4,1计算机控制系统的稳定性 √线性定常连续系统的稳定的充要条件:闭环极点在$平 面的左半平面内。 线性离散控制系统的稳定性条件 S域到域的央射 线性禽散控制系统稳定的充要条件 线性离散系统的稳定性判据 修正劳斯霍尔维茨稳定判据 一二次项特征方程稳定性的域直接判别法 口 朱利稳定性检验 修尔-科恩稳定判据
4.1 计算机控制系统的稳定性 ✓线性定常连续系统的稳定的充要条件:闭环极点在s平 面的左半平面内。 线性离散控制系统的稳定性条件 ❑ s域到z域的映射 ❑ 线性离散控制系统稳定的充要条件 线性离散系统的稳定性判据 ❑ 修正劳斯-霍尔维茨稳定判据 ❑ 二次项特征方程稳定性的z域直接判别法 ❑ 朱利稳定性检验 ❑ 修尔-科恩稳定判据
S域到z域的映射 我们将S平面映射到z平面,并找出离散系统稳定时 其闭环脉中传递函数零、极点在平面的分布规律,从而 获得离散系统的稳定判据。令 S=0+j0 则有 z=e=eo+jo=eo.eo=eo.e7o+2,k=0,士l,t2,… 于是,S域到z域的基本映射关系式为 z-e"o,0=To
s域到z域的映射 我们将s平面映射到z平面,并找出离散系统稳定时 其闭环脉冲传递函数零、极点在z平面的分布规律,从而 获得离散系统的稳定判据。令 则有 于是,s域到z域的基本映射关系式为 s = + j ( j ) j j( 2 ) e e e e e e , 0, 1, 2, Ts T T T T T k z k + + = = = = = = = e , T z T
=eto, 0=T0 S域到z域的映射 S平面左半平面的垂直线对应于z平面半径小于的圆 √S平面右半平面的垂直线对应于z平面半径大于1的圆 √S平面的虚轴在z平面的映射为一单位圆 √平面水平直线对应于z平面具有相应角度的直线 √S平面的等阻尼线对应z平面的螺旋线 jImz j仙 j0s/2 jlmz↓ j02 W2T rez jo1 T 0 0 Rez (a) 6) Rez (c) 图4.1S域与z域映射关系图
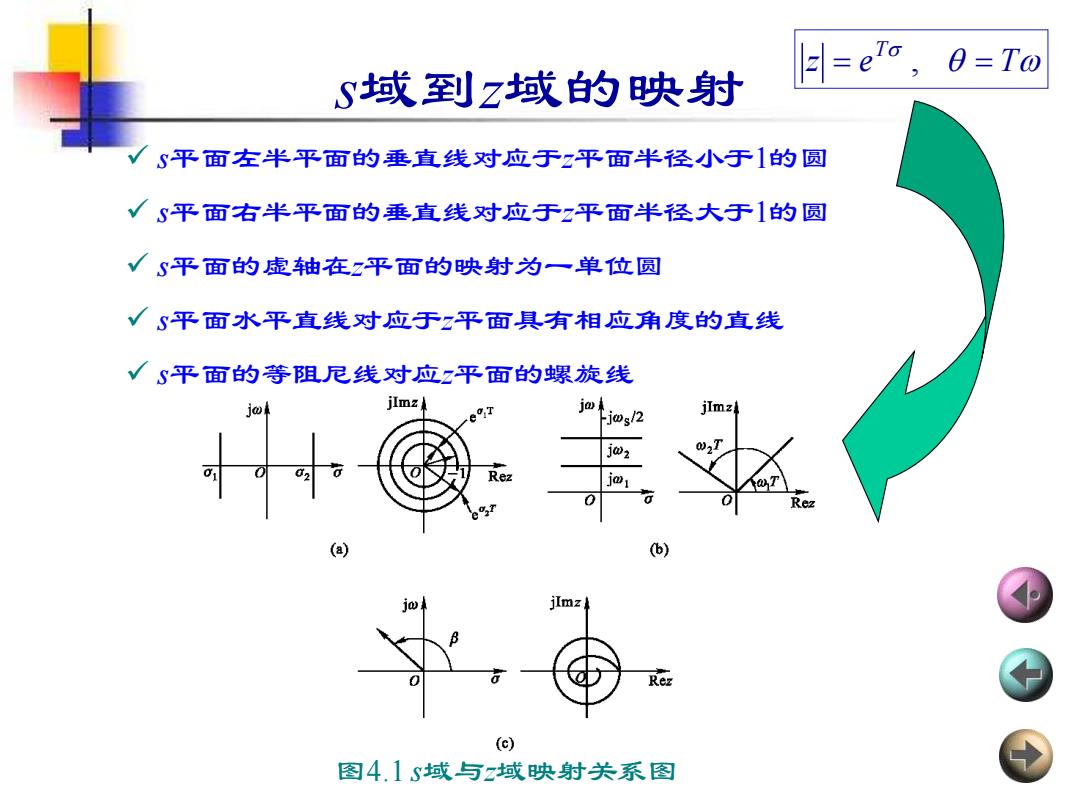
✓ s平面左半平面的垂直线对应于z平面半径小于1的圆 ✓ s平面右半平面的垂直线对应于z平面半径大于1的圆 ✓ s平面的虚轴在z平面的映射为一单位圆 ✓ s平面水平直线对应于z平面具有相应角度的直线 ✓ s平面的等阻尼线对应z平面的螺旋线 s域到z域的映射 图4.1 s域与z域映射关系图 z e T T = , =

S域到z域的映射 由于左半平面的为负值,所以左半S平面对应于 |z|=es<1 S平面的虚轴表示实部G0和虚部0从-0变到十0,映射到z平面上,表 示|z|=eTo=e=1,即单位圆上,0=T0也从-0o变到+o0,即z在单位圆 上逆时针旋转无限多圈。简单地说,就是S平面的虚轴在z平面的映射 为一单位圆,如图4.2所示。 jw j江mz 8平面 z平面 Res 图4.2S平面与2平面的映射关系
s域到z域的映射 图4.2 s平面与z平面的映射关系 由于左半平面的σ为负值,所以左半s平面对应于 |z|=e Tσ<1 s平面的虚轴表示实部σ=0和虚部ω从-∞变到+∞,映射到z平面上,表 示|z|=eTσ=e0=1,即单位圆上,θ=Tω也从-∞变到+∞,即z在单位圆 上逆时针旋转无限多圈。简单地说,就是s平面的虚轴在z平面的映射 为一单位圆,如图4.2所示
线性离散控制系统 稳定的充要条件 图4.3所示线性窝散控制系统的闭环脉冲传递函数①(2) 为 Y(z) G(z) D(2)= R(z)1+MG(2) 特征方程为 1+MG(z)=0 R(s) G(s) Y(s) M(s) 图4.3线性离散控制系统
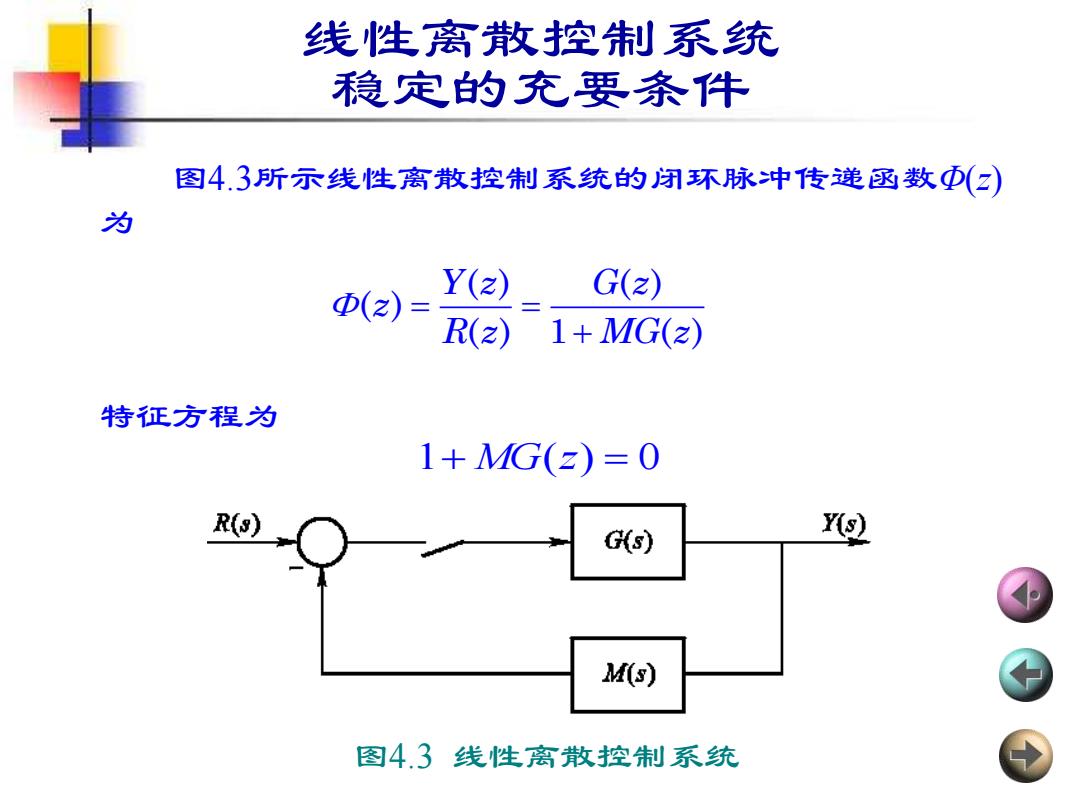
线性离散控制系统 稳定的充要条件 图4.3所示线性离散控制系统的闭环脉冲传递函数Φ(z) 为 特征方程为 = = + ( ) ( ) ( ) ( ) 1 ( ) Y z G z z R z MG z 1+ MG(z) = 0 图4.3 线性离散控制系统