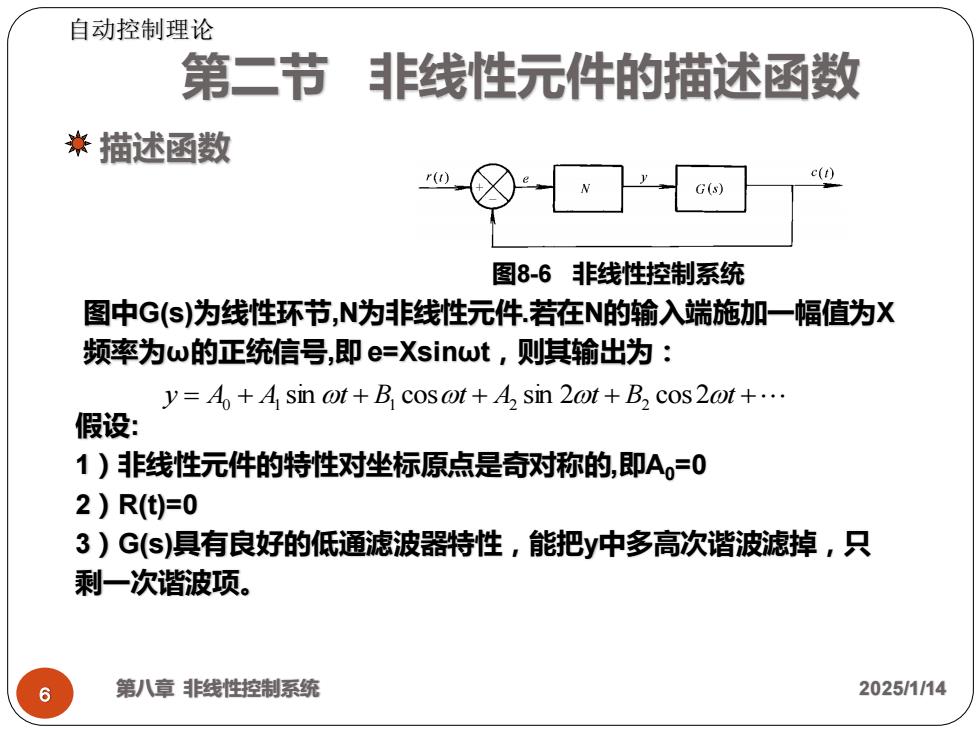
自动控制理论 第二节 非线性元件的描述函数 米描述函数 r(0 e(t) G( 图8-6非线性控制系统 图中G(S)为线性环节,为非线性元件.若在N的输入端施加一幅值为X 频率为w的正统信号,即e=Xsinwt,则其输出为: y=A+4 sin ot+B cosot+4 sin 2ot+B2 cos2ot+. 假设: 1)非线性元件的特性对坐标原点是奇对称的,即A,=0 2)R()=0 3)G(s)具有良好的低通滤波器特性,能把y中多高次谐波滤掉,只 剩一次谐波项。 第八章非线性控制系统 2025/1/14
y = A0 + A1 sin t + B1 cost + A2 sin 2t + B2 cos2t + 第八章 非线性控制系统 2025/1/14 6 描述函数 图8-6 非线性控制系统 图中G(s)为线性环节,N为非线性元件.若在N的输入端施加一幅值为X 频率为ω的正统信号,即 e=Xsinωt,则其输出为: 第二节 非线性元件的描述函数 假设: 1)非线性元件的特性对坐标原点是奇对称的,即A0=0 2)R(t)=0 3)G(s)具有良好的低通滤波器特性,能把y中多高次谐波滤掉,只 剩一次谐波项。 自动控制理论
自动控制理论 则 Jy=A sin ot-+B,cos@t=Ysin(ot+Φ,) 其中 ==arctan ysiawtd(ot)) B= ycosotd(ot) 经过线性化处理后,非线性元件的输出是一个与其输入信号同频率的 正弦函数,仅在幅值和相位上与输入信号有差异。 非线性特性线性化的条件: 1)假设系统的输入)=0 2)非线性元件的静特性不是时间t的函数 3)非线性元件的特性是奇对称的,即有 f(e)=-f(-e) 第八章非线性控制系统 2025/1/14
( ) 1 1 1 1 y = A sint + B cost =Y sin t + ( ) B y td( t) A ysia td t A B Y A B cos 1 1 , arctan 2 0 1 2 0 1 1 1 1 2 1 2 1 1 = = = + = 第八章 非线性控制系统 2025/1/14 7 则 其中 经过线性化处理后,非线性元件的输出是一个与其输入信号同频率的 正弦函数,仅在幅值和相位上与输入信号有差异。 非线性特性线性化的条件: 1)假设系统的输入r(t)=0 2)非线性元件的静特性不是时间t的函数 3)非线性元件的特性是奇对称的,即有 f (e)= − f (−e) 1 1 自动控制理论