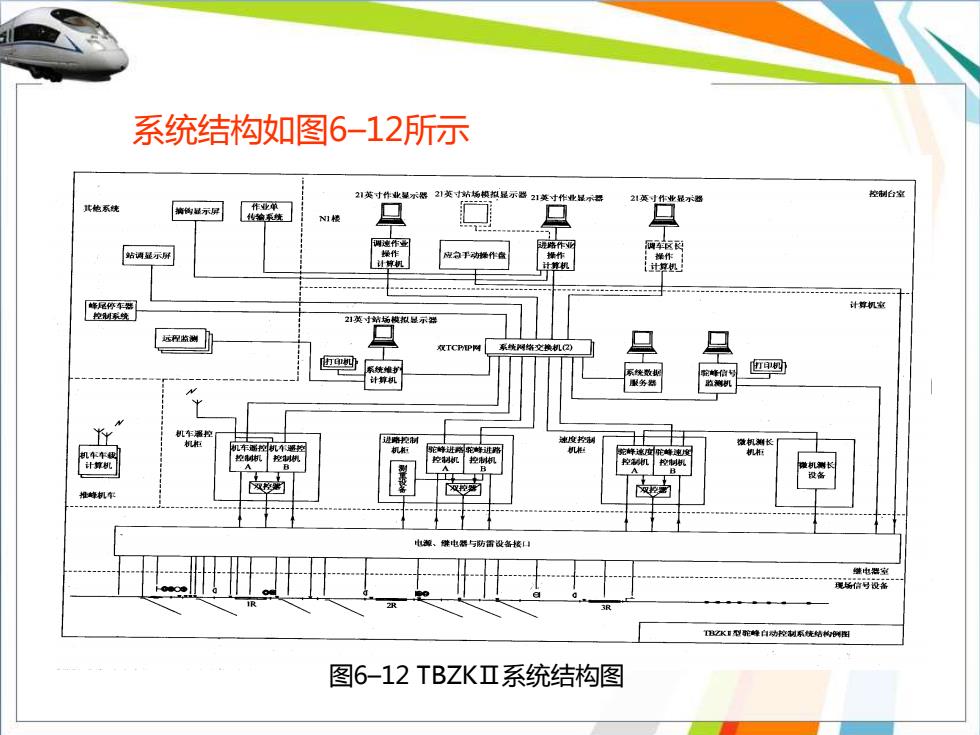
系统结构如图6-12所示 控制白室 其他系 摘陶显示屏 站调显示研 園 计算机名 双TCPP 计算机 峰机有 电器 现场信可设备 TB☑K卫和罪蜂白动控制系统站图 图6-12TBZKⅡ系统结构图
系统结构如图6–12所示 图6–12 TBZKⅡ系统结构图
日)系统的特点 (1)系统结构简单合理。 TBZKⅡ型控制系统可以划分为两层。 第一层是双机热备的控制机柜;第二层是进路作业机、 速度作业机、数据服务器和电务维修机。 层间采用以太网通信,简化了通信管理逻辑和通信管理 软件,既提高了系统的可靠性,也便于维护。 (2)双机热备。 控制系统中所有控制计算机均采用双机双通道的完全热 备方式。控制计算机既可选择双机热备,也可选择冷备工作 方式。在冷备工作方式下,可对备机进行离线检测,不会影 响控制系统的正常工作
㈡系统的特点 (1)系统结构简单合理。 TBZKⅡ型控制系统可以划分为两层。 第一层是双机热备的控制机柜;第二层是进路作业机、 速度作业机、数据服务器和电务维修机。 层间采用以太网通信,简化了通信管理逻辑和通信管理 软件,既提高了系统的可靠性,也便于维护。 (2)双机热备。 控制系统中所有控制计算机均采用双机双通道的完全热 备方式。控制计算机既可选择双机热备,也可选择冷备工作 方式。在冷备工作方式下,可对备机进行离线检测,不会影 响控制系统的正常工作
(3)双以太网冗余。 控制系统中所有CPU均采用双以太网冗余技术。双网同 时工作,任一网络故障,均不会影响系统正常工作。 (4)实时多任务操作系统。 控制系统采用实时INUX操作系统,杜绝了因软件原因 造成的“死机”现象,提高了系统的可靠性。 (5)精细跟踪技术。 系统以峰下每一组分路道岔、减速器、雷达、踏板为计 算点,依据站场横、纵坐标精确测定和跟踪车组的位置、间 隔及其变化趋势。 为各部位调速、 侧撞、途停提供准确依据
(3)双以太网冗余。 控制系统中所有CPU均采用双以太网冗余技术。双网同 时工作,任一网络故障,均不会影响系统正常工作。 (4)实时多任务操作系统。 控制系统采用实时LINUX操作系统,杜绝了因软件原因 造成的“死机”现象,提高了系统的可靠性。 (5)精细跟踪技术。 系统以峰下每一组分路道岔、减速器、雷达、踏板为计 算点,依据站场横、纵坐标精确测定和跟踪车组的位置、间 隔及其变化趋势。 为各部位调速、侧撞、途停提供准确依据
(6)数据库技术。 控制系统采用了MY-SQL数据库技术、可以完成海量 数据的存储、检索。 (7)远程访问。 利用系统提供的调制解调器,通过电话线可以在异地 远程访问系统,检索、查询数据。也可以回放再现溜放过 程。远程访问可在任意工作时段进行。 (8)无通信阻塞。 控制系统采用较高级的操作系统、双以太网冗余技术 及高水平的网络管理技术,避免了通信阻塞现象
(6)数据库技术。 控制系统采用了MY-SQL数据库技术、可以完成海量 数据的存储、检索。 (7)远程访问。 利用系统提供的调制解调器,通过电话线可以在异地 远程访问系统,检索、查询数据。也可以回放再现溜放过 程。远程访问可在任意工作时段进行。 (8)无通信阻塞。 控制系统采用较高级的操作系统、双以太网冗余技术 及高水平的网络管理技术,避免了通信阻塞现象
二、系统的功能和主要技术指标 (一系统的功能和指标 (1)系统可满足双推双溜、双推单溜、 单推单溜的驼峰作 业要求。 (2)系统分为驼峰进路控制、溜放速度控制、推峰机车控 制三大部分。 根据不同驼峰的需要,各部分既可以单独构成系 统,也可以随意组合构成不同的驼峰控制系统。 (3)系统可以满足日解体6000辆以上,平均推峰速度不 低于55km/h的驼峰作业要求。 (4)系统的各控制计算机均采用双机完全热备,可靠性高
二、系统的功能和主要技术指标 ㈠系统的功能和指标 (1)系统可满足双推双溜、双推单溜、单推单溜的驼峰作 业要求。 (2)系统分为驼峰进路控制、溜放速度控制、推峰机车控 制三大部分。 根据不同驼峰的需要,各部分既可以单独构成系 统, 也可以随意组合构成不同的驼峰控制系统。 (3)系统可以满足日解体6000辆以上,平均推峰速度不 低于5·5㎞/h的驼峰作业要求。 (4)系统的各控制计算机均采用双机完全热备,可靠性高