的方法就称作一次完成算法或“整批”算法。它在理论研究方面有 许多方便之处,但当矩阵的维数增加时,矩阵求逆运算的计算量 会急剧增加,这会给计算机的计算速度和存储量带来负担,因此 有时也可用高斯消元法直接解正则方程3.26)和(3.34),以便更快 地求得参数的估计值。另外,一次完成算法要求必须是正则矩阵 (可逆矩阵),其充分必要条件是系统的输入信号必须是2阶持续 激励信号。这就意味着辨识所用的输入信号不能随意选择,否则 可能造成不能辨识。 26 202414120
2024/4/20 26 的方法就称作一次完成算法或“整批”算法。它在理论研究方面有 许多方便之处,但当矩阵的维数增加时,矩阵求逆运算的计算量 会急剧增加,这会给计算机的计算速度和存储量带来负担,因此 有时也可用高斯消元法直接解正则方程(3.26)和(3.34),以便更快 地求得参数的估计值。另外,一次完成算法要求必须是正则矩阵 (可逆矩阵),其充分必要条件是系统的输入信号必须是2n阶持续 激励信号。这就意味着辨识所用的输入信号不能随意选择,否则 可能造成不能辨识

目前常用的信号有: 随机序列(如白噪音); 伪随机序列(如M序列或逆M序列); 离散序列,通常指对含有n种频率(各频率不能满足 整数倍关系)的正弦组合信号进行采样处理获得的离散 序列。 进入例题3.2 27 202414120
2024/4/20 27 目前常用的信号有: 随机序列(如白噪音); 伪随机序列(如M序列或逆M序列); 离散序列,通常指对含有n种频率(各频率不能满足 整数倍关系)的正弦组合信号进行采样处理获得的离散 序列。 进入例题3.2

例32写出系统脉冲响应的最小二乘一次完成算法估计值。 设线性系统的输出z(用输入序列{(}与脉冲响应序列 {g(①),i-0,1,,W的卷积和形式表示为 zk)=∑g)hdk-i)+wk) (3.37) i=0 其中w(是系统输出测量噪声,设它是均值为零的白噪声。 当取=0,1,,L时,式(3.37)可写成式(3.16)的形式 (k)=H(k)8+w(k) (3.38) 式中 =1) g0) 「w07 2) 31) w2) 2L= 8= WL= ) g(N) w(L 28 202414120
2024/4/20 28 例3.2 写出系统脉冲响应的最小二乘一次完成算法估计值。 设线性系统的输出z(k)用输入序列{u(k)}与脉冲响应序列 {g(i),i=0,1,...,N}的卷积和形式表示为 ( ) ( ) ( ) ( ) = = − + N i z k g i u k i w k 0 (3.37) 其中w(k)是系统输出测量噪声,设它是均值为零的白噪声。 当取k=0,1,...,L时,式(3.37)可写成式(3.16)的形式 式中 z (k) H (k)g w (k) L = L + L ( ) ( ) ( ) = z L z z zL 2 1 ( ) ( ) ( ) = g N g g g 1 0 ( ) ( ) ( ) = w L w w wL 2 1 (3.38)
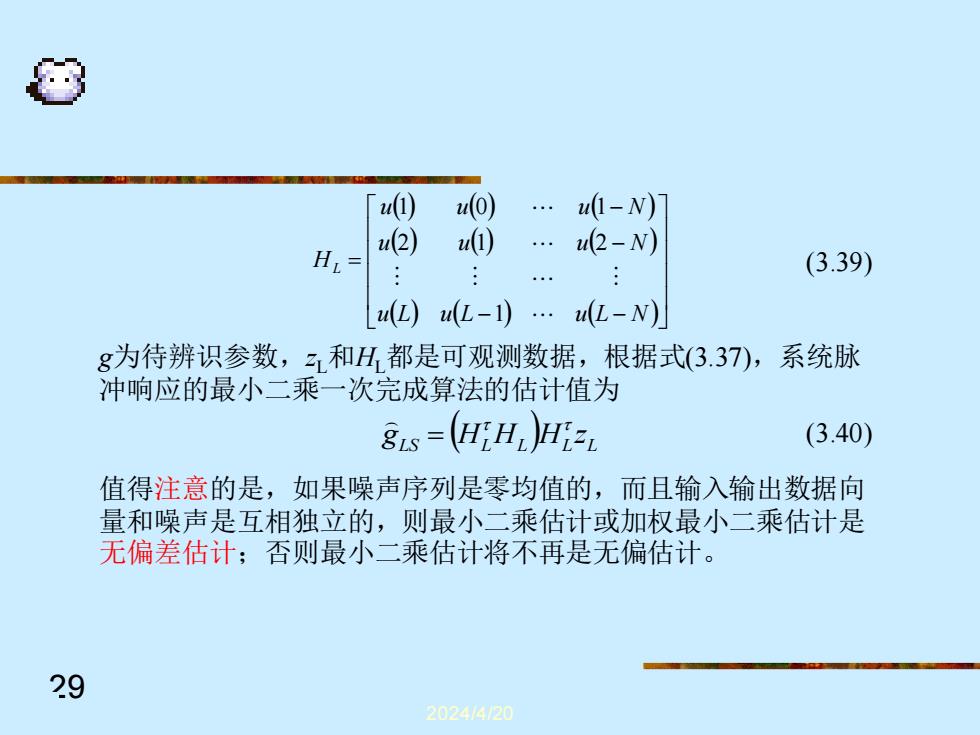
单 ) u(O) 1-N) 2) ) 2-N) HL= (3.39) )亿-) …(L-N) g为待辨识参数,和H都是可观测数据,根据式(3.37),系统脉 冲响应的最小二乘一次完成算法的估计值为 gis=HiHL)Hi=L (3.40) 值得注意的是,如果噪声序列是零均值的,而且输入输出数据向 量和噪声是互相独立的,则最小二乘估计或加权最小二乘估计是 无偏差估计;否则最小二乘估计将不再是无偏估计。 29 202414120
2024/4/20 29 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) − − − − = u L u L u L N u u u N u u u N HL 1 2 1 2 1 0 1 (3.39) g为待辨识参数,zL和HL都是可观测数据,根据式(3.37),系统脉 冲响应的最小二乘一次完成算法的估计值为 值得注意的是,如果噪声序列是零均值的,而且输入输出数据向 量和噪声是互相独立的,则最小二乘估计或加权最小二乘估计是 无偏差估计;否则最小二乘估计将不再是无偏估计。 ( ) LS L L L L g H H H z = (3.40)
本小节结束了! 30 202414120
2024/4/20 30