下的分量 f3(δ3) M(0,) f6(66) 0 f2(δ2) E) M(0) f4(δ4) E,() f5(6)川 Ey(g)1 (c)整体坐标系下的广义分量 (d)整体坐标系下的分量 14
14 结构力学—第十一章 矩阵位移法 土木建筑工程学院 j v j i e Nj F ( uj ) ( ) FQj Mj j ( ) ) ( i i u FN FQi vi ( ) ( ) Mi i x i e j y j i x ( ) Mj j F ( uj ) xj Fyj ( vj ) ( ) i F v yi Fxi ui ( ) Mi i ( ) O y e ( f 1 1 ) f 5 ) 5 ( f 3 ) 3 ( f 6 ) 6 f ( 2 2 ( ) y x ( f 4 4 ) O x y i j ( f 1 ) 1 ( ) f 2 2 ( ) f 3 3 4 4 f ( ) 5 5 f ( ) f 6 6 ( ) (a) 单元坐标系下的广义分量 (c) 整体坐标系下的广义分量 e (b) 单元坐标系下的分量 (d) 整体坐标系下的分量
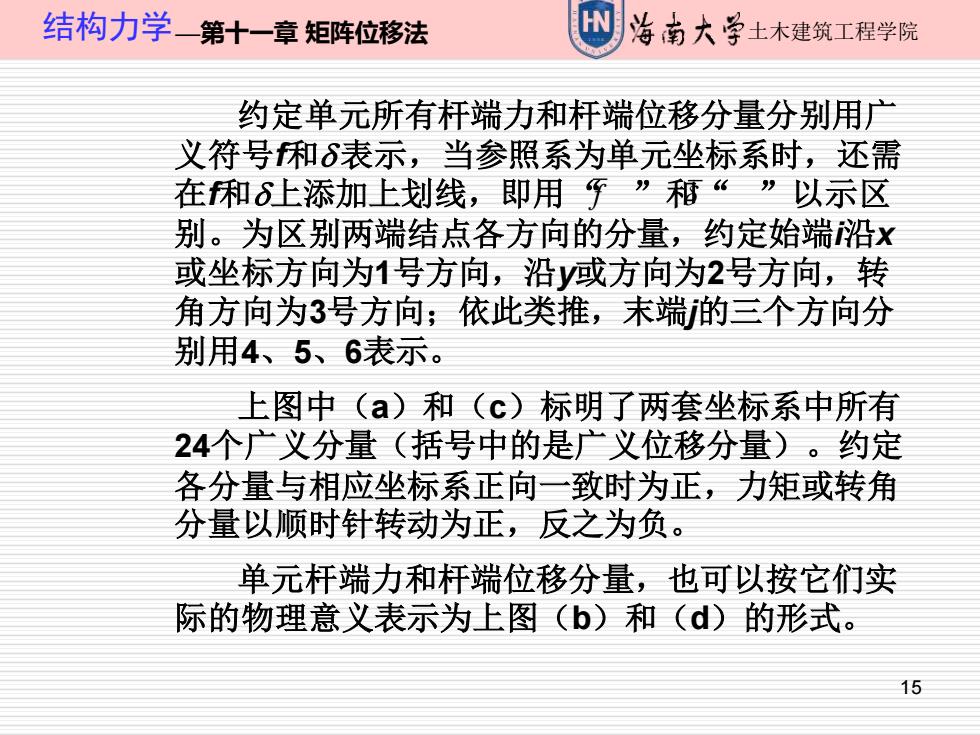
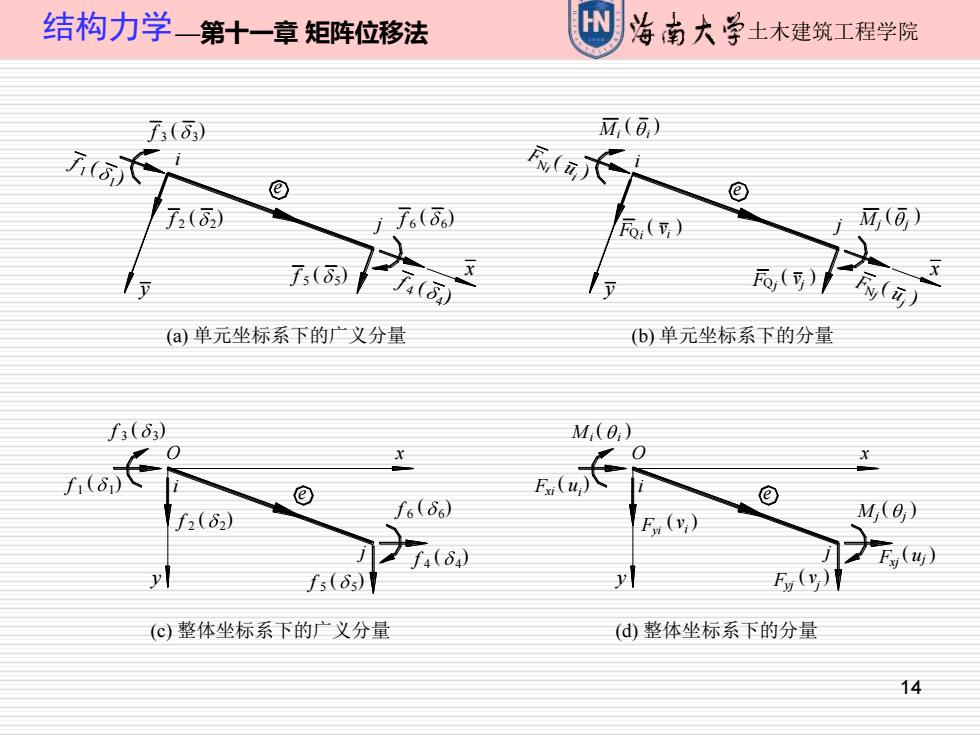
结构力学一第十一章矩阵位移法 海南大学士木建筑工程学院 约定单元所有杆端力和杆端位移分量分别用广 义符号和δ表示,当参照系为单元坐标系时,还需 在和6上添加上划线,即用牙”稻“”以示区 别。为区别两端结点各方向的分量,约定始端沿x 或坐标方向为1号方向,沿y或方向为2号方向,转 角方向为3号方向;依此类推,末端的三个方向分 别用4、5、6表示。 上图中(a)和(c)标明了两套坐标系中所有 24个广义分量(括号中的是广义位移分量)。约定 各分量与相应坐标系正向一致时为正,力矩或转角 分量以顺时针转动为正,反之为负。 单元杆端力和杆端位移分量,也可以按它们实 际的物理意义表示为上图(b)和(d)的形式。 15
15 结构力学—第十一章 矩阵位移法 土木建筑工程学院 约定单元所有杆端力和杆端位移分量分别用广 义符号f和d 表示,当参照系为单元坐标系时,还需 在f和d上添加上划线,即用 “ ”和“ ”以示区 别。为区别两端结点各方向的分量,约定始端i沿x 或坐标方向为1号方向,沿y或方向为2号方向,转 角方向为3号方向;依此类推,末端j的三个方向分 别用4、5、6表示。 上图中(a)和(c)标明了两套坐标系中所有 24个广义分量(括号中的是广义位移分量)。约定 各分量与相应坐标系正向一致时为正,力矩或转角 分量以顺时针转动为正,反之为负。 单元杆端力和杆端位移分量,也可以按它们实 际的物理意义表示为上图(b)和(d)的形式。 f d
结构力学一—第十一章矩阵位移法 海南大学土木建筑工程学院 即用轴力、剪力、弯矩和水平位移分量山、竖直位 移分量、转角位移分量等我们熟知的表示方法 来绘制。采取传统方法表示时,各分量用下标注明 其作用的结点;同时,若参照系为单元坐标系,各 分量还需添加上划线以示区别。 公式(11.1)和(11-2)给出了参照系为单元 坐标系时,分别使用广义方式和传统方式表示的单 元杆端力和杆端位移列阵。 单元坐标系中的单元杆端力列阵为 16
16 结构力学—第十一章 矩阵位移法 土木建筑工程学院 即用轴力、剪力、弯矩和水平位移分量u、竖直位 移分量v、转角位移分量q 等我们熟知的表示方法 来绘制。采取传统方法表示时,各分量用下标注明 其作用的结点;同时,若参照系为单元坐标系,各 分量还需添加上划线以示区别。 公式(11-1)和(11-2)给出了参照系为单元 坐标系时,分别使用广义方式和传统方式表示的单 元杆端力和杆端位移列阵。 单元坐标系中的单元杆端力列阵为