界,它只是由变动的和不实在的“动画片”(译注:指骤然发生和变动 不居的东西)所组成,出现后就完全消失,不再发生,或是以改变 的、类似的形式再现。在约五至七个月(婴儿的第三阶段),当儿童正 要抓住一个客体(物体)时,你用一块布把它盖住,或把它移到幕布 后面,他只是缩回他已伸出的手,如果客体是他心爱的东西(例如 他的奶瓶),他就因失望而大哭大叫。从他的反应来看,客体好象已 消失了;或许他对已消失的客体虽是知道它仍存在原处,但他不能 有效地寻找这客体,也不能移开这块幕布。当他开始注视幕布下面 时(参阅前面第四阶段),你可按下法做一实验。把客体戴在儿童 右边的A处,儿童找寻着,并立即找到:然后,在儿童眼前,移动这 客体,把它裁在儿童左边的B处。当儿童看到B处的客体不见时 (放在坐垫下面),经常发生的是,他在A处寻找,好象客体的位置 依赖于他过去曾经成功地找到过的地方,而不依赖于地点的改变 (这改变并非由儿童自己的动作所引起)。但到第五阶段(九到十 个月),对客体的寻找则依据位置的移动,除非“位移”过于复杂(例 如幕布后面还有幕布)。到第六阶段,能利用推想有效地掌握某些 联合动作。(例如,当拿起坐垫时,看不到什么东西,只发现另一块 意想不到的幕布,这时儿童会立即移开这幕布,取得物体。)① 客体的守恒依存于客体的定位;即是说,儿童既知道客体消失 时并非不存在,同时也知道客体往何处去。这事实表明永久客体 的图式的形成是同实际世界的整个空间-时间组织和因果性组织 密切联系着的。 ①格鲁伯(H.Gruber)对小猫进行了同样问题的研究。小猫经历了大致相同的 阶段,但早在三个月的时候小猫就开始有了客体的永久性。在这一点上正象许多其它 方面一样,人类婴儿比起小动物来是落后的,但这种落后恰恰证明了人类具有更加复 杂的同化作用,因为婴儿日后的发展能够远远地超过动物。 13
1 二、空间和时间 首先谈空间-时间结构,我们观察到在开始时儿童并不存在 含有以物体和事件作为内容(如容器含有它的内容一样)的单纯的 空闻或时间次序,而是存在着几种完全以儿童自已身体为中心的 杂凑的空间一如口部的、触觉的、视觉的、听觉的和体态的空 间一以及某些时间印象(如在时间上等候妈妈等),但没有客体 间的协调。这些不同堂间随后逐渐协调起来(例如口部的空间和 触党-动觉的空间通过吮吸客体得到协调),但这些协调在相当长 时间内是不完全的,直至形成了永久客体的图式以后,才能对物体 形态的改变(即物理的变化)同位置的改变(即组成空间运动的改 变)之间作出根本性的区别(这种区别,彭加莱H.Poincare错误 地认为儿童一开始时就产生了)。 随着对永久客体的定位和寻找的行为模式的发展,“位移”(即 指位置的移动)最后组成(在第五及第六阶段)了实际空间的基本 结构。这结构一旦内化,将成为欧几里得几何学的运算基础。这 些“位移”形成了几何学上所谓的“位移群”。①从心理学上说来,位 移群具有下列几个特征(见下图): (1)位移AB同位移BC可协调成为单一的位移AC,而 AC仍然是这体系的一个部分。AB和BC倘不在一直线上,线 ①儿童接近一足岁时,当客体不在眼前时会引起儿童去寻找这客体。这寻找动 作便是实际空间中的“位移”以及由许多位移组成的“位移群”。这个术语应用于几何学 上,会产生各种互相交错的道路:可能沿着某个方向活动,也可能采取迁回曲折的道 路,而达到同一个目标。皮亚杰认为,最初的感知-运动空间便是起源于位移群。但 是,彭加菜认为这个群结构是儿童一开始就具备了的,是先验的东西。皮亚杰指出这 不是先验的东西,而是儿童在出生后第一年中逐渐发展形成的。永久客体这个概念的 形成是和位移群结构的形成相联系着的。一泽注 14
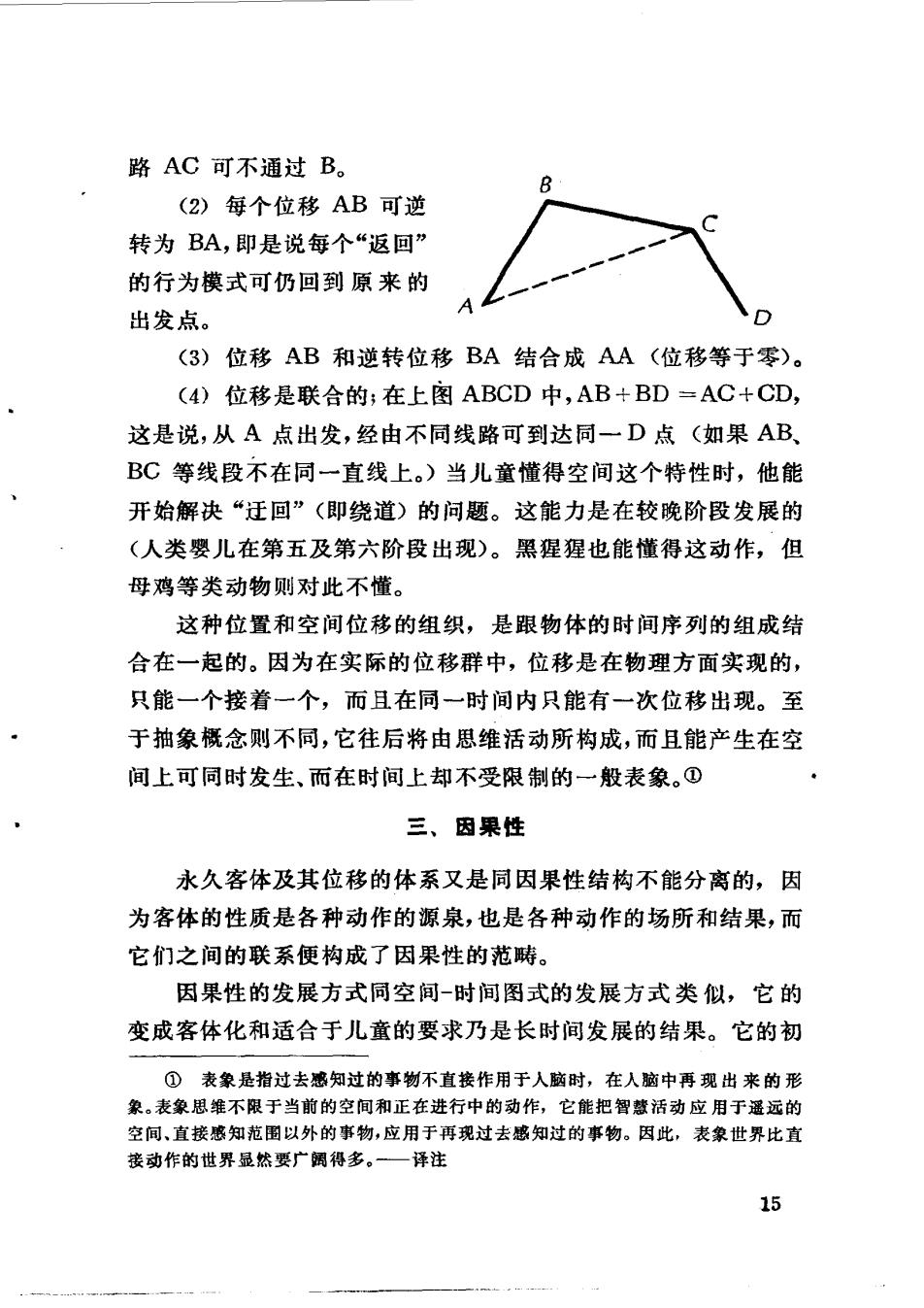
路AC可不通过B。 (2)每个位移AB可逆 转为BA,即是说每个“返回” 的行为模式可仍回到原来的 出发点。 (3)位移AB和逆转位移BA结合成AA(位移等于零)。 (4)位移是联合的;在上图ABCD中,AB+BD=AC+CD: 这是说,从A点出发,经由不同线路可到达同一D点(如果AB BC等线段不在同一直线上。)当儿童懂得空间这个特性时,他能 开始解决“迁回”(即绕道)的问题。这能力是在较晚阶段发展的 (人类婴儿在第五及第六阶段出现)。黑猩猩也能懂得这动作,但 母鸡等类动物则对此不懂。 这种位置和空间位移的组织,是跟物体的时间序列的组成结 合在一起的。因为在实际的位移群中,位移是在物理方面实现的, 只能一个接着一个,而且在同一时间内只能有一次位移出现。至 于抽象概念则不同,它往后将由思维活动所构成,而且能产生在空 间上可同时发生、而在时间上却不受限制的一般表象。① 三、因果性 永久客体及其位移的体系又是同因果性结构不能分离的,因 为客体的性质是各种动作的源泉,也是各种动作的场所和结果,而 它们之间的联系便构成了因果性的范畴。 因果性的发展方式同空间-时间图式的发展方式类似,它的 变成客体化和适合于儿童的要求乃是长时间发展的结果。它的初 ①表象是指过去感知过的事物不直接作用于人脑时,在人脑中再现出来的形 象。表象思推不限于当前的空间和正在进行中的动作,它能把智慧活动应用于遥远的 空间、直接感知范围以外的事物,应用于再现过去感知过的事物。因此,表象世界比直 接动作的世界显然要广阔得多。一译注 15
期阶段是以儿童自己的行动为中心的,儿童当时还不认识在物质 的因果图式中所固有的空间的和物理的联系。直至第三阶段,当 婴儿对所见到的客体已能开始微笑,并以不同图式(如移动、摆动、 打击、摩擦等等)玩弄客体时,但他仍不知道自己动作以外的原因, 也不认识空间接触的必要性。婴儿观察挂在摇篮顶上的一根线 时,他不会把拨浪鼓摆动的原因归之于线和拨浪鼓间的联系,而 仅是归之于“拉线”这个动作的本身,事实上后者是另一回事。下 面事例足以证明:儿童继续拉着线试图对两码外的物体发生作用, 或是拉着线试图使发出声音,等等。同样,观察到有的婴儿在这第 三阶段弯着身体向后仰着,做出摆动摇篮的姿势,也试图影响远 处的物体。往后,婴儿可能斜视前面的一只电灯开关,试图打开电 灯,等等。 这种初期的因果性观念,可以叫做“魔术性的现象主义者”。所 以叫做“现象主义者”,因为两件事的现象上的接近,儿童就凭以说 明其中的因果关系;所以叫做“魔术性”,因为以主体的动作为中 心,而不考虑因果之间的空间联系。上述情况的第一个方面,令人 想起休谟(Hume)的因果性解释,但他没有强调儿童自己的动作。 第二个方面的情况,令人想起曼纳(Maine)的解释,但这里儿童既 不知道自我,也不能区分自己和外部世界的界限。 但是,因为字宙是按照空间-时间组织由感知-运动的智慧 和永久客体的形成而逐新构成的,因而因果性变成客体化和空间 化:即是说,主体不仅能认识他自已的动作的原因,而且还能认识 各种客体的原因,而两种客体或客体的运动之间的因果关系是以 物理的和空间的联系为前提的。例如,在一个支持物、一根线或棍 子的行为模式中(在第五及第六阶段),倘若毯子、线或棍子与客 体相接触,显然毯子、线或棍子的运动被视为影响客体的运动(这 与作出位移的人的动作无关)。如果客体放在毯子边,不放在毯子 16
上,第五阶段的儿童将不拉这支持物(即指毯子)。反之,在第三或 甚至第四阶段的儿童则不然,即使已受过利用支持物的训练(或偶 然发现了支持物的作用),仍然要拉这毯子,尽管客体和毯子之间 不再保持“放在上面”的空间关系。 第三节感知-运动反应的认识方面 如果你把现实的构成方面同标志着反射、习惯和智慧机能的 特点的感知-运动图式的构成方面相比较的话,你就会发现存在 着一条具有重要意义的发展规律,因为这一规律将支配着儿童往 后所有的智慧发展。 感知-运动图式以三种显著而连续的形式表现出来(后继的 形式不出现,先行的形式就不消失): 一、最初的形式是节奏-结构(rhythructure),例如,我们 所观察到的要儿的自发的和整体的运动中,婴儿的反射无疑就是 此类运动的逐渐分化。因此,个别反射的本身仍然依赖于一种节 奏性的结构,这不仅存在于它们的复杂的运动中(如吸吮、转动), 而且也存在于这些反射所包含的重复性的运动中,例如从最初状 态X开始,进行到最后状态乙,然后又以同一程序重复运行(这 种重复可以立刻发生,或是稍缓发生)。 二、其次出现各种调节(regulations),这是按照各种图式使最 初的节奏开始分化。这些调节的最共同形式便是探索和控制最初 的习惯的形成(例如,“循环反应”,即是保证从节奏向调节过渡)以 及探索和控制最初的智慧动作。这些调节含有回路系统(loop sy8 tem),或称为反馈(feedback),通过逐渐纠正的逆向效果,使达到 半可逆性或近似可逆性。 三、最后开始出现可逆性(reversibility),它就是日后思维“运 17