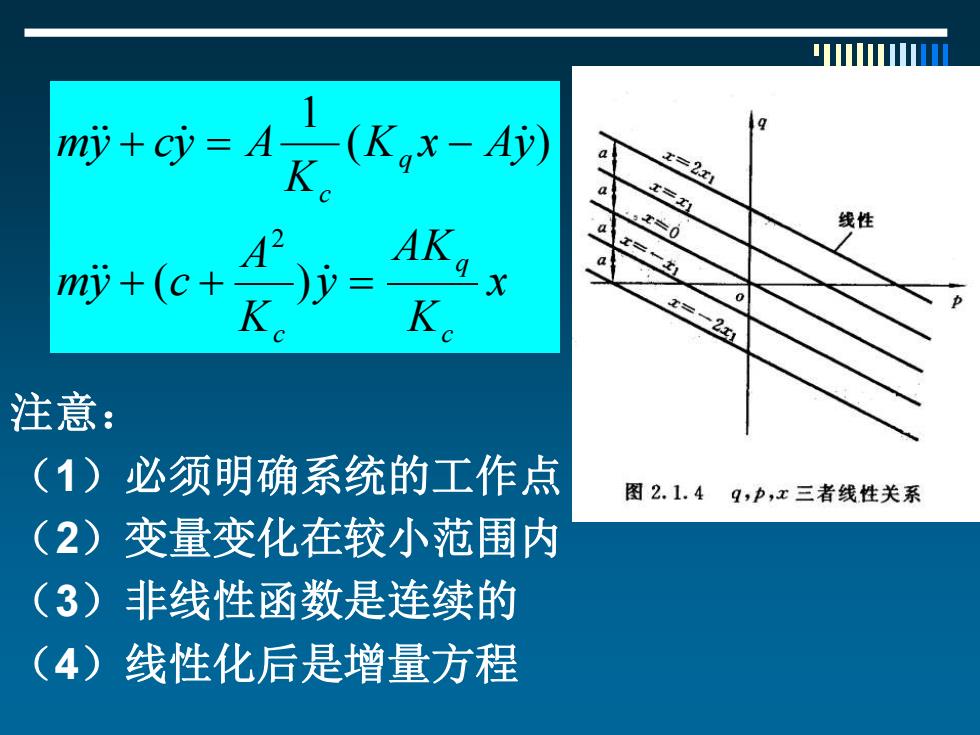
M m+e少=A2(Kgx-A例 K x=2x1 a x=到 x=0 线性 2 m+(c+- K K x=一2 注意: (1)必须明确系统的工作点 图2.1.4q,p,x三者线性关系 (2)变量变化在较小范围内 (3)非线性函数是连续的 (4)线性化后是增量方程
x K AK y K A my c K x Ay K my cy A c q c q c + + = + = − ( ) ( ) 1 2 注意: (1)必须明确系统的工作点 (2)变量变化在较小范围内 (3)非线性函数是连续的 (4)线性化后是增量方程
2.2系统传递函数 一 传递函数 在外界输入作用前,输入、输出的初始条件 为零时,线性定常系统、环节或元件的输出 xo()的Laplace变换Xo(s)与输入xi(t)的 Laplace变换Xi(s)之比,称为该系统、环节 或元件的传递函数G(s) G(S)= L[x,(t)] X(s) LIx,(t)] X(s) busm+bmsm+.+s+bo ans”+an-1s7+.+as+a n≥m
2.2 系统传递函数 一 传递函数 在外界输入作用前,输入、输出的初始条件 为零时,线性定常系统、环节或元件的输出 xo(t)的Laplace变换Xo(s)与输入xi(t)的 Laplace变换Xi(s)之比,称为该系统、环节 或元件的传递函数G(s)。 1 0 1 1 1 0 1 1 . . ( ) ( ) [ ( )] [ ( )] ( ) a s a s a s a b s b s b s b X s X s L x t L x t G s n n n n m m m m i o i o + + + + + + + + = = = − − − − n>m
传递函数特点: 口(1)传递函数分母(左端阶数及各项系数)只取决于素 统本身与外界无关的固有特性;传递函数的分子(右 端阶数及各项系数)只取决于系统与外界之间的关系。 (2)若输入已经给定,则系统的输出完全取决于其传 递函数。 x(t)=L'[X。(s】=L[G(s)X,(s)】 (3)传递函数分母中s的阶数n必不小于分子中s的阶 数m,即n2m,因为实际系统或元件总有惯性。 (4)传递函数可以是有量纲,也可以是无量纲的。 (⑤)物理性质不同的系统、环节或元件,可以具有相 同类型的传递函数
传递函数特点: (1)传递函数分母(左端阶数及各项系数)只取决于系 统本身与外界无关的固有特性;传递函数的分子(右 端阶数及各项系数)只取决于系统与外界之间的关系。 (2)若输入已经给定,则系统的输出完全取决于其传 递函数。 (3)传递函数分母中s的阶数n必不小于分子中s的阶 数m,即n≥m,因为实际系统或元件总有惯性。 (4)传递函数可以是有量纲,也可以是无量纲的。 (5)物理性质不同的系统、环节或元件,可以具有相 同类型的传递函数。 ( ) [ ( )] [ ( ) ( )] 1 1 x t L X s L G s X s o o i − − = =
二传递函数的零点、极点和放大系数 系统的传递函数G(s)是以复变函数s作为自 变量的函数。经因式分解后可以写成 G(S)= K(S-21S-22)(S-2m) K为常数 (s-P)(s-P2).s-p) 当s=Z时,均能使G(s)=0,故称z为G(s)的零点 当s=p:时,均能使G(s)的分母为0,故称p为G(s)的极点 传递函数的极点就是微分方程的特征根
二 传递函数的零点、极点和放大系数 系统的传递函数G(s)是以复变函数s作为自 变量的函数。经因式分解后可以写成 ( )( ).( ) ( )( ).( ) ( ) 1 2 1 2 n m s p s p s p K s z s z s z G s − − − − − − = K为常数 当s=zj 时,均能使G(s)=0 ,故称zj为G(s)的零点 当s=pi 时,均能使G(s)的分母为0 ,故称pi为G(s)的极点 传递函数的极点就是微分方程的特征根
根据微分方程的解可知, 系统的瞬态响应, 由以下形式的分量构成 ,eo sin wt,e cos @t 式中:p和o+jω是系统传递函数极点,也是微分方程 的特征根。 ■假定所有的极点是负数或具有负实部的复数,即p<0, o<0,当t→∞时,上述分量趋向于零,瞬态响应是收 敛的。因此说系统是稳定的。 ■系统是否稳定由极点性质决定。 ■当系统输入信号一定时,系统的零、极点决定着系统 的动态性能,即零点对系统的稳定性没有影响,但它对 瞬态响应曲线的形状有影响
根据微分方程的解可知,系统的瞬态响应, 由以下形式的分量构成 e e t e t pt t t , sin , cos 式中:p和σ+jω是系统传递函数极点,也是微分方程 的特征根。 ◼假定所有的极点是负数或具有负实部的复数,即p<0, σ< 0,当t→∞时,上述分量趋向于零,瞬态响应是收 敛的。因此说系统是稳定的。 ◼系统是否稳定由极点性质决定。 ◼当系统输入信号一定时,系统的零、极点决定着系统 的动态性能,即零点对系统的稳定性没有影响,但它对 瞬态响应曲线的形状有影响