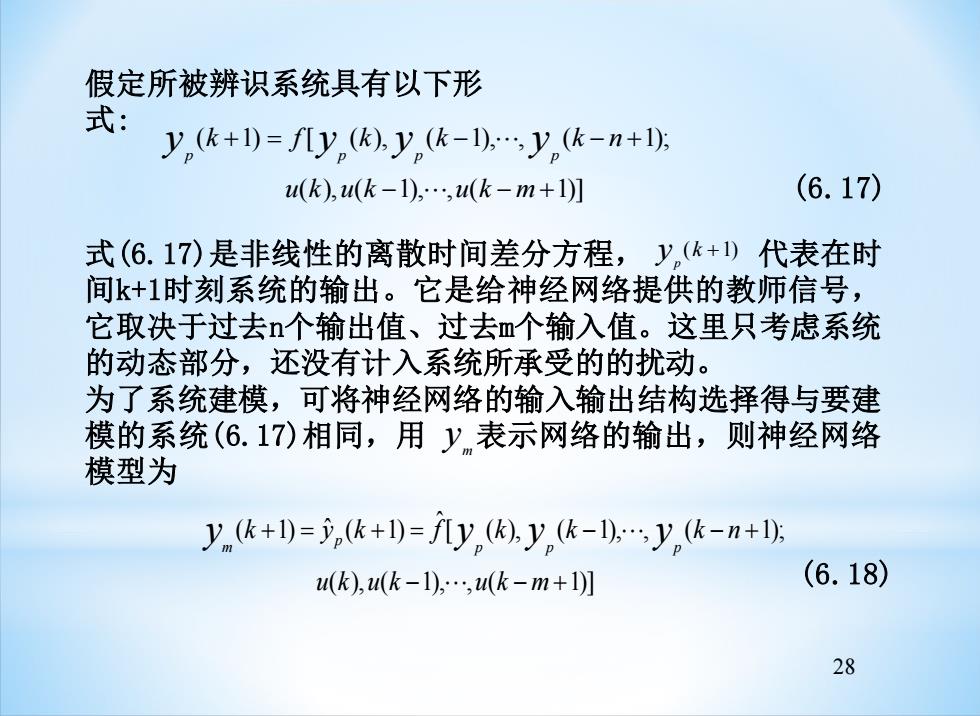
因此,辨识的系统就是根据模系统过程的输出误差,利用网 络的算法调节神经元网络的参数。直到模型参数收敛到它们 的期望值。如果神经元网络训练过程要表示系统正向动态, 这种建模方法就叫做正向辨识建模。其结构图示于图6.4。图 中TDL代表具有抽头的延时线,神经元网络与过程平行,系统 与神经网络的预估误差用作网络的训练信号,这种结构也称 为串-并辨识模型。学习的方法是有监督的。教师信号(即系 统的输出)直接向神经网络提供目标值。通过网络将预估误差 直接反传进行训练。 26
26 因此,辨识的系统就是根据模系统过程的输出误差,利用网 络的算法调节神经元网络的参数。直到模型参数收敛到它们 的期望值。如果神经元网络训练过程要表示系统正向动态, 这种建模方法就叫做正向辨识建模。其结构图示于图6.4。图 中TDL代表具有抽头的延时线,神经元网络与过程平行,系统 与神经网络的预估误差用作网络的训练信号,这种结构也称 为串-并辨识模型。学习的方法是有监督的。教师信号(即系 统的输出)直接向神经网络提供目标值。通过网络将预估误差 直接反传进行训练

u(K) y.(k) 系统 TDA TDL ↑y,(k-n+1) u(k-m+1) e(k) u(k-1) 神经网络 y.(k-1) ,k+1) Z-1 (k) 图6.4正向建模(串-并辨识)结构图 27
27 系 统 神经网络 TDA TDL Z -1 u(K) yp (k) u(k-m+1) u(k-1) yp (k-n+1) yp (k-1) yp (k+1) yp (k) e(k) + - 图6.4正向建模(串-并辨识)结构图
假定所被辨识系统具有以下形 式: y (k+I)=fIy (k).y (k-D).y(k-n+D). u(k),u(飞-1),,k-m+1] (6.17) 式(6.17)是非线性的离散时间差分方程,y,(k+)代表在时 间k+1时刻系统的输出。它是给神经网络提供的教师信号, 它取决于过去n个输出值、过去m个输入值。这里只考虑系统 的动态部分,还没有计入系统所承受的的扰动。 为了系统建模,可将神经网络的输入输出结构选择得与要建 模的系统(6.17)相同,用y表示网络的输出,则神经网络 模型为 y.(k+I)=j(k+1)=fY.(k)y.(k-1).y.(k-n+l) uk),(k-1),,u(k-m+1] (6.18) 28
28 假定所被辨识系统具有以下形 式: ( ), ( 1), , ( 1)] ( 1) [ ( ), ( 1), , ( 1); − − + + = − − + u k u k u k m y k f y k y k y k n p p p p (6.18) 式(6.17)是非线性的离散时间差分方程, 代表在时 间k+1时刻系统的输出。它是给神经网络提供的教师信号, 它取决于过去n个输出值、过去m个输入值。这里只考虑系统 的动态部分,还没有计入系统所承受的的扰动。 为了系统建模,可将神经网络的输入输出结构选择得与要建 模的系统(6.17)相同,用 表示网络的输出,则神经网络 模型为 p y (k +1) m y ( ), ( 1), , ( 1)] [ ( ), ( 1), , ( 1); ˆ ( 1) ˆ ( 1) − − + + = + = − − + u k u k u k m y k y k f y k y k y k n p p p p m (6.17)
如果将图6.4神经网络模型的输入中y。换成ym,模型的输入 是由过程的输入和模型自身的输出反馈构成的,这就是正向 建模的并联连接结构如图6.5所示。其模型的输出可写成 (6.19)的形式。 y.(k+D)=f[y(k).y (k-D)..y(k-n+1) (6.19) u(k),u(k-1)2·,u(k-m+1)] 式中的表示网络输入-输出的映射。 29
29 如果将图6.4神经网络模型的输入中 换成 ,模型的输入 是由过程的输入和模型自身的输出反馈构成的,这就是正向 建模的并联连接结构如图6.5所示。其模型的输出可写成 (6.19)的形式。 y p ym ( ), ( 1), , ( 1)] [ ( ), ( 1), , ( 1); ˆ ( 1) − − + + = − − + u k u k u k m y k f y k y k y k n m m m m (6.19) 式中的表示网络输入-输出的映射
式中表示网络输入一输出的映射。在这种情况下,输 入到网络的量包括了神经网络模型的过去值。虽然 神经网络模型内部还是静态函数,但整体上构成一 个动态系统。在训练时通过对网络的参数调整,使 模型动态映射到输出,从而逼近被测系统的非线性 变化轨线。这种并联辨识的模型,在输入作用下, 可以得到更好的输出预测。在这种意义下,我们称 该模型为常时段预测模型。这种结构的模型比图6.4 结构的模型对非线性特性有更好的逼近能力。图6.5 是一种常用形式。 30
30 式中表示网络输入-输出的映射。在这种情况下,输 入到网络的量包括了神经网络模型的过去值。虽然 神经网络模型内部还是静态函数,但整体上构成一 个动态系统。在训练时通过对网络的参数调整,使 模型动态映射到输出,从而逼近被测系统的非线性 变化轨线。这种并联辨识的模型,在输入作用下, 可以得到更好的输出预测。在这种意义下,我们称 该模型为常时段预测模型。这种结构的模型比图6.4 结构的模型对非线性特性有更好的逼近能力。图6.5 是一种常用形式。 f ˆ