第4章 进给伺服驱动华统 4.1 概述 4.2 位置检测装置 4.3 进给电机及驱动 4.4进给伺服系统的控制原理和方法
1 第4章 进给伺服驱动系统 4.1 概述 4.2 位置检测装置 4.3 进给电机及驱动 4.4 进给伺服系统的控制原理和方法
4.1概述 进给伺服系统(Feed Servo System) 定义一以移动部件的位置和速度作为控制量的自动控制 系统。 作用:是数控装置和机床机械传动部件的连接环节,是 数控机床的重要组成部分。 功能:接受数控装置发来的指令信号,信号经变换和放 大由执行元件(伺服电机)将其转变为角位移或直线位 移,从而实现驱动数控机床各运动部件的进给运动。 2
2 4.1 概述 进给伺服系统(Feed Servo System) 定义—以移动部件的位置和速度作为控制量的自动控制 系统。 作用:是数控装置和机床机械传动部件的连接环节,是 数控机床的重要组成部分。 功能:接受数控装置发来的指令信号,信号经变换和放 大由执行元件(伺服电机)将其转变为角位移或直线位 移,从而实现驱动数控机床各运动部件的进给运动
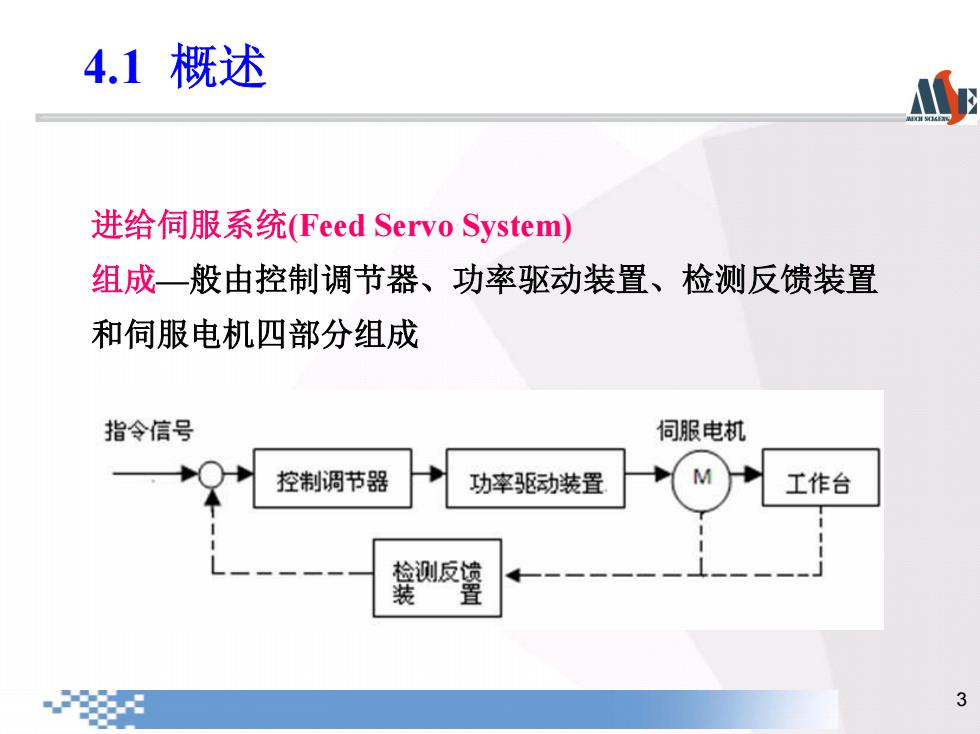
4.1概述 进给伺服系统(Feed Servo System) 组成一般由控制调节器、功率驱动装置、检测反馈装置 和伺服电机四部分组成 指令信号 伺服电机 控制调节器 功率驱动装置 M 工作台 检测反馈 装置 3
3 进给伺服系统(Feed Servo System) 组成—般由控制调节器、功率驱动装置、检测反馈装置 和伺服电机四部分组成 4.1 概述

4.1概述 gkong.com
4 4.1 概述
4.1概述 4.1.1数控机床对进给伺服驱动系统的要求 1.位置精度要高 静态(尺寸精度):定位精度和重复定位精度要高, 即定位误差和重复定位误差要小。高档数控机床微米级, 超精密机床亚微米级。 动态(轮廓精度):跟随精度,这是动态性能指标, 用跟随误差表示。 灵敏度要高:有足够高的分辩率。 5
5 1. 位置精度要高 静态(尺寸精度):定位精度和重复定位精度要高, 即定位误差和重复定位误差要小。高档数控机床微米级, 超精密机床亚微米级。 动态(轮廓精度):跟随精度,这是动态性能指标, 用跟随误差表示。 灵敏度要高:有足够高的分辩率。 4.1 概述 4.1.1 数控机床对进给伺服驱动系统的要求