TURING 图灵电子与电气工程丛书 WILEY 锁相环技术 Phaselock Techniques (第3版) Third Edition [美]Floyd M.Gardner 著 WILEY 姚剑清 译 Phaselock Techniques Third Edition Floyd M.Gardner 锁相环 “圣经” 最新版! 人民邮电出版社 POSTS TELECOM PRESS
前 言 本书第1版是1966年出版的,第2版于1979年问世。1966年,锁相技术是一门难 以想象的神奇技术,其应用范围有限,做这项技术的人几乎没有。现在的锁相技术已 经成熟:在全世界的大量电子器件内都有锁相环;无数的应用中都有锁相环;许多人在 继续研发锁相技术。在本书第1版问世的时候,还没有其他关于锁相环的书,可今天 这样的书已经超过了20本。那么,为什么要在这个时候写第3版呢? 在1966年,锁相技术是一件新奇事物,那时的读者需要一本简短的入门性书籍。 而今天的锁相环已经成为电子工程中的主流器件。同时,这些年来锁相环方面积累了 大量的新概念,曾经非常重要的内容已经不再那么重要了。经验告诉我,前2版书中 的有些内容还应当修改。 我们已经不需要再写一本人门性的书了,因为1.3节中列出的几本书中都有极好 的论述,而且也许还有其他的书。本书对传统锁相技术重新进行了更深刻的考察,并 增加了许多新内容,其中有些是从未发表过的。增加的内容包括:对传递函数的重新 组织和扩充,关于相位噪声的两章,关于数字锁相环的两章,关于电荷泵锁相环的一 章,对检相器内容的扩充,以及关于异常锁定的一章。 与前两版一样,电路只占极小的篇幅。本书的重点是讲基本原理,因为基本原理 不会因技术进步而过时,而电路的实现方法是日新月异的。第2版中的一些内容被删 去了,这些删除的内容包括优化与同步的章节和数学附录等。形式上的优化对设计的 重要性并不像原来想象的那么好,设计者更愿意对实际锁相环中为数不多的几个参数 进行权衡与折中:删去了数学附录,是因为书中所要求的数学难度不会超过所有电子 工程类大学毕业生的水平。同步(从数据信号中恢复载波与时钟)本身是一大课题,随 着它的发展,读者一定会觉得这些内容包含在一本关于锁相环的书中是不合适的。 17.1节中有关于同步的简单介绍。 仿真是本书未涉及的另一个课题。本书的几章中关于仿真的内容取自具体的仿 真实验,有些新的数据只能通过仿真才可得到,仿真又是C设计与验证的关键。但本 书并没有说明如何进行锁相环仿真。关于仿真的内容值得单独写一本书,如果把仿真 也包含在本书中,内容就有些太多了。 这些年来,全世界出现了数以千计关于锁相技术的文章和书籍,我不可能一一列 举。虽然本书的各章中已经包含了许多有关的文献,但仍有遗漏之处。而且,在经历 了这么多年的工作之后,也很难记起每门技术当初是由谁提出的。我对未能提及的同 仁表示歉意,这样的疏漏不是有意的。 本书在选择参考文献时遵循了几个原则:文献应是原创的:它应该尽可能是公开
2前言 发表的、存档的出版物;它所论述的是原理性的,而不是只流行一时的电路实现。读者 会看到,绝大部分的参考文献来自EEE和在美国出版的书籍。这些文献既反映了 IEEE出版物的无处不在,也反映了我个人藏书的情况。 我要感谢我的客户们,在这些年里是他们给了我这么多学习锁相这门神奇技术的 机会。 Floyd M.Gardner 加利福尼亚州,帕洛阿尔托市 台故是 装
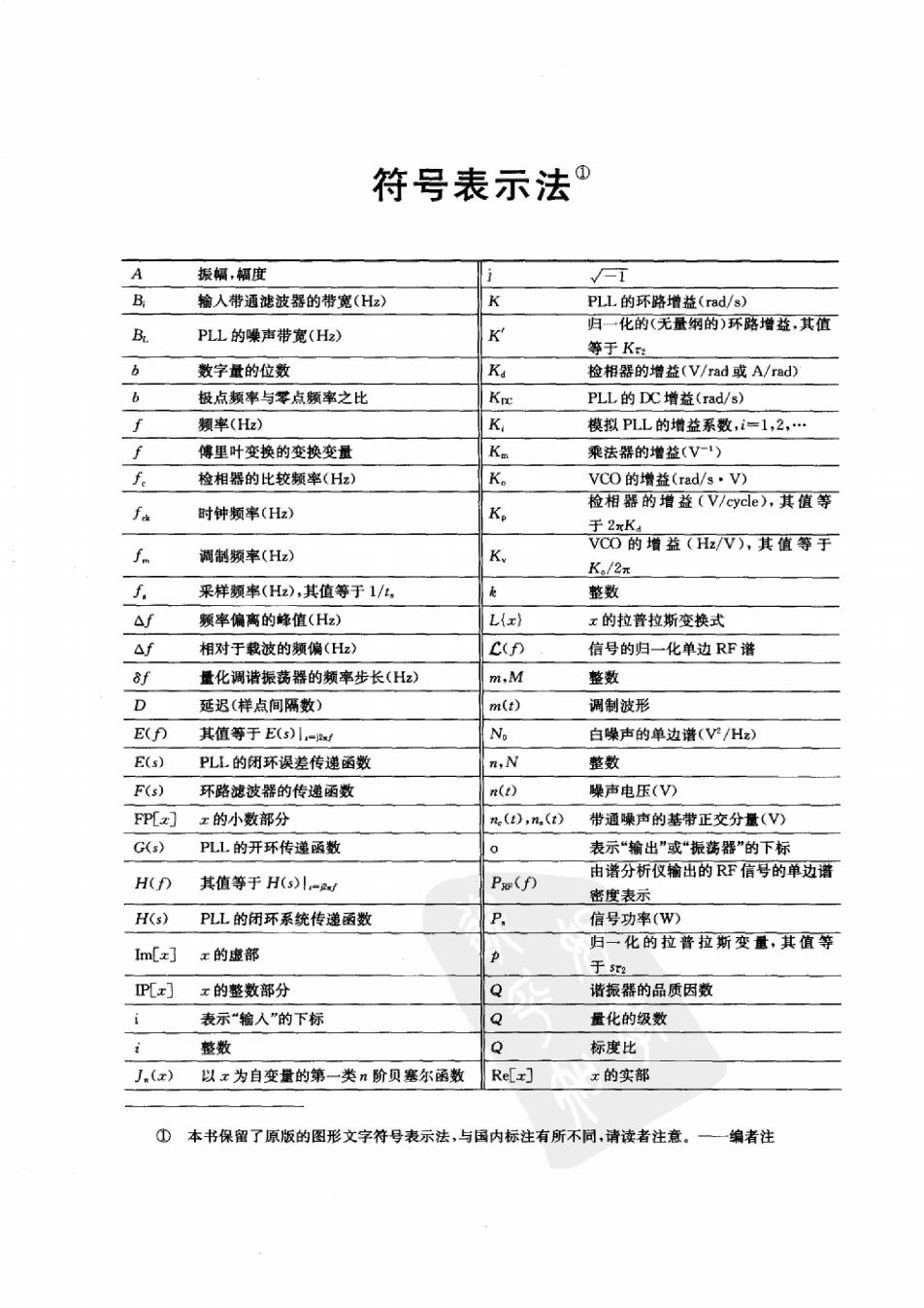
符号表示法 A 振幅,幅度 √-I B 输入带通滤波器的带宽(Hz) K PLL的环路增益(rad/s) PLL的噪声带宽(Hz) K 归一化的(无量纲的)环路增益,其值 B 等于K b 数字量的位数 K4 检相器的增益(V/rad或A/rad) b 极点频率与零点频率之比 Kre PLL的DC增益(rad/s) 频率(Hz) K 模拟PLL的增益系数,i=1,2,… f 傅里叶变换的变换变量 Km 乘法器的增益(V) fe 检相器的比较频率(Hz) K。 VCO的增益(rad/s·V) 检相器的增益(V/cycle),其值等 fa 时钟频率(Hz) Ko 于2xK VCO的增益(Hz/V),其值等于 f 调制频率(Hz) K K./2x f 采样频率(Hz),其值等于1/:, 整数 △f 频率偏离的峰值(Hz) L(z) x的拉普拉斯变换式 △f 相对于载波的颜偏(Hz) C(f 信号的归一化单边RF谱 8f 量化调谐振荡器的频率步长(Hz) m,M 整数 D 延迟(样点间隔数) m(t) 调制波形 E(f) 其值等于E(s)l,- N 白噪声的单边谱(Vr/Hz) E(s) PLL的闭环误差传递函数 n,N 整数 F(s) 环路滤波器的传递函数 n(t) 噪声电压(V) FPLz] x的小数部分 元(t),m(t) 带通噪声的基带正交分量(V) G(s) PLL的开环传递函数 表示“输出”或“振荡器”的下标 由谱分析仪输出的RF信号的单边谱 H(f) 其值等于H(s)l-d P(f) 密度表示 H(s) PLL的闭环系统传递函数 P 信号功率(W) 归一化的拉普拉斯变量,其值等 Im[x]x的虚部 心 于5r2 IP[x] x的整数部分 Q 谐振器的品质因数 表示“输入”的下标 Q 量化的级数 整数 Q 标度比 J.(x)以x为自变量的第一类n阶贝塞尔函数 Re[z] x的实部 ①本书保留了原版的图形文字符号表示法,与国内标注有所不同,请读者注意。一编者注
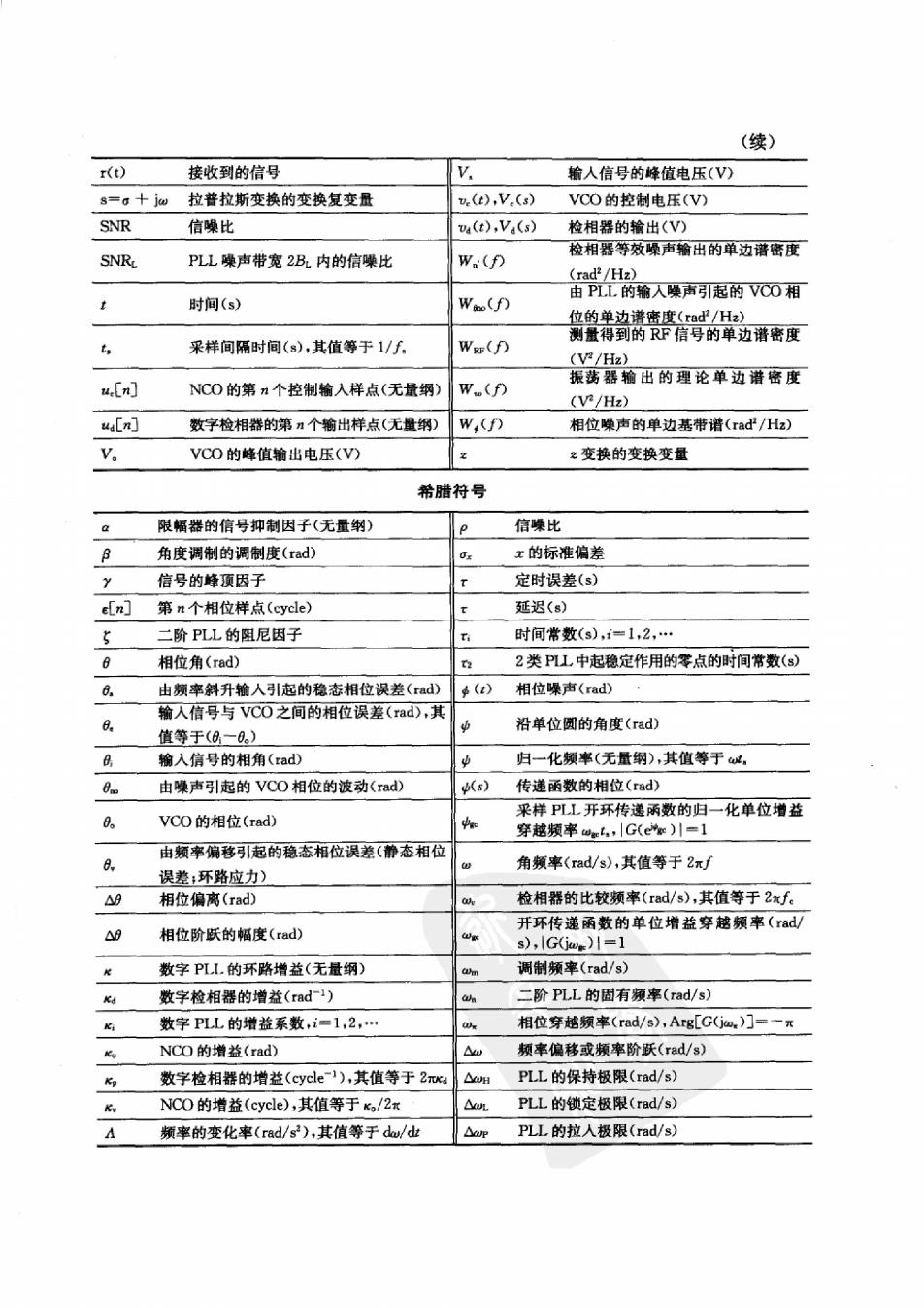
(续) r(t) 接收到的信号 输人信号的峰值电压(V) s=。十jw拉普拉斯变换的变换复变量 u.(t),V.(s) VCO的控制电压(V) SNR 信噪比 va(t),Va(s) 检相器的输出(V) 检相器等效噪声输出的单边谱密度 SNR PLL噪声带宽2B内的信噪比 W(f) (rad2/Hz) 由PL.L的输人噪声引起的VCO相 时间(s) Woe(f) 位的单边谱密度(rad/Hz) 测量得到的RF信号的单边谱密度 g 采样间隔时间(s),其值等于1/f WRE(f) (V/Hz) 振荡器输出的理论单边谐密度 ue[n] NCO的第n个控制输入样点(无量纲) w..(f) (V/Hz) ua[n] 数字检相器的第刀个输出样点(无量纲) w,(p 相位噪声的单边基带谱(rad/Hz) V. VCO的峰值输出电压(V) 之变换的变换变量 希腊符号 a 限幅器的信号抑制因子(无量纲) 信噪比 B 角度调制的调制度(rad) Gz x的标准偏差 信号的峰顶因子 定时误差(s) e[n]第n个相位样点(cycle) 延迟(s) 5 二阶PLL的阻尼因子 T 时间常数(s),=1,2,… 相位角(rad) 2类PL中起稳定作用的零点的时间常数(s) 由频率斜升输人引起的稳态相位误差(rad) ()相位噪声(rad 输人信号与VCO之间的相位误差(rad),其 8 沿单位圆的角度(rad) 值等于(0-0.) 输入信号的相角(rad) 归一化频率(无量纲),其值等于, Goo 由噪声引起的VCO相位的波动(rad) () 传递函数的相位(rad) 采样PL开环传递函数的归一化单位增益 6. VCO的相位(rad) 穿越频率wacb,|G(c)l=1 由频率偏移引起的稳态相位误差(静态相位 8. 角频率(rad/s),其值等于2xf 误差:环路应力) 9 相位偏离(rad) 检相器的比较频率(rad/s),其值等于2x∫。 △0 相位阶跃的幅度(rad) 开环传递函数的单位增益穿越频率(rad/ s),G(iw)=1 数字PLL的环路增益(无量纲) 调制频率(rad/s) 数字检相器的增益(rad1) an 二阶PLL的固有频率(rad/s) 数字PL的增益系数,i=1,2,… 相位穿越颜率(rad/s),Arg[G(ja.)门=一π NCO的增益(rad) △w 频率偏移或频率阶跃(rad/s) 数字检相器的增益(cycle1),其值等于2a w阳 PLL的保持极限(rad/s) NCO的增益(cycle),其值等于k/2r △L PLL的锁定极限(rad/s) 频率的变化率(rad/s),其值等于daw/d △wp PLL的拉入极限(rad/s)