第4章 进给伺服驱动华统 4.1概述 4.2位置检测装置 4.3 进给电机及驱动 4.4进给伺服系统的控制原理和方法 4.5进给系统性能分析
1 4.1 概述 4.2 位置检测装置 4.3 进给电机及驱动 4.4 进给伺服系统的控制原理和方法 4.5 进给系统性能分析 第4章 进给伺服驱动系统
4.5伺服系统性能分析 前面各节我们重点讨论了进给伺服系统的组成原 理与实现方法,然而该系统要能真正实现预期的快 速、准确及平稳驱动的要求,一个重要的问题是如 何根据要求,进行闭环系统的参数设计和调试。例 如,开环增益,阻尼系数等参数对伺服系统的稳态 精度与动态性能影响很大,这将是本节讨论的重点
2 4.5 伺服系统性能分析 前面各节我们重点讨论了进给伺服系统的组成原 理与实现方法,然而该系统要能真正实现预期的快 速、准确及平稳驱动的要求,一个重要的问题是如 何根据要求,进行闭环系统的参数设计和调试。例 如,开环增益,阻尼系数等参数对伺服系统的稳态 精度与动态性能影响很大,这将是本节讨论的重点
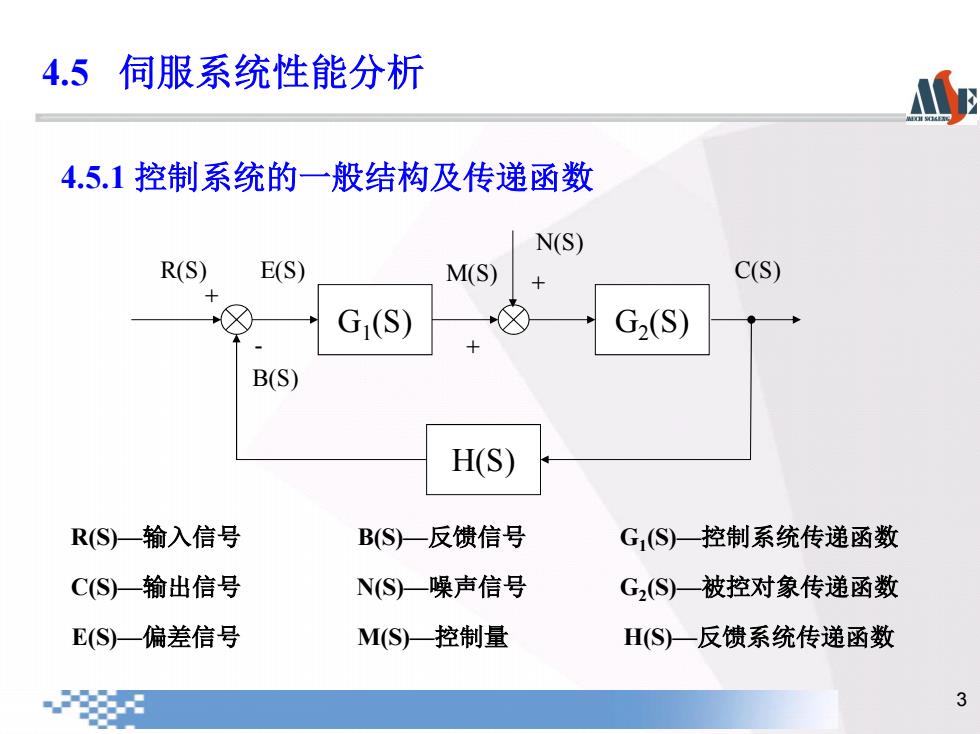
4.5伺服系统性能分析 4.5.1控制系统的一般结构及传递函数 N(S) R(S) E(S) M(S) C(S) Gj(S) G2(S) B(S) H(S) R(S)一输入信号 B(S)反馈信号 G(S)一控制系统传递函数 C(S)一输出信号 NS)一噪声信号 G,(S)一被控对象传递函数 E(S)一偏差信号 M(S)一控制量 H(S)一反馈系统传递函数 3
3 4.5.1 控制系统的一般结构及传递函数 R(S)—输入信号 C(S)—输出信号 E(S)—偏差信号 M(S)—控制量 B(S)—反馈信号 N(S)—噪声信号 G1(S)—控制系统传递函数 G2(S)—被控对象传递函数 H(S)—反馈系统传递函数 G1(S) G2(S) H(S) R(S) B(S) E(S) N(S) M(S) C(S) + - + + 4.5 伺服系统性能分析
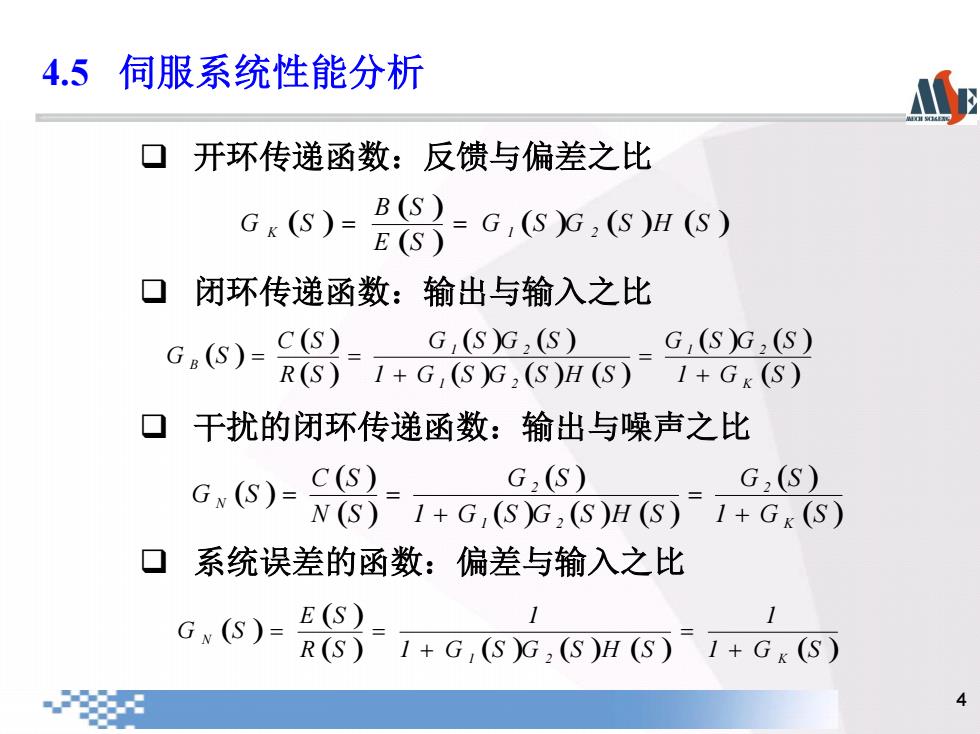
4.5伺服系统性能分析 开环传递函数:反馈与偏差之比 G(5)-E(5) B(S)=G,(SG:(S)H (S) 闭环传递函数:输出与输入之比 Gn(S)= C(S) G,(S)G,(S) G,(S)G,(S) R(S)1+G(S)G2(S)H(S)1+Gk(S) 干扰的闭环传递函数:输出与噪声之比 Gy(S)=C(S) G2(S) G,(S) N(S)1+G(S)G2(S)H(S)1+Gk(S) 0 系统误差的函数:偏差与输入之比 GN(S)= E(S) R(S)1+G(SG2(S)H(S)1+Gk(S)
4 开环传递函数:反馈与偏差之比 闭环传递函数:输出与输入之比 干扰的闭环传递函数:输出与噪声之比 系统误差的函数:偏差与输入之比 ( ) ( ) ( ) G (S )G (S )H (S ) E S B S G S K = = 1 2 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1 G (S ) G S G S 1 G S G S H S G S G S R S C S G S K 1 2 1 2 1 2 B + = + = = ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1 G (S ) G S 1 G S G S H S G S N S C S G S K 2 1 2 2 N + = + = = ( ) ( ) ( ) ( ) ( ) ( ) 1 G (S ) 1 1 G S G S H S 1 R S E S G S 1 2 K N + = + = = 4.5 伺服系统性能分析
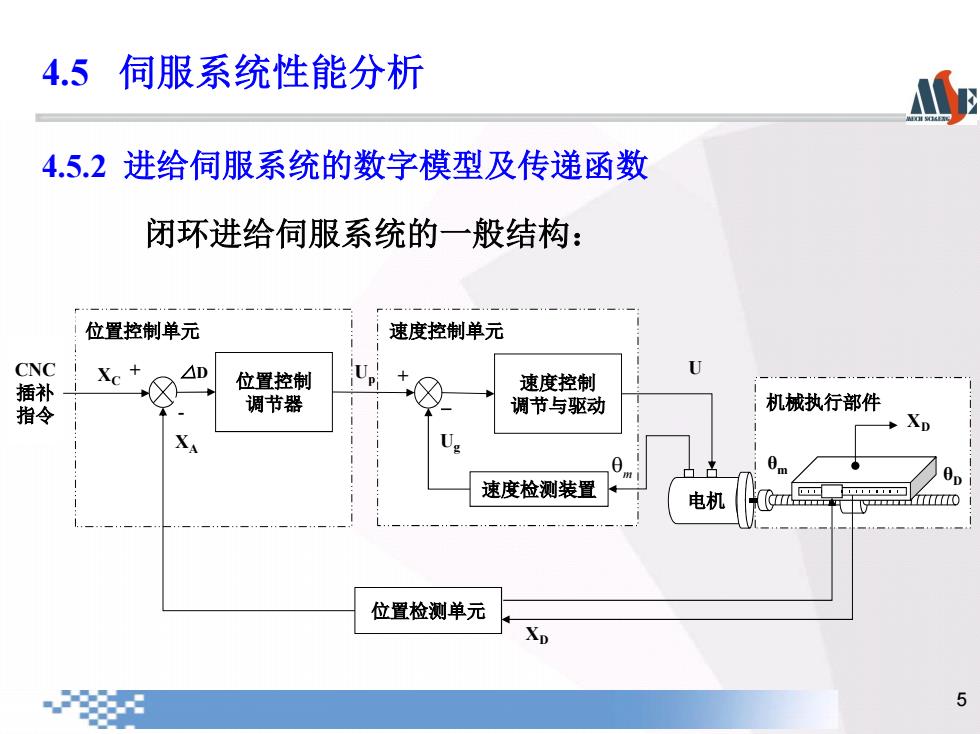
4.5 伺服系统性能分析 4.5.2进给伺服系统的数字模型及传递函数 闭环进给伺服系统的一般结构: 位置控制单元 速度控制单元 CNC Xc+ △D 插补 位置控制 速度控制 指令 调节器 调节与驱动 机械执行部件 XD X 0 速度检测装置 电机 u=h 位置检测单元 5
5 4.5.2 进给伺服系统的数字模型及传递函数 闭环进给伺服系统的一般结构: 位置控制 调节器 速度控制 调节与驱动 位置检测单元 位置控制单元 速度控制单元 + + - - 电机 机械执行部件 CNC 插补 指令 Ug Up U θm θD XD 速度检测装置 m XA XC XD △D 4.5 伺服系统性能分析