二、步进电机的运行方式1.三相三拍运行方式(1)当A相通电时,B相、C相不通电:(通电后磁场A相定子上的齿与转子上的齿对齐力作用的结果),迫使电机旋转3°B相定子上的齿顺时针超前转子上相应的齿3°C相定子上的齿顺时针超前转子上相应的齿6:6
6 9 二、步进电机的运行方式 1.三相三拍运行方式 (1)当A相通电时,B相、C相不通电: A相定子上的齿与转子上的齿对齐(通电后磁场 力作用的结果),迫使电机旋转3° B相定子上的齿顺时针超前转子上相应的齿3° C相定子上的齿顺时针超前转子上相应的齿6°
(2)当B相接通电时,A相、C相不通电:B相齿对齐,电机旋转3°;C相超前3°A相超前6°O(3)当C相通电时,B相、A相不通电。C相齿对齐,电机旋转3°;OA相超前3°;B相超前6°9
9 7 (2)当B相接通电时,A相、C 相不通电: B相齿对齐,电机旋转3° ; C相超前3°A相超前6° (3)当C相通电时,B相、A相 不通电。 C相齿对齐,电机旋转3° ; A相超前3°;B相超前6°
因此,如果定子A、B、C三相按A-→B-→C→A的顺序依次通电,则步进电机将不断地按顺时针方向转动。每一次通电转3°,每三次通电才走完一个齿距,因此叫三相三拍。每一次通电转动的固定角叫步距角α。显然,三相三拍运行时,步距角α=3。°8
8 9 因此,如果定子A、B、C三相按 A→B→C→A 的顺序依次通电,则步进电机将不断地按顺时 针方向转动。每一次通电转3° ,每三次通电 才走完一个齿距,因此叫三相三拍。 每一次通电转动的固定角叫步距角。 显然,三相三拍运行时,步距角=3°
假如某次通电后,控制脉冲不再来,则电机转子齿和某相对齐后就停止转动,叫做位状态如果把顺时针叫正转,那么当通电顺序按A-→C→B-→A进行时,则电机反时针旋转,叫反转。可见控制步进电机正转反转只是三相绕组通电顺序不同而已9
9 9 假如某次通电后,控制脉冲不再来,则电机转 子齿和某相对齐后就停止转动,叫做位状态。 如果把顺时针叫正转,那么当通电顺序按 A→C→B→A 进行时,则电机反时针旋转,叫反转。 可见控制步进电机正转反转只是三相绕组通电 顺序不同而已
2.三相六拍运行方式当A相通电时,A相定子齿与转子齿对齐,此后,如果让A、B两相同时通电,可以发现转子转动1.5°。再让A相断电、2壁子B相通电,又可发现转子再转1.5°。所5以按照一转子ZA→AB-B-BC-→C-→CA→A工A的顺序控制,电机将按顺时针方向旋转,图9-1(a)三必进电机精热尔定每步转动1.5°,即步距角α=1.5°,由于要经过6步才走完一个齿距(6×1.5°=9°),所以叫三相六拍。910
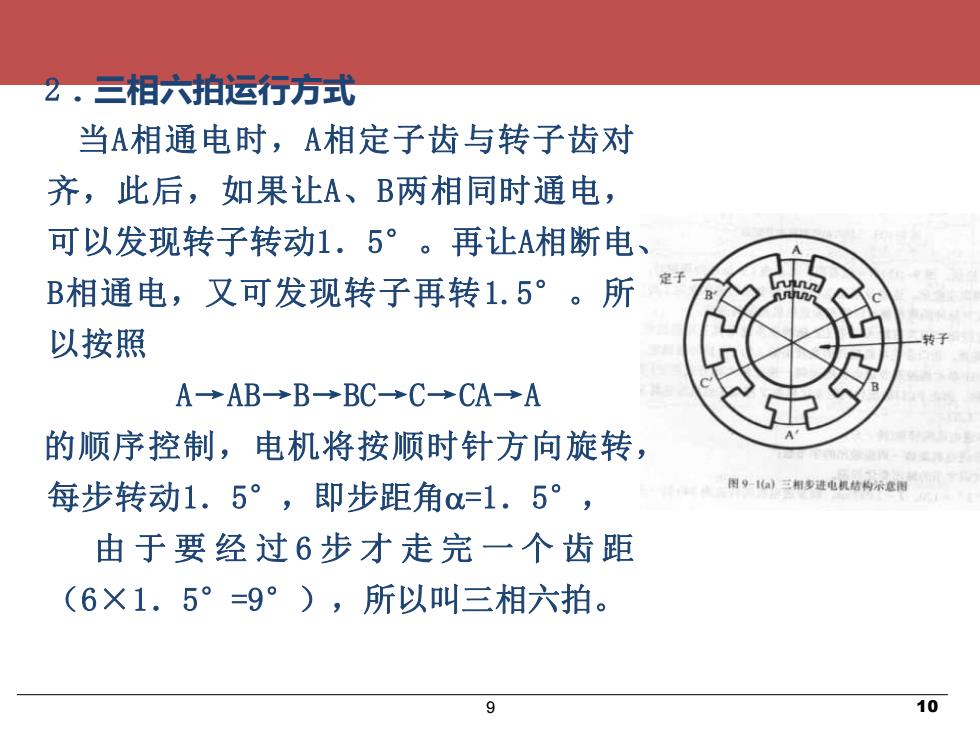
9 10 2.三相六拍运行方式 当A相通电时,A相定子齿与转子齿对 齐,此后,如果让A、B两相同时通电, 可以发现转子转动1.5° 。再让A相断电、 B相通电,又可发现转子再转1.5° 。所 以按照 A→AB→B→BC→C→CA→A 的顺序控制,电机将按顺时针方向旋转, 每步转动1.5° ,即步距角=1.5° , 由 于 要 经 过 6 步 才 走 完 一 个 齿 距 (6×1.5°=9°),所以叫三相六拍