前 言 本书适用于高等院校电气工程及其自动化、自动化专业本科“运动控制系统”或“电 力拖动自动控制系统”课程教学,其深入部分也可作为电力电子与电力传动、工业自动化 等相关学科研究生用书,还可供从事电力拖动控制系统的工程技术人员参考。 本书第1版的书名是《自动控制系统》,于1981年出版,第2版改名为《电力拖动自 动控制系统》,于1992年出版,并荣获第三届机械部优秀教材一等奖。作为普通高等教育 “九五”国家级重点教材的第3版改名为《电力拖动自动控制系统 一运动控制系统》,于 2003年出版。2009年修订出版第4版,2011年,本书获上海市普通高校优秀教材奖一等奖 和中国机械工业科学技术奖二等奖。本书自第1版出版以来,社会反响良好,获得相关课程 授课教师的广泛选用及好评。为了进一步促进和提高相关课程的教学质量,为教师、学生提 供更好的教材,机械工业出版社将本书第5版再次列人了重点教材精品化建设计划,以期继 续完善、提高教材的质量 本书第5版的主线仍然是电力拖动控制系统的原理、分析和设计。主要思路是:理论与 实际相结合,应用自动控制理论解决运动控制系统的分析和设计等实际问题。以转速、转 (电流)和磁链(磁通)控制规律为主线,由简人繁、由低及高地循序渐进,按照从开环到 闭环、从直流到交流、从调速到同服的层次论述运动控制系统的静、动态性能和设计方法。 交流调速系统是现代实际应用的主流,但直流调速系统仍是其理论基础,所以本书仍从 直流系统入门,在建立了扎实的控制系统分析与设计的概念和能力以后,再进人交流调速系 统的学习、最后在掌握了调速系统的基本规律和设计方法的基础上,进一步学习同服系统的 分析与设计。根据编著者的教学经验,交流电动机的动态模型、矢量控制系统与直接转矩控 制系统在本科教学中难度较大,应该让学生掌握其基本概念和分析方法,授课教师可在实际 教学中灵活处理其深度。 直流调速系统部分在沿承第3版的经典结构和内容、吸收第4版数字控制精华的基 上,主要做了如下改动: 1)考虑到中小功率直流调速系统中已用PWN变换器取代了品闸管整流器,因此删减 了V-M可逆直流调速系统部分,以PWM变换器为主要供电方式,并在第4章中先后分析了 记动时程和转速反向过薄过理 2)更加强调运动控制系统概念。在第2章阐述电力电子变换器和电动机机械特性时, 结合PWM脉冲产生原理,推导控制电压对电枢电压和电动机机械特性的控制调节作用。在 分析起动过程和制动过程时,结合控制电压变化分析了各阶段转速、电流变化规律。 3)第4章补充了按照典型Ⅱ型系统进行电流调节器设计 4)第5章结合运动控制系统讨论电流环和转速环采样频率确定方法:将转速调节器输 出与控制对象之间的零阶保持器用一阶惯性环节来近似,再按照模拟系统设计方法设计数字 调节器,保留原工程设计方法简单明了的优势,又兼顾系统动态性能。 交流调速系统基本保留了第4版的内容和风格。第6章包括异步电动机稳态模型
电力拖动自动控制系统一动边系能 PWM技术、调压调速、转速开环变压变频调速和转速闭环转差控制系统。第7章包括异步 电动机动态模型、矢量控制系统与直接转矩控制系统,对直接转矩控制系统做了较大的改 动,以切合实际工程应用。第8章的标题改为“绕线转子异步电机转子变频控制系统”,以 强调重点是“转子变频控制”,内容包括串级调速系统、双馈调速系统和双馈风力发电系 统。第9章为同步电动机调速系统,对同步电动机的稳定运行、矢量控制和直接转矩控制做 了分析与讨论。 第10章为同服系统,包括直流和交流伺服系统,建立直流和交流伺服系统的统一模型, 讨论系统结构,并分析系统的设计方法及稳定性。 本书按64学时编写,根据编著者的教学经验,在64学时内,难以全部完成10章内容 的教学。考虑到各校相应专业对课程的要求不同,在实际教学中可选用部分内容,以 第2~7章为重点,带*部分可作为选讲内容。本书给出一定数量的习题和思考题,以供任 课教师选用。 本课是一门实践性很强的课程,实验是学好本课程必不可少的重要环节,可以随课堂教 学过程进行,也可以开设单独的实验课,其目的在于培养学生掌握实验方法和运用理论分析 解决实际问题的能力。 本书第5版由上海大学阮毅教授、杨影副教授和陈伯时教授修改编写,其中直流调速系 统部分(第2~5章)由杨影刚教授修改编写,陈伯时教授协助讨论;交流调速系统部分第 8章由陈伯时教授修改编写:其余各章均由阮毅教授修改编写。 本书由清华大学杨耕教授主审,杨耕教授认真审阅了全部书稿,提出了许多宝贵而中肯 的修改意见,在此谨致衷心的感谢。上海交通大学陈敏逊教授、陈维钧副教授,上海大学 倪国宗副教授和沙立民副教授参加过本教材前几版的编写工作,东南大学赵家璧教授增承担 前几版的主审工作,自然有其不可磨灭的贡献。天津大学马小亮教授根据自身的工作经验 对调节器的设计和数字调节器设计提出了宝贵的意见,在此深表谢意。 我们在修改编写过程中虽然花了不少精力,但仍难免有错误与不足之处,殷切期望广大 读者批评指正。 编著者
常用符号表 一、元件和装置用的文字符号 放大器:明节器:电《绕单:A相绕组 M 电动机(总称) ACR MA 异步地动机 E 中站婆的器 直流电动机 为热背图 M 北由动机 电流节器:磁调节器 R 电器 变器 理 位汽调节蔽 RP 行 B SA 控开关,选择开关 转地调节器 正组电子模拟开关 A 转:期书界 A国 反组性子道我开 Av 培指理 s 用影由用 非电电量度换器 变摆 位传感器:转子位置检测器 ↑ 电流互感器:霍耳电流传感器 TAF 箭碰电液感器 CD 电流微分坏 测速发电机 川强单 变交压器 数字车成电路和器 双向品侧管交流调器 DLC 流电程扬离变器 数学转速信号形成环节 换紧:调料程 可控整流器 动作果流保 通变遇 液拉进环情 UPE 力电子变换碧 FR 调速反馈环节 UPEM 柳式可通电为电子变换 张动电路 UPW PW程波牛成环节污 铜爸发电机 收有型 触发装置 URP 敏繁流器 正触发装置 VD 极 T 反组型发装置 正打品情普特洁装 VR 反组品侧管流装器 继电器,接触器 格 超感:电抗理 品体管:品明管:功毕开关器件 二、常用缩写符号 电流踪PWI(Current Follow PW
电力施动自动控制系统一运动控制系城 电流环跟套PW3M《Curren Hysters,Band PWM CVCF IGRT 绝涤概双极品体管(sulated(Gate B时olar Transistor D 化例微分pmn,Daim 比倒积分(Pmportio,egrato同 PID 比例积分微分(Pt,i。ifferenfiti P-MOSFET 场效应福闸管《Power Mos Field Effert Trmsistr PWM 消除指定次数谐被的WM。PWM SPWM 正装波宽制Sins PWM SVPWM VR VVVE 三、参数和物理量文字符号 动能 整流电流:直流平均电流 线加速度:转依方程系数 价被流 感电 电容:输出玻拉变量 转动惯 直流电机在新定遮调下的电动势系 岁湖系统答环省放大系数环药 流中机在痛定形谈通的转距系 好步为下的标】:环系农的中环福 调速花围:转尼数 系:转弹性转矩系数 反电动势感应电动梦(大写为平均 直流电机地动势结构常刻 值成有效值,小写为瞬时值,下同子 人 流出机转正法面清:烫 是接 比放大盛数 电力电子变器放大系 游波次数:最次数 优动误男 州系船 许误 感,自感:对数幅值 感 开关领半 环系统频率特性辐值:调制瘦 传递函数 周内的味中数 重力加速瘦 型】系统两个时据数之 飞轮惯统 中数:线皮比:诺函数分 槽存据度 U 环对特性中 理想空线转速 电流:电电 同步转速 恒装中治 设对数
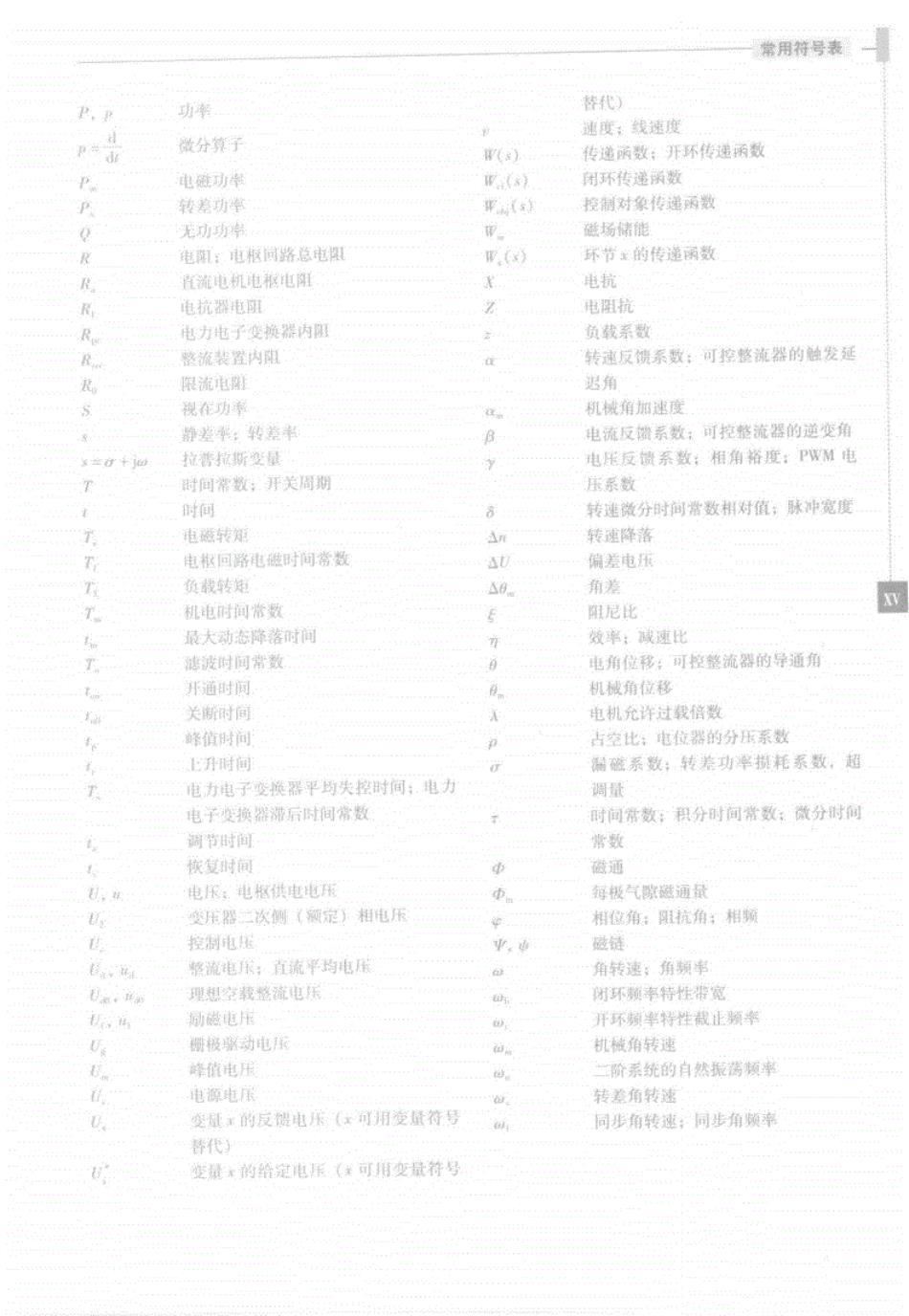
常用特号表 P.P 功转 替代) 微分算子 WCs) 传递函数:开环传递函数 电随功单 亚 州环传递函 转差功 授制对象传递函数 无功功 磁场储能 电:电同路总电 W.() 环节的传递函数 直流电机电形电阻 电抗 电抗器电 壮图疗 R 电力电子变换器内 负我系 数整炒置内阳 转速反债系数:可控整流器的触发 左的 迟角 视在功 机械角加速度 静差华:转差 B 电流反增系数:可控整流器的逆变角 拉米拉斯是 电压反馈系数:相角格度:PWM电 时间常数:开关周期 时 8 转速领分时间常数料对值:脉冲宽度 电磁转拥 转降落 电椒回路电磁时间常数 偏差电压 负转矩 角差 机电时常数 E 阻尼比 局大动东路落时 效率:减速比 成被阳面常数 电角位移:可控整流器的导通角 开通时同 9. 机被角位移 关斯时间 电机允许过倍 峰值时问 士为中,托位摆的分压系数 附磁系数:转差功率损耗系数,超 电力电子变换器平均失控时间:电力 调量 电子隆器带后时可常数 时间常数:积分时间常数:微分时间 调梦计 款数 复时同 通 电压:电枢供电电国 每极气隙诞通量 变压器二次侧《额定)相电压 相位角:抗角:相铜 控制压 察流电:直流平均电 角转速:角频车 理想空乾整流电国 闭环新有特性指宽 所楼度压 开环顿率样性载止顿 册极动电 机械角转速 峰值电用 一阶系统的白然荡 顶中 转差角转速 变量,的反健电疾(x可用变量符号 同步角转速:同步角 代 变量x的给定电压(:可用变量符号