结构力学—第十一章矩阵位移法 治南大学土木建筑工程学院 点等成为连接各个单元的结点。只要确定了杆件结 构中的全部结点,结构中各结点间的所有单元也就 随之确定了。 确定结点时,常常采用顺序编号的方法,这些 编号称为结点码。在确定完结点码后,对结点间的 单元也依次编号,从而获得单元码。如图所示分别 是两个结构离散化后的结点和单元编码情况。 ELE13 6 02 ⑤⑥ ⑧ 2 ④ ① ② ⑥ (a) (b)
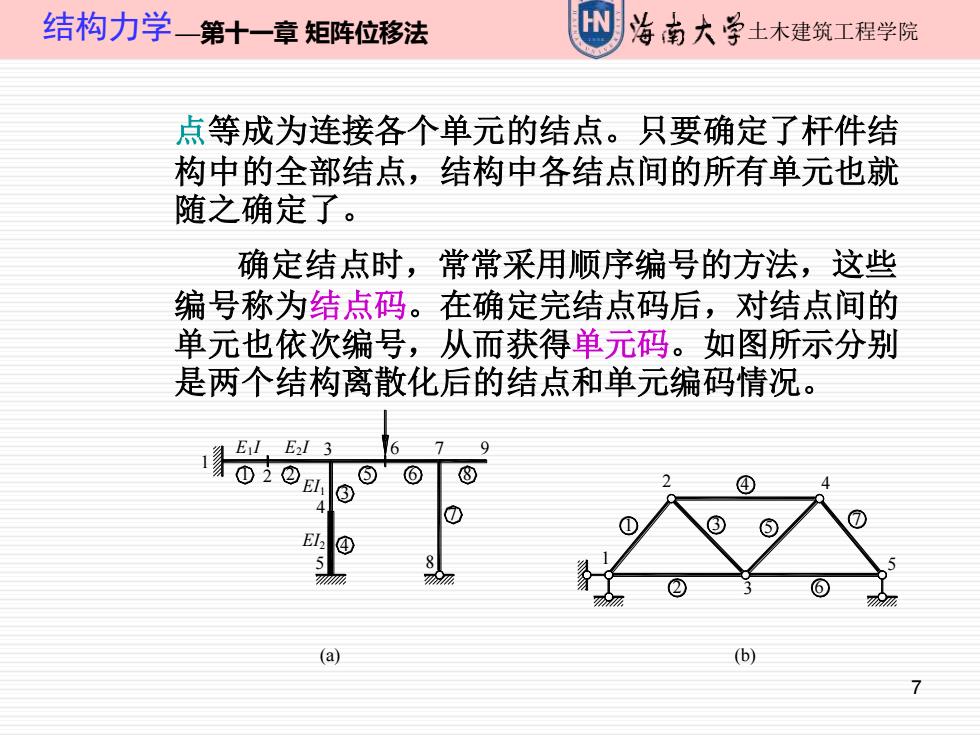
7 结构力学—第十一章 矩阵位移法 土木建筑工程学院 点等成为连接各个单元的结点。只要确定了杆件结 构中的全部结点,结构中各结点间的所有单元也就 随之确定了。 确定结点时,常常采用顺序编号的方法,这些 编号称为结点码。在确定完结点码后,对结点间的 单元也依次编号,从而获得单元码。如图所示分别 是两个结构离散化后的结点和单元编码情况。 EI2 EI1 E1 I 6 5 4 3 2 1 7 6 5 4 3 2 1 9 8 7 5 4 3 8 7 4 3 2 2 1 1 E2 I 5 6 (a) (b)
结构力学一第十一章矩阵位移法 W 海南大学土木建筑工程学院 11.2.2两种直角坐标系 结构离散化后,杆件单元的方向千差万别。在 作整体分析时,需要在结点处建立平衡方程,为此 又需要一个统一的计算基准坐标系。因此,这里引 入两套直角坐标系来建立后续需要研究的力和位移 等物理量之间的关系。 (1)单元坐标系 单元坐标系(又称局部坐标系)是单元分析时 使用的坐标系,它只与具体的某一单元相对应。对 结构中任意单元©,本章约定其坐标系用x-表示; 坐标系原点取为该单元一端的端结点(称为始结 点或始端);由原点指向另一端结点j(称为末结 点或末端)的方向,为杆轴x坐标正向,记作x©;
8 结构力学—第十一章 矩阵位移法 土木建筑工程学院 11.2.2 两种直角坐标系 结构离散化后,杆件单元的方向千差万别。在 作整体分析时,需要在结点处建立平衡方程,为此 又需要一个统一的计算基准坐标系。因此,这里引 入两套直角坐标系来建立后续需要研究的力和位移 等物理量之间的关系。 (1)单元坐标系 单元坐标系(又称局部坐标系)是单元分析时 使用的坐标系,它只与具体的某一单元相对应。对 结构中任意单元 e ,本章约定其坐标系用 表示; 坐标系原点取为该单元一端的端结点i(称为始结 点或始端);由原点指向另一端结点j(称为末结 点或末端)的方向,为杆轴 坐标正向,记作 ; x y − x ( ) e x
结构力学—第十一章矩阵位移法 治南大学土木建筑工程学院 以轴沿顺时针方向旋转90°为坐标轴)正向,记 作,如下图所示。 (2) v(I (2)整体坐标系 整体坐标系(又称结构坐标系)是整体分析时 使用的坐标系,它不和任何单元直接相关。设置整 9
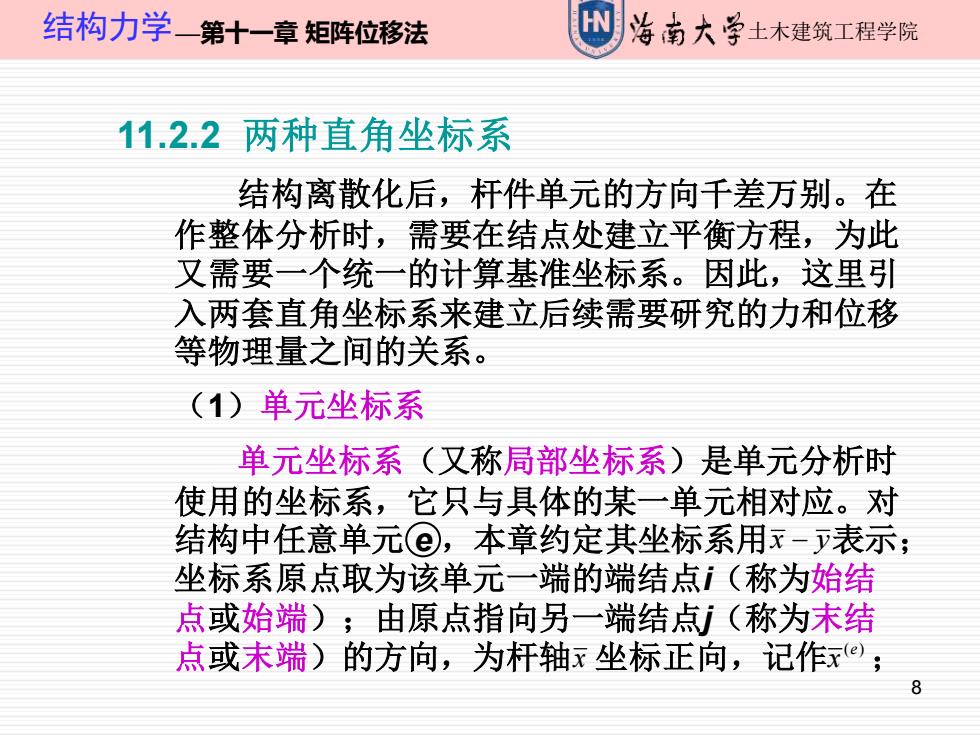
9 结构力学—第十一章 矩阵位移法 土木建筑工程学院 以轴沿顺时针方向旋转90°为坐标轴 正向,记 作 ,如下图所示。 y ( ) e y 3 x (a) (b) 1 2 y x 1 2 3 y x (1) (1) x (2) (2) y O y 2 1 1 O 2 (2)整体坐标系 整体坐标系(又称结构坐标系)是整体分析时 使用的坐标系,它不和任何单元直接相关。设置整
结构力学一第十一章矩阵位移法 海南大学士木建筑工程学院 体坐标系的目的是使各物理量在进行整体分析时有 统一的衡量尺度。本章约定整体坐标系使用xy表 示,X轴正方向水平向右,以x轴沿顺时针方向旋转 90°为y轴正向,即y轴正方向竖直向下,整体坐标 系原点可取为任意点。 Fe③ 2) ① 立() 10
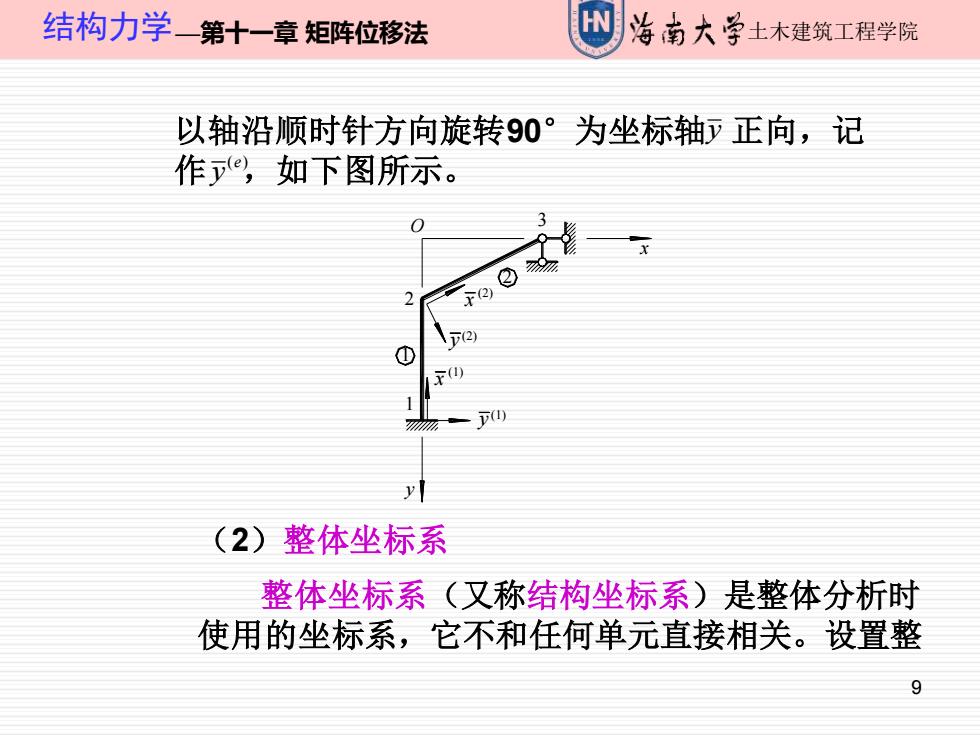
10 结构力学—第十一章 矩阵位移法 土木建筑工程学院 体坐标系的目的是使各物理量在进行整体分析时有 统一的衡量尺度。本章约定整体坐标系使用x-y表 示,x轴正方向水平向右,以x轴沿顺时针方向旋转 90°为y轴正向,即y轴正方向竖直向下,整体坐标 系原点可取为任意点。 3 x (a) (b) 1 2 y x 1 2 3 y x (1) (1) x (2) (2) y O y 2 1 1 O 2
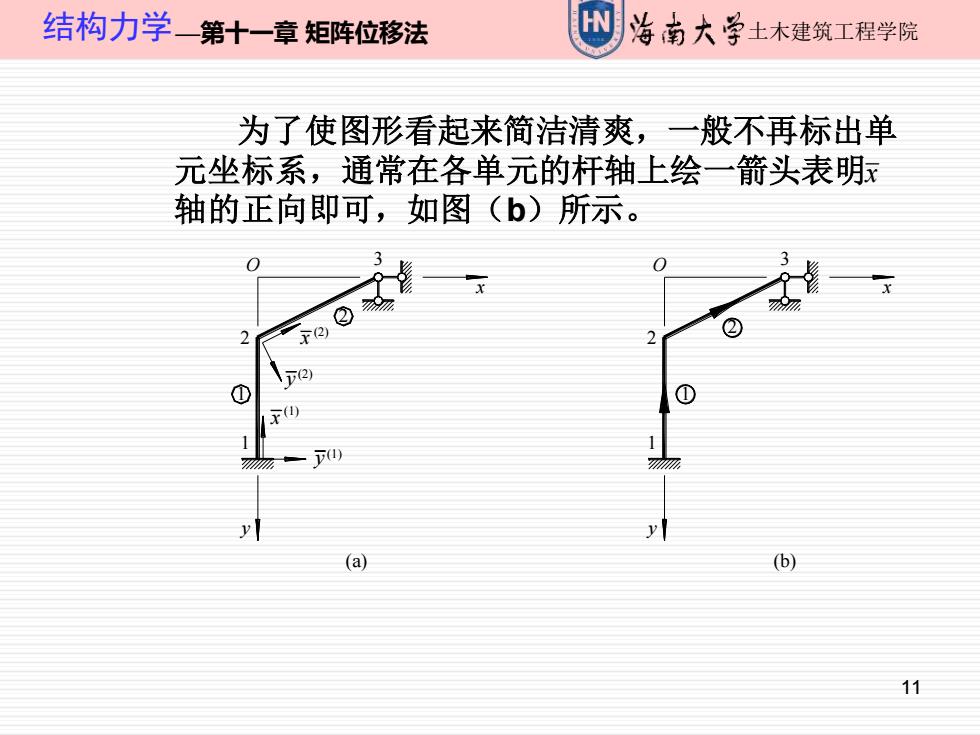
结构力学一—第十一章矩阵位移法 W 南大学士木建筑工程学院 为了使图形看起来简洁清爽,一般不再标出单 元坐标系,通常在各单元的杆轴上绘一箭头表明脉 轴的正向即可,如图(b)所示。 2) (a) (b) 11
11 结构力学—第十一章 矩阵位移法 土木建筑工程学院 为了使图形看起来简洁清爽,一般不再标出单 元坐标系,通常在各单元的杆轴上绘一箭头表明 轴的正向即可,如图(b)所示。 3 x (a) (b) 1 2 y x 1 2 3 y x (1) (1) x (2) (2) y O y 2 1 1 O 2 x