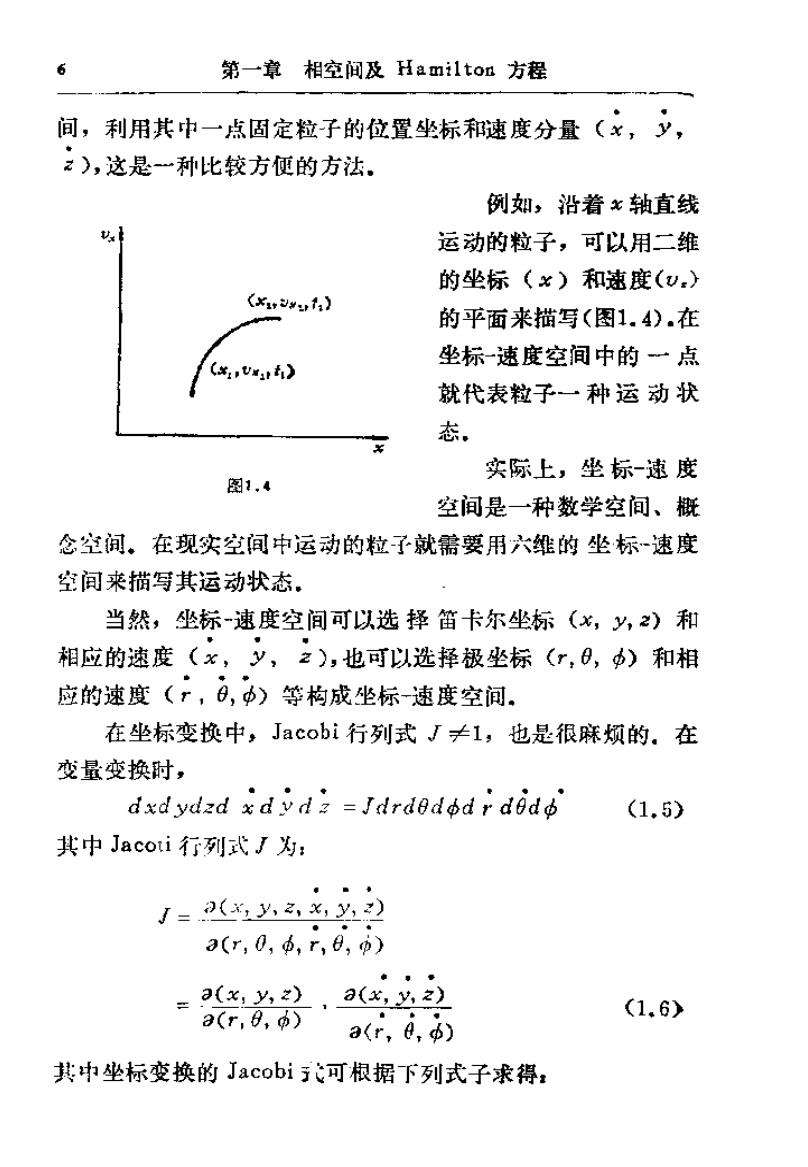
6 第一章相空间及Hamilton方程 间,利用其中一点固定粒子的位置坐标和速度分量(¥,y, 之),这是一种比较方便的方法。 例知,沿着x轴直线 运动的粒子,可以用二维 的坐标(×)和速箕(v. (x¥12】 的平面来描写(图1.4).在 坐标速度空间中的一点 (*:,Umt) 就代表粒子一种运动状 态 实际上,坐标-速度 图1,4 空间是一种数学空间、概 念空间。在现实空间中运动的粒子就需要用六维的坐标速度 空间来描写其运动状态。 当然,坐标-速度空间可以选择笛卡尔坐标(x,y,)和 相应的速度(x,y,之),也可以选择极坐标(r,0,)和相 应的速度(r,6,)等构成坐标速度空间 在坐标变换中,Jacobi行列式J≠1,也是很麻烦的.在 变量变换时, dxdydzd xdyd=Idrdedodr dedd (1.5) 其中Jacoti行列式J为: J=(¥2y3x,y) a(r,0,,r,8,p) 3(¥,y,2),a(,必2) a(r,8,) (1.6) a(r,0,$ 其中坐标变换的Jacobi可根据下列式子求得:
1】体系状态的描述 7 x=rsinecoso y=rsinlsind (1.7) 2xrc0s日 *=9x.=siu6cos中+rcos0c09中 at -r中sin0sind =y-rsinesing+rcos0sind at +rdsinecoso (1.8) 之=a2=7cos0-r日sin0 af J 3(x,y,2) 3(”,0,) ax ax ar 90 a中 ay ay ay ar 38 0 az 日2 az ar ag a中 sing cosd rcosd cosd -rsine sind sine sind rcoa日sin功 rsine cosd cos日 ~rsi盘0 0 =risind (1.9) 可类似的求出
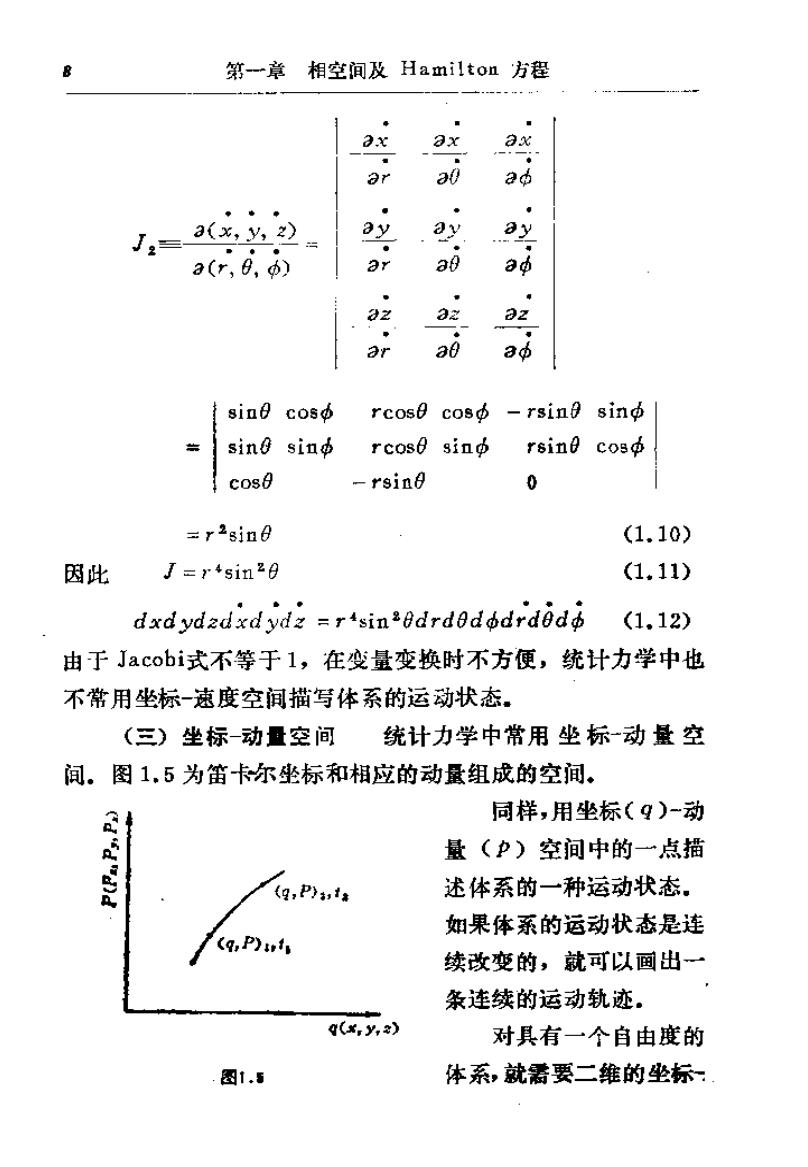
第一章 相空间及Hamilton方程 ■ 2x 日x ax ar a0 a中 J2三 3(x,y,2) ay ay a(r,9,) ar ad 3中 22 az az ar a0 36 sine coso rcose cos中 -rsina sind sing sind rcos0 sin中 rsin0cos中 cos0 -rsing 0 =r2sine (1.10) 因此 J=r4sin20 (1.11) dxdydzdxdydz =rsin*0drd0dddrded (1.12) 由于Jacobis式不等于1,在变量变换时不方便,统计力学中也 不常用坐标-速度空间描写体系的运动状态。 (三)坐标-动量空间 统计力学中常用坐标一动量空 间.图1.5为笛卡尔坐标和相应的动露组成的空间. 同样,用坐标(9)一动 量(P)空间中的一点描 (q,P)31a 述体系的一种运动状态 如果体系的运动状态是连 (q,P) 续改变的,就可以画出一 条连续的运动轨迹。 q(,y,) 对具有一个自由度的 图1.5 体系,就需要二维的坐标
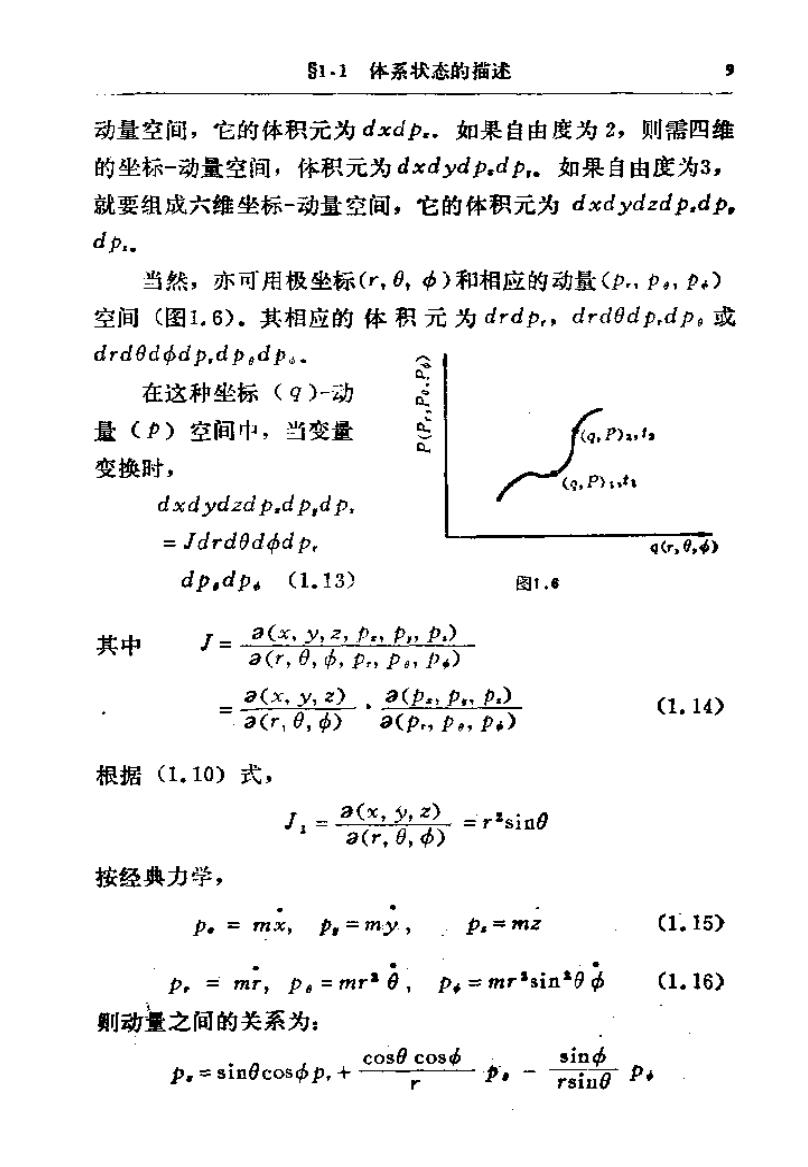
1.1体系状态的描述 9 动量空间,它的体积元为dxdp.如果自由度为2,则需四维 的坐标-动量空间,体积元为dxdydp.dp,。如果自由度为3, 就要组成六维坐标-动量空间,它的体积元为dxdydzdp,dp, dp:. 当然,亦可用极坐标(r,9,中)和相应的动量(p,pg,卫) 空间(图1.6)。其相应的体积元为drdp,drd0dpdp。或 drdedodp,dpedps. 在这种坐标(9)-动 是(P)空间巾,当变量 (d"d"d)d (qP)3,13 变换时, (g,P):t dxdydzdp.dp,dp, Jdrd0dodp. qr,8,) dp,dp。(1.13) 图1,6 其中 J=3(x2,p,色,p) 3(r,0,,P,卫,p) a(x,y,2),a(p卫,p) =3(r,8,) (1.14) a(P,Pe,P+) 根据(1,10)式, J,=a(x,么2)=rsin0 a(r,8,中) 按经典力学, p。=mx,p,=my,.卫。=mz (1.15) p。=mi,p。=mr2g,P4=mrsin29西 (1.16) 则动量之间的关系为: sind p。。a:na。56p,+一p。“rsiu0P
16 第一章相空间及Hamilton方程 力,-sinesindp,+co3形snb rsing Ps (1.17) p.=cosop.sing 3p, ap. aPs ap. ap8 3p0 J:=pp.) 3p, aPe a卫g 2(P,Pa,Pe) ap. apa ap+ 日ps 8p: ap. ap, apa 3p+ sine cosd cos0cps中 sin中 r rsine cos0sin中 sine sing c0s中 r rsine sine cos0 0 r 1 r2sine (1.18). 因此 Jacobi行列式: J=r2sin0·- 1 8in0=1 (1.19) 则雕体积元为: dxdydzdp.dp,dp,=drdedodp,dp.dp. (1.20) 可见,在坐标(9)二动量(P)空间中,变量变换时,体 积元不变。这种不变性对描述体系运动状态很方便,统计力学 中常用这种空间,叫做相空间(Phase space)或相字。相空间 和速度空间一样,也是一种抽象的概念空间,是为研究和计算 方便而设计的一种数学空间