第四章计算机控制系统特性分析 一4.1计算机控制系统的稳定性 4.2计算机控制系统的动态特性 一4.3计算机控制系统的稳态误差 j江mz &平面 z平面 Rez
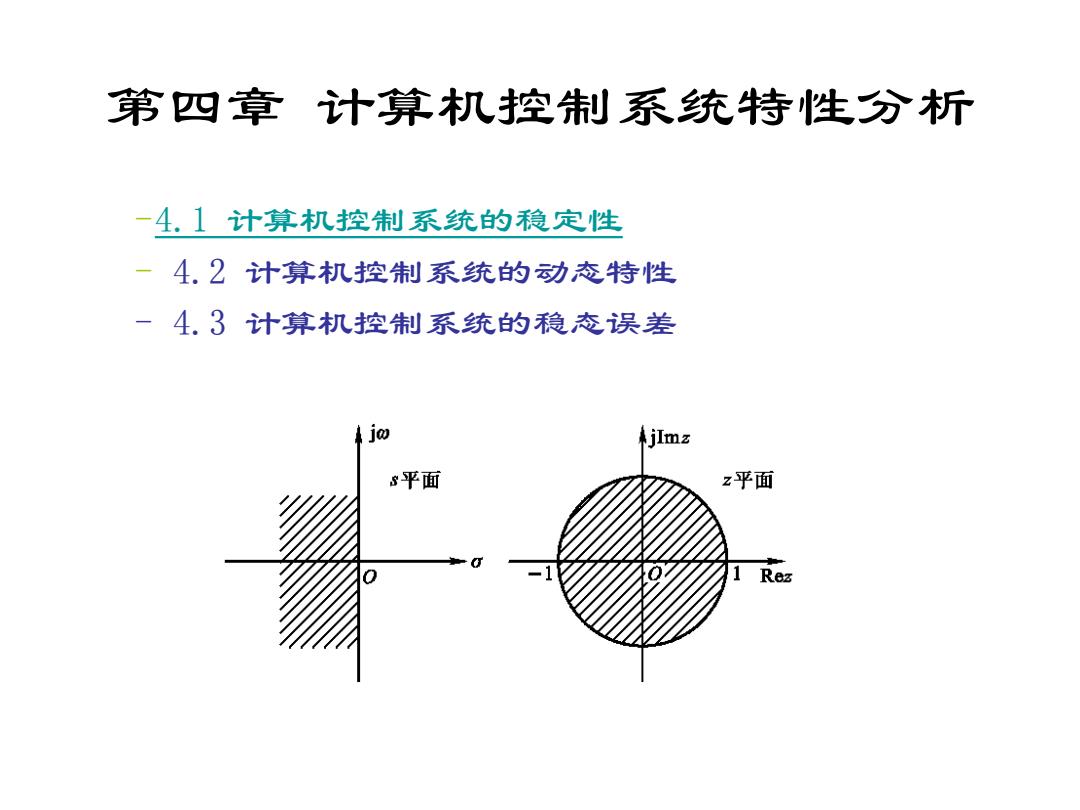
第四章 计算机控制系统特性分析 –4.1 计算机控制系统的稳定性 – 4.2 计算机控制系统的动态特性 – 4.3 计算机控制系统的稳态误差
线性离散系统稳定的充要条件 设闭环离散系统的特征方程式的根为 21,22,…二n(即是闭环脉冲传递函数的极点)。那 么,线性离散控制系统稳定的充要条件是: 闭环系统特征方程的所有根的模|2:|<1, 即闭环脉中传递数的极点均位于平面的单位 圆内
线性离散系统稳定的充要条件 设 闭 环 离 散 系 统 的 特 征 方 程 式 的 根 为 z1 ,z2 ,…,zn(即是闭环脉冲传递函数的极点)。那 么,线性离散控制系统稳定的充要条件是: 闭环系统特征方程的所有根的模|zi|<1, 即闭环脉冲传递函数的极点均位于z平面的单位 圆内
修正的劳斯一霍尔维茨稳定判据 连续系统的劳斯-霍尔维茨稳定判据,是通过 系统特征方程的系数及其符号来判断系统的稳定 性。这个方法实际上仍是判断特征方程的根是否 都在s平面的左半部。将z平面单位圆内区域映射 为另一平面上的左半部,就可以应用劳斯-霍尔维 茨稳定判据来判断离散系统的稳定性。为此,可 采用双线性变换方法进行判断。 双线性变换I 双线性变换Ⅱ 劳斯-霍尔维茨稳定判据
修正的劳斯-霍尔维茨稳定判据 • 连续系统的劳斯-霍尔维茨稳定判据,是通过 系统特征方程的系数及其符号来判断系统的稳定 性。这个方法实际上仍是判断特征方程的根是否 都在s平面的左半部。将z平面单位圆内区域映射 为另一平面上的左半部,就可以应用劳斯-霍尔维 茨稳定判据来判断离散系统的稳定性。为此,可 采用双线性变换方法进行判断。 – 双线性变换Ⅰ – 双线性变换Ⅱ – 劳斯-霍尔维茨稳定判据
计算机控制系统的动态特性 Ay2(kT) A4(kT) jImz kT y(T) ys(kT) T '6(kT) Y3(kT 单位圆 kT
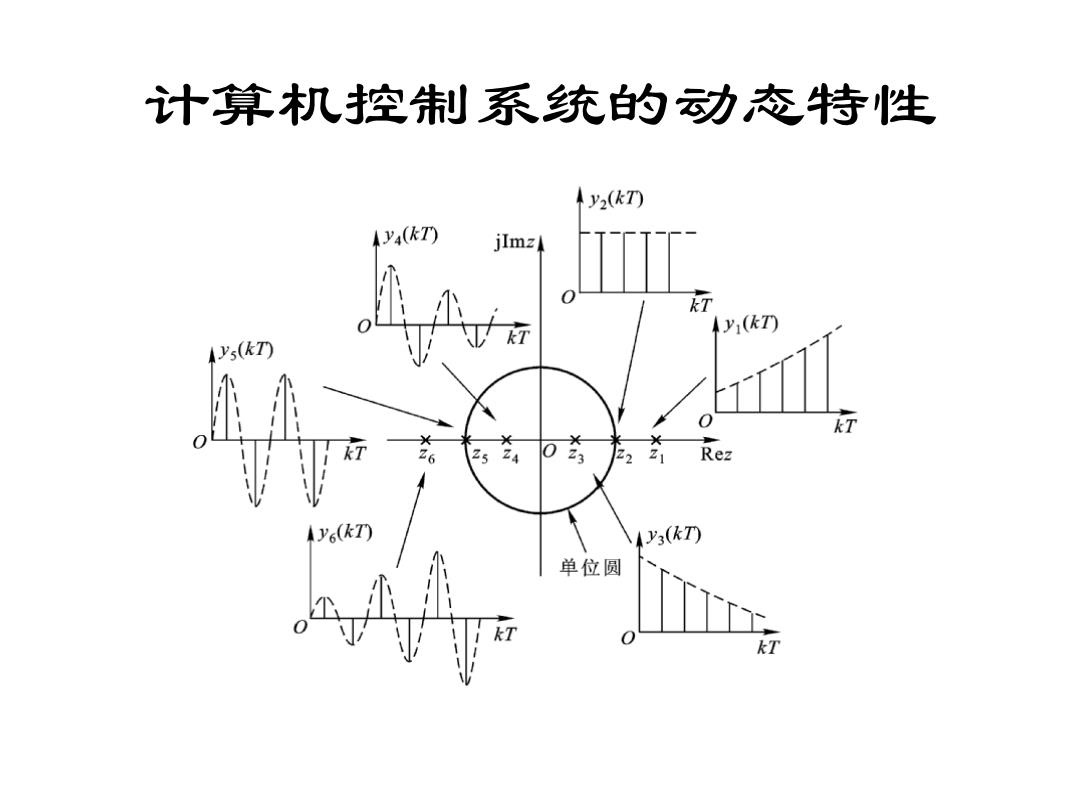
计算机控制系统的动态特性

计算机控制系统的稳态误差 设单位反馈误差采样系统如图4.12所示。系统误差 脉冲传递函数为 E(2) 1 ②(2)= R(z) 1+G(z) 若离散系统是稳定的,则可用变换的终值定理求出采样 瞬时的终值误差 e(o)=lim e()=lim(1-2)E()=lim (1-z1)R(z) →1 [1+G(z] R(s) E(s) E(8) G(s) (s) 图4.12单位反馈禽散系统
计算机控制系统的稳态误差 设单位反馈误差采样系统如图4.12所示。系统误差 脉冲传递函数为 若离散系统是稳定的,则可用z变换的终值定理求出采样 瞬时的终值误差 [1 ( )] (1 ) ( ) ( ) lim ( ) lim (1 ) ( ) lim 1 1 1 1 * G z z R z e e t z E z t z z + − = = − = − → − → → = = + e ( ) 1 ( ) ( ) 1 ( ) E z z R z G z 图4.12 单位反馈离散系统