先进控制理论与控制工程 中国地质大学自动化学院吴敏 第四讲: 二维重复控制与主动扰动抑制 98 2021年9月13日
98 2021年9月13日 二维重复控制与主动扰动抑制 第四讲: 先进控制理论与控制工程 吴 敏

先进控制理论与控制工程 中固地质大芳自动化学院吴敏 基于二维模型的鲁棒重复控制 >重复控制问题 >重复控制研究的基本情况 >重复控制的二维模型 >典型的重复控制系统设计 >今后的研究课题 99 2021年9月13日
99 2021年9月13日 重复控制问题 重复控制研究的基本情况 重复控制的二维模型 典型的重复控制系统设计 今后的研究课题 基于二维模型的鲁棒重复控制 先进控制理论与控制工程 吴 敏
先进控制理论与控制工程 中固地质大芳自动化学院吴敏 School of Aut 重复控制问题 高精度跟踪给定周期信号和有效抑制周期扰动信号 >理论提出:在20世纪80年代,为了实现质子加速器励磁电源中周期电流和电压的高精度控 制,日本东京工业大学中野道雄研究小组提出了重复控制方法 >工业需求: 在工业应用中,很多系统需要高精度跟踪或抑制周期性激励信号,例如伺服系统和电 力电子系统 √在实际控制系统中,往往存在诸如参数摄动、未建模动态、外部扰动和机械结构非线 性等不确定因素 100 2021年9月13日
100 2021年9月13日 理论提出:在20世纪80年代,为了实现质子加速器励磁电源中周期电流和电压的高精度控 制,日本东京工业大学中野道雄研究小组提出了重复控制方法 工业需求: 在工业应用中,很多系统需要高精度跟踪或抑制周期性激励信号,例如伺服系统和电 力电子系统 在实际控制系统中,往往存在诸如参数摄动、未建模动态、外部扰动和机械结构非线 性等不确定因素 重复控制问题 高精度跟踪给定周期信号和有效抑制周期扰动信号 先进控制理论与控制工程 吴 敏
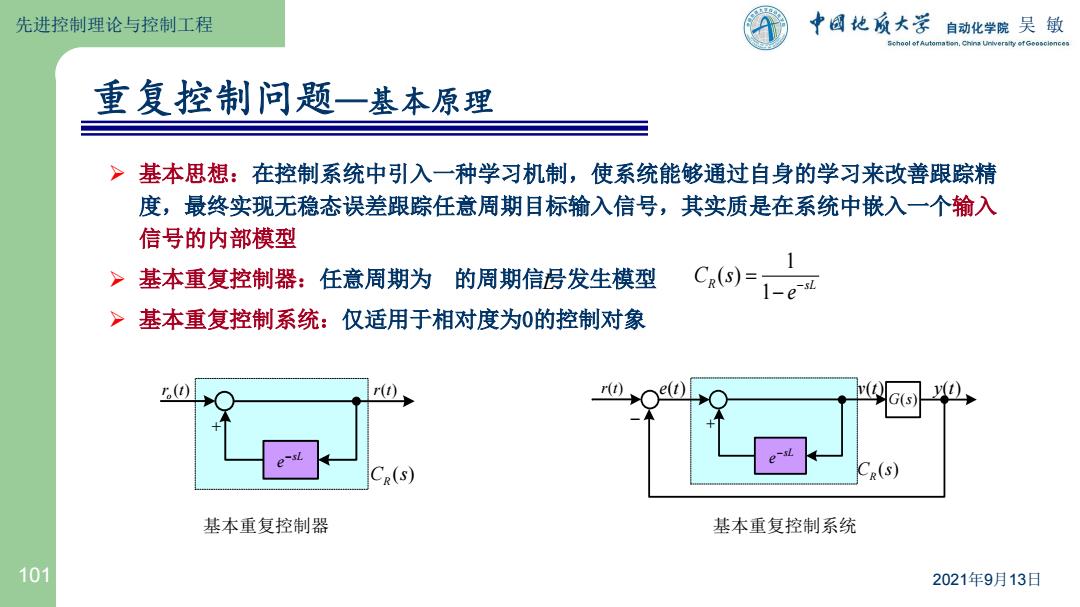
先进控制理论与控制工程 中固地质大学 自动化学院吴敏 重复控制问题一基本原理 >基本思想:在控制系统中引入一种学习机制,使系统能够通过自身的学习来改善跟踪精 度,最终实现无稳态误差跟踪任意周期目标输入信号,其实质是在系统中嵌入一个输入 信号的内部模型 >基本重复控制器:任意周期为的周期信房发生模型 CR(S)= 1-e-st >基本重复控制系统:仅适用于相对度为0的控制对象 r(t) e(t) G)D CR(s) CR(5) 基本重复控制器 基本重复控制系统 101 2021年9月13日
101 2021年9月13日 基本思想:在控制系统中引入一种学习机制,使系统能够通过自身的学习来改善跟踪精 度,最终实现无稳态误差跟踪任意周期目标输入信号,其实质是在系统中嵌入一个输入 信号的内部模型 基本重复控制器:任意周期为 的周期信号发生模型 基本重复控制系统:仅适用于相对度为0的控制对象 () or t rt()( ) C s R sL e - 1 ( ) 1 R sL C s e - - rt() e(t) v(t) y(t) ( ) C s R G s( ) - sL e - 基本重复控制器 基本重复控制系统 重复控制问题—基本原理 L 先进控制理论与控制工程 吴 敏
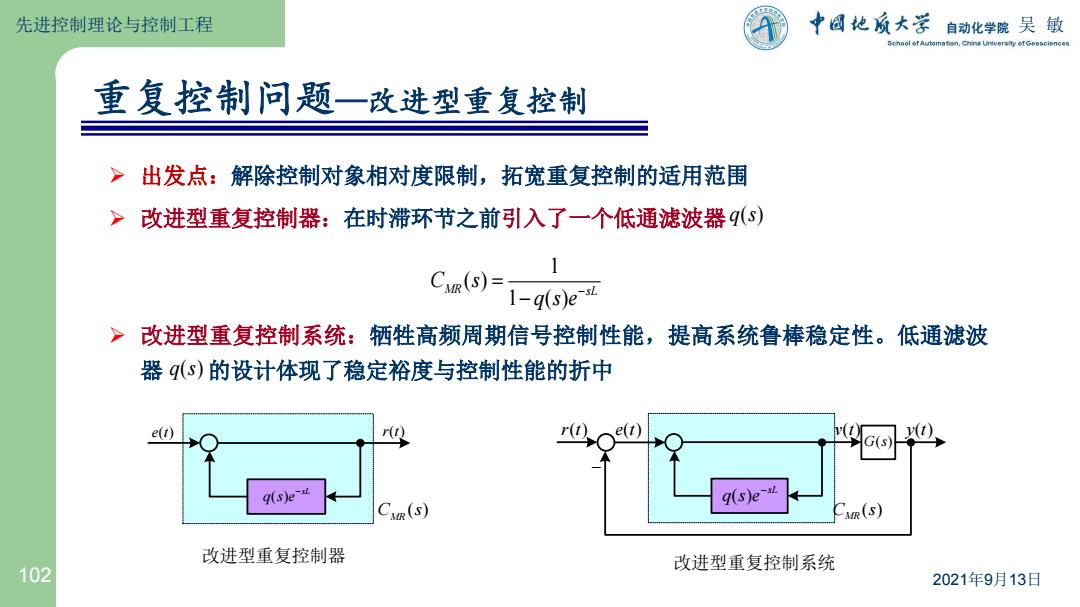
先进控制理论与控制工程 中圆记质大芳自动化学院吴敏 重复控制问题一改进型重复控制 >出发点:解除控制对象相对度限制,拓宽重复控制的适用范围 > 改进型重复控制器:在时滞环节之前引入了一个低通滤波器q(s) CuR(s)= -g(s)e-sL >改进型重复控制系统:牺牲高频周期信号控制性能,提高系统鲁棒稳定性。低通滤波 器q(s)的设计体现了稳定裕度与控制性能的折中 r(t e(t) G四 q(s)e- q(s)e- C(5) MR(S) 改进型重复控制器 102 改进型重复控制系统 2021年9月13日
102 2021年9月13日 出发点:解除控制对象相对度限制,拓宽重复控制的适用范围 改进型重复控制器:在时滞环节之前引入了一个低通滤波器 改进型重复控制系统:牺牲高频周期信号控制性能,提高系统鲁棒稳定性。低通滤波 器 的设计体现了稳定裕度与控制性能的折中 改进型重复控制器 改进型重复控制系统 et() rt() ( ) C s MR ( ) sL q s e - 1 ( ) 1 ( ) MR sL C s q s e - - q s( ) 重复控制问题—改进型重复控制 r(t) e(t) v(t) y(t) ( ) C s MR G s( ) sL q s e - ( ) - q s( ) 先进控制理论与控制工程 吴 敏