4.9 CPM信号的最佳接收机 ●CPM信号的最佳解调和检测 ●CPM信号的性能 1
1 4.9 CPM信号的最佳接收机 ⚫CPM信号的最佳解调和检测 ⚫CPM信号的性能

CPM信号的最佳接收机 CPM发送信号 s(t)= cos[2对t+(t,I)] 有记忆调制; 记忆来自相位连续性 接收信号 r(t)=s(t)+n(t) n(t)=n (t)cos2nft-n,(t)sin2nfi CPM信号的最佳接收机: 相关器 最大似然序列检测器 ●通过状态网格搜索最小欧氏距离的路径 ●采用Viterbi搜索算法 下面的工作: 1.建立CPM的状态网格结构 2.确定Viterbi)度量的计算 2
2 cos[2 ( , )] 2 ( ) f t t I T s t c = + CPM信号的最佳接收机 r(t) = s(t) + n(t) n t n t f t n t f t c c s 2 c ( ) = ( ) cos2 − ( )sin CPM发送信号 接收信号 CPM信号的最佳接收机: 相关器 最大似然序列检测器 ⚫通过状态网格搜索最小欧氏距离的路径 ⚫采用Viterbi搜索算法 下面的工作: 1. 建立CPM的状态网格结构 2. 确定Viterbi度量的计算 有记忆调制; 记忆来自相位连续性
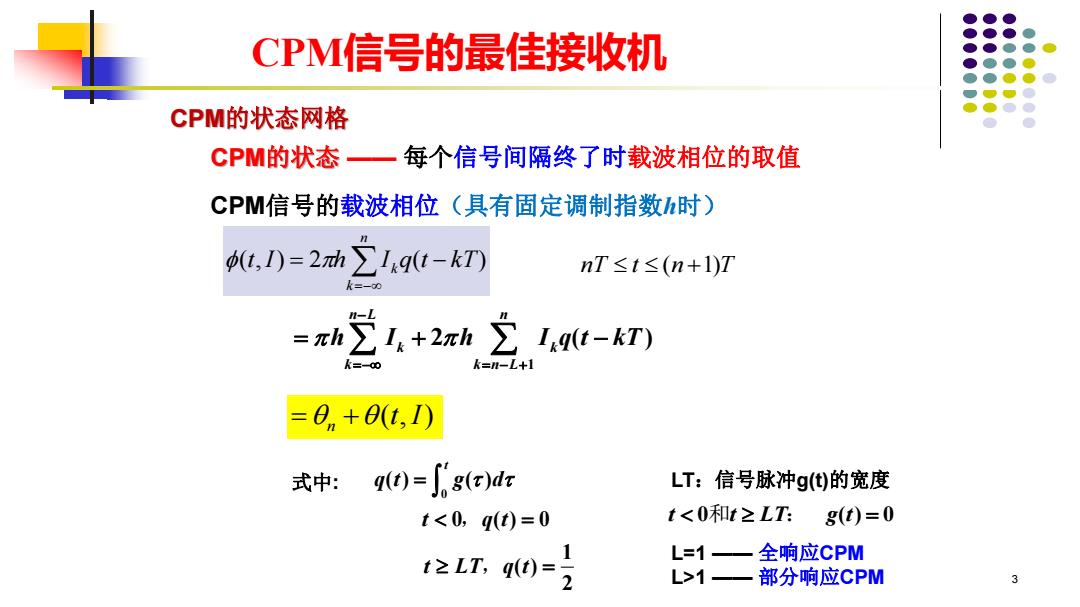
CPM信号的最佳接收机 CPM的状态网格 CPM的状态一 每个信号间隔终了时载波相位的取值 CPM信号的载波相位(具有固定调制指数h时) t,)=2h∑Iqt-kT nT≤t≤(n+1)T k=- -L =πh∑1+2πh∑lqt-kT) k=-0 k=-L+1 =0n+0(t,) 式中: ()=g()d LT:信号脉冲g()的宽度 t<0,q(t)=0 t<0和t≥LT: g(t)=0 1 tzLT,q(t)= L=1一全响应CPM -2 L>1一一部分响应CPM 3
3 CPM的状态网格 0 ( ) ( ) 0 ( ) 0 1 ( ) 2 t q t g d t q t t LT q t = = = , , CPM信号的载波相位(具有固定调制指数h时) 式中: (t,I) 2 h I q(t kT) n k = k − =− LT:信号脉冲g(t)的宽度 L=1 —— 全响应CPM L>1 —— 部分响应CPM 1 2 ( ) n L n k k k k n L h I h I q t kT − =− = − + = + − ( , ) n = + t I CPM信号的最佳接收机 nT t n T + ( 1) t t LT g t = 0 ( ) 0 和 : CPM的状态 —— 每个信号间隔终了时载波相位的取值
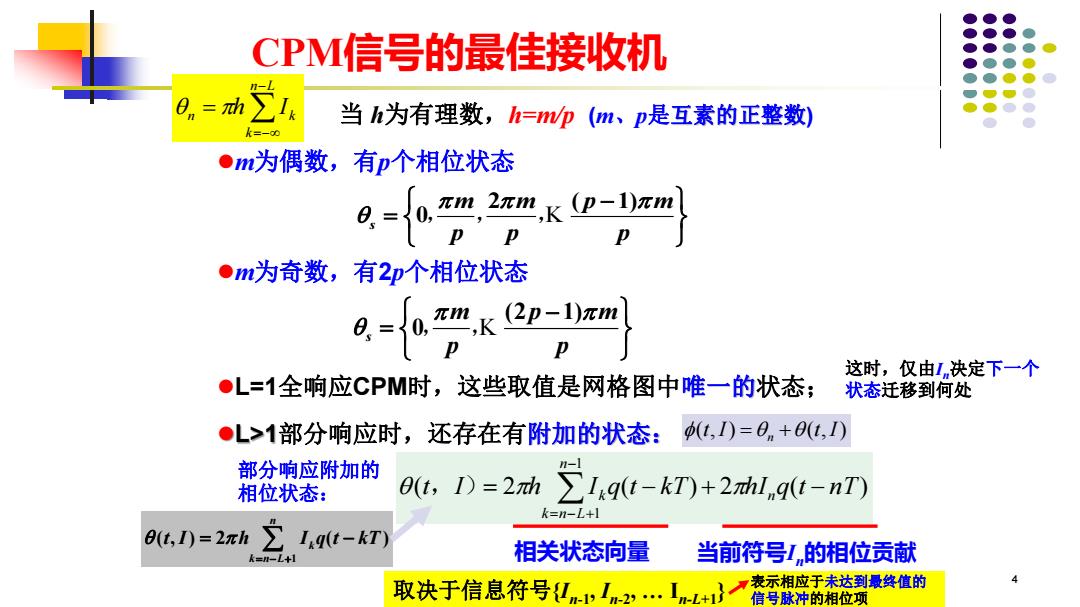
CPM信号的最佳接收机 当h为有理数,h=m(m、p是互素的正整数) =00 ●m为偶数,有p个相位状态 ●m为奇数,有2p个相位状态 -cm 这时,仅由I决定下一个 ●L=1全响应CPM时,这些取值是网格图中唯一的状态; 状态迁移到何处 ●L>1部分响应时,还存在有附加的状态: t,I)=0n+0(t,) 部分响应附加的 相位状态: 0t,)=2h >Ig(t-kT)+2zhl,q(t-nT) k=n-L+l 0,0=2xh1t-kT) k=-L+1 相关状态向量 当前符号1的相位贡献 取决于信息符号{Un-1,n-2…LnL+} 表示相应于未达到最终值的 信号脉冲的相位项
4 2 ( 1) 0 s m m p m p p p − = , , ,K (2 1) 0 s m p m p p − = , ,K ( 2 ( ) 2 ( ) 1 1 t I h I q t k T h In q t n T n k n L = k − + − − = − + , ) 当 h为有理数,h=m/p (m、p是互素的正整数) ⚫m为偶数,有p个相位状态 ⚫m为奇数,有2p个相位状态 部分响应附加的 相位状态: ⚫L=1全响应CPM时,这些取值是网格图中唯一的状态; 相关状态向量 当前符号In的相位贡献 取决于信息符号{In-1 , In-2 , … In-L+1} 1 ( , ) 2 ( ) n k k n L t I h I q t kT = − + = − (t,I) (t,I) = n + CPM信号的最佳接收机 − =− = n L k n k h I ⚫L>1部分响应时,还存在有附加的状态: 表示相应于未达到最终值的 信号脉冲的相位项 这时,仅由In决定下一个 状态迁移到何处
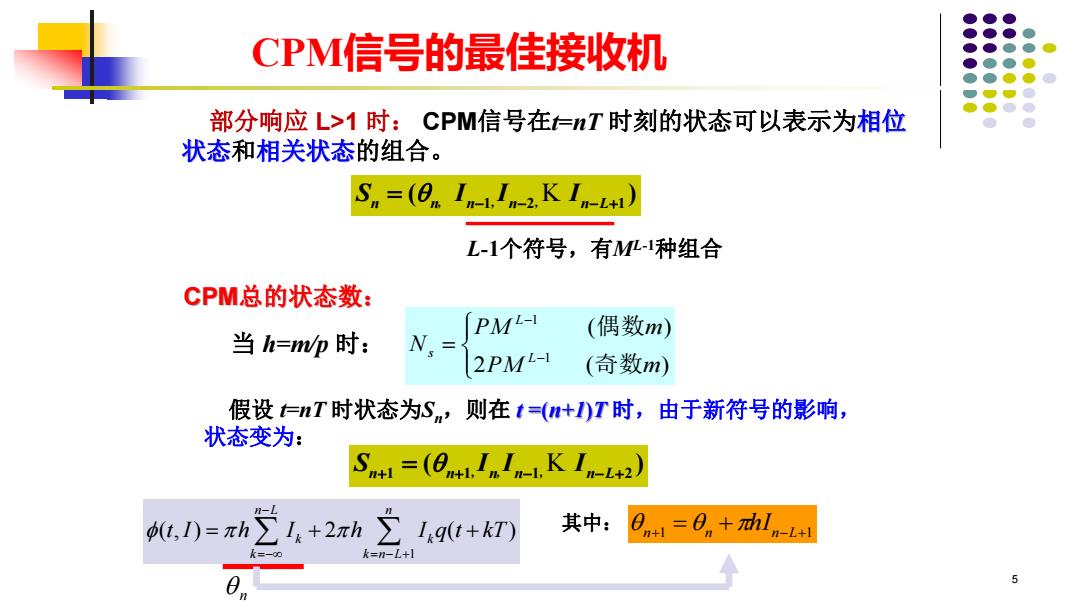
CPM信号的最佳接收机 部分响应L>1时:CPM信号在=T时刻的状态可以表示为相位 状态和相关状态的组合。 S.=(0 I-1.In2.K I1) L-1个符号,有ML-1种组合 CPM总的状态数: PML- (偶数m) 当h=mp时: N.= 2PM- (奇数m) 假设仁nT时状态为Sn,则在t=(+l)T时,由于新符号的影响, 状态变为: S=(e.InIn1.K In-12) ,D=h21:+2xh立1,qt+k 其中: k=-0 k=刀-L十1 5
5 1 ( , ) 2 ( ) n L n k k k k n L t I h I h I q t kT − =− = − + = + + 1 2 1 ( ) S I I I n n n n n L = , − − − + , , K 1 1 1 2 ( ) S I I I n n n n n L + + − − + = , , , K n+1 = n +hIn−L+1 部分响应 L>1 时: CPM信号在t=nT 时刻的状态可以表示为相位 状态和相关状态的组合。 假设 t=nT 时状态为Sn,则在 t =(n+1)T 时,由于新符号的影响, 状态变为: 其中: 当 h=m/p 时: = − − 2 ( ) ( ) 1 1 PM m PM m N L L s 奇数 偶数 CPM总的状态数: L-1个符号,有ML-1种组合 n CPM信号的最佳接收机