第8章第2课 在本次课中,将介绍触发器的动作特点及同 步时序逻辑电路分析简介
第8章第2课 在本次课中,将介绍触发器的动作特点及同 步时序逻辑电路分析简介

相关知识点与学习目标 本课涉及“触发器的动作特点、同步时序电路的分 析方法”2个知识点,通过本课学习,应懂得触发器 的动作特点与逻辑功能是2个不同的概念,掌握同步触 发、边沿触发等结构触发器的动作特点及同步时序逻 辑电路分析的一般过程与方法
相关知识点与学习目标 本课涉及“触发器的动作特点、同步时序电路的分 析方法” 2个知识点,通过本课学习,应懂得触发器 的动作特点与逻辑功能是2个不同的概念,掌握同步触 发、边沿触发等结构触发器的动作特点及同步时序逻 辑电路分析的一般过程与方法
同步触发器 触发器的动作特点(外部如何输入才能被 触发器确认)由触发器的电路结构决定 触发器有同步结构、主从结构、维持阻塞 结构等多种类型。 Name: 25.0ms 50.0ms CP 同步结构的RS 触发器时序图工 R 作波形图如右 0 CP=1期间,输入的变化都会引发Q的变化
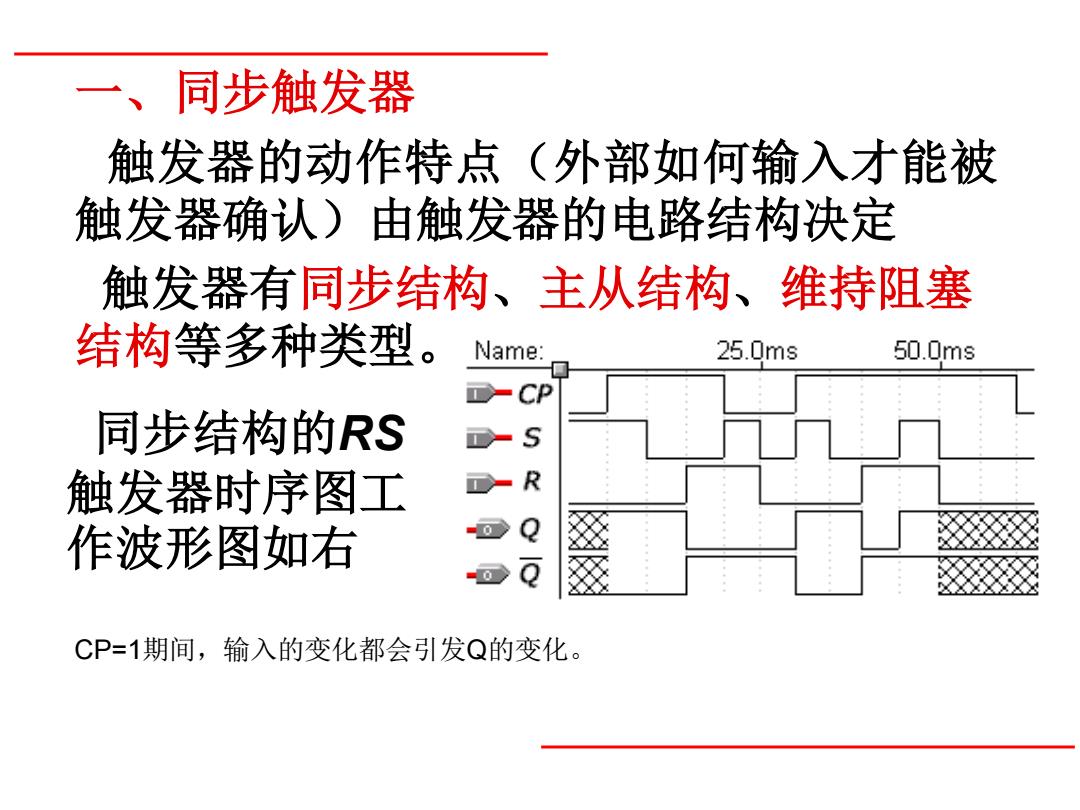
一、同步触发器 触发器的动作特点(外部如何输入才能被 触发器确认)由触发器的电路结构决定 触发器有同步结构、主从结构、维持阻塞 结构等多种类型。 同步结构的RS 触发器时序图工 作波形图如右 CP=1期间,输入的变化都会引发Q的变化
同步触发器的动作特点如下: 当钟控信号CP未到来时,同步触发器不接受输入 激励信号,触发器的状态保持不变 当钟控信号CP到来时,触发器接受输入激励信号, 正常工作。这种时钟控制方式称为电位触发方式。 电位触发方式的特点是,当钟控信号CP到来时, 触发器接受输入信号,而且在此期间只要输入激励信 号一旦有变化,都会引起触发器的改变。 这种现象称为触发器的空翻现象。 为了从根本上克服触发器的空翻现象,只有采取 其它的电路结构
同步触发器的动作特点如下: 当钟控信号CP未到来时,同步触发器不接受输入 激励信号,触发器的状态保持不变 当钟控信号CP到来时,触发器接受输入激励信号, 正常工作。这种时钟控制方式称为电位触发方式。 电位触发方式的特点是,当钟控信号CP到来时, 触发器接受输入信号,而且在此期间只要输入激励信 号一旦有变化,都会引起触发器的改变。 这种现象称为触发器的空翻现象。 为了从根本上克服触发器的空翻现象,只有采取 其它的电路结构
Name: 25.0ms 50.0ms CP 二主从结构触发器 主从RS触发器时 R 序图如右 Q 在第1个钟控信号CP高电平期间,主触发器接 收输入信号,按照同步RS触发器所示状态发生 变化,但做为最终输出的从触发器保持不变。 在第1个钟控信号CP下降沿及低电平期间,从 触发器按照主触发器最后1个状态翻转到0,从而 实现了在钟控信号CP到来期间,触发器的状态 只改变一次
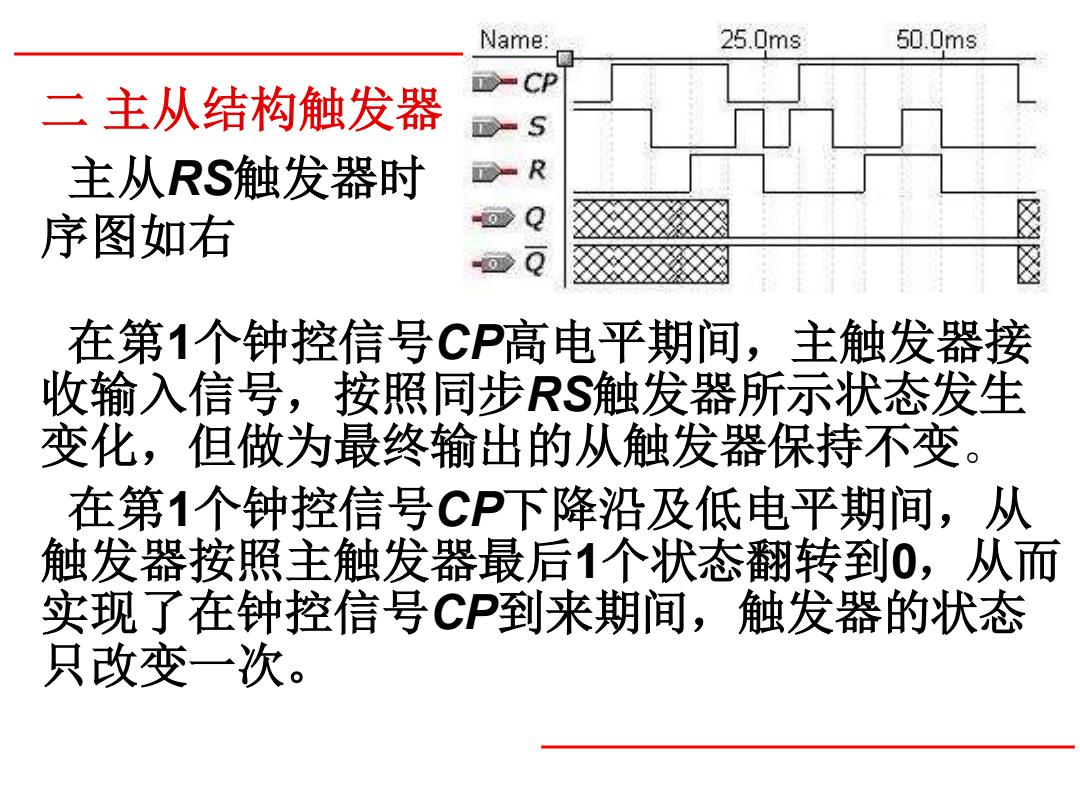
二 主从结构触发器 主从RS触发器时 序图如右 在第1个钟控信号CP高电平期间,主触发器接 收输入信号,按照同步RS触发器所示状态发生 变化,但做为最终输出的从触发器保持不变。 在第1个钟控信号CP下降沿及低电平期间,从 触发器按照主触发器最后1个状态翻转到0,从而 实现了在钟控信号CP到来期间,触发器的状态 只改变一次