硕士学位论文 第1章绪论 第1章绪论 1.1研究背景及意义 11.1问题背景 隧道在我国战略性基础设施建设中有重大意义,是地下工程的重要研究内容之一 隧道开挖面指隧道正在施工掘进处的隧道表面,其施工环境较为复杂、环境恶劣。隧 道初喷指在隧道开挖面中的待喷涂面上的第一层喷涂,使其凹凸不平处获得填充,成 为光滑的已喷涂面。由于施工环境复杂、喷浆机械智能化水平较低等因素影响,隧道 初喷工作极为依赖人工操作。随着隧道喷浆机械向自动化、智能化、无人化发展山, 对于隧道施工环境的三维检测逐渐成为必然的研究趋势。 (1)隧道开挖面结构 隧道施工处如图1-1-a所示,其环境中粉尘浓度高、光线昏暗、潮湿渗水。如图 1-l-b所示,开挖面主要包括三种类型的表面l:已喷涂面(Shoterete surface),待喷涂 面(或岩石面,Rock Surface),学子面(Working Surface)。如图1-l-b所示,岩质较为稀 松的隧道开挖面上一般安装有钢拱(Steel arch)、防护网(Steel wire mesh)等多种支护结 构),以此作为重要的支撑与加固措施,在此基础上逐层喷涂混凝土材料,使支护结 构与隧道整体凝固成形。如图1-1-c所示为隧道开挖面三种类型的表面、隧道地面、 隧道钢拱区域、隧道杂点等对应的三维点云的图像。 字子面持喷涂面已喷涂面杂物 地面 (a)湿喷实际环境 (b)开挖面结构 (C)开挖面点云结构 图1-」隧道开挖面结构实物及点云 (2)隧道支护结构 在喷射混凝土过程中,为了保证喷浆机喷头能够垂直于表面,喷头的方向应在钢 拱的边缘进行调整。因此,钢拱的位置需要提前提取。从隧道点云沿隧道方向取纵剖 面,可以更清晰地显示钢拱的局部结构
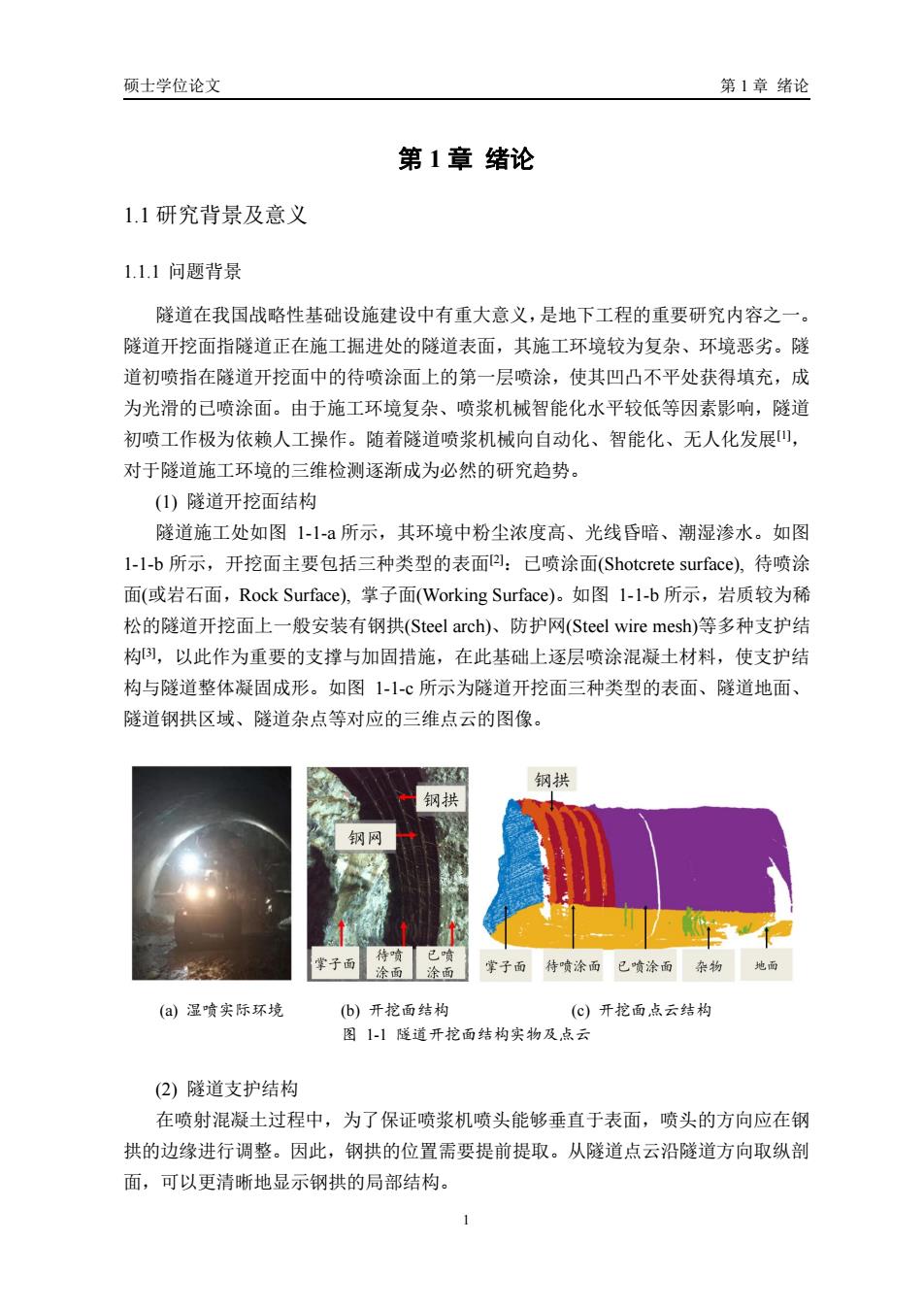
硕士学位论文 第 1 章 绪论 1 第 1 章 绪论 1.1 研究背景及意义 1.1.1 问题背景 隧道在我国战略性基础设施建设中有重大意义,是地下工程的重要研究内容之一。 隧道开挖面指隧道正在施工掘进处的隧道表面,其施工环境较为复杂、环境恶劣。隧 道初喷指在隧道开挖面中的待喷涂面上的第一层喷涂,使其凹凸不平处获得填充,成 为光滑的已喷涂面。由于施工环境复杂、喷浆机械智能化水平较低等因素影响,隧道 初喷工作极为依赖人工操作。随着隧道喷浆机械向自动化、智能化、无人化发展[1], 对于隧道施工环境的三维检测逐渐成为必然的研究趋势。 (1) 隧道开挖面结构 隧道施工处如图 1-1-a 所示,其环境中粉尘浓度高、光线昏暗、潮湿渗水。如图 1-1-b 所示,开挖面主要包括三种类型的表面[2]:已喷涂面(Shotcrete surface), 待喷涂 面(或岩石面,Rock Surface), 掌子面(Working Surface)。如图 1-1-b 所示,岩质较为稀 松的隧道开挖面上一般安装有钢拱(Steel arch)、防护网(Steel wire mesh)等多种支护结 构[3],以此作为重要的支撑与加固措施,在此基础上逐层喷涂混凝土材料,使支护结 构与隧道整体凝固成形。如图 1-1-c 所示为隧道开挖面三种类型的表面、隧道地面、 隧道钢拱区域、隧道杂点等对应的三维点云的图像。 (a) 湿喷实际环境 (b) 开挖面结构 (c) 开挖面点云结构 图 1-1 隧道开挖面结构实物及点云 (2) 隧道支护结构 在喷射混凝土过程中,为了保证喷浆机喷头能够垂直于表面,喷头的方向应在钢 拱的边缘进行调整。因此,钢拱的位置需要提前提取。从隧道点云沿隧道方向取纵剖 面,可以更清晰地显示钢拱的局部结构

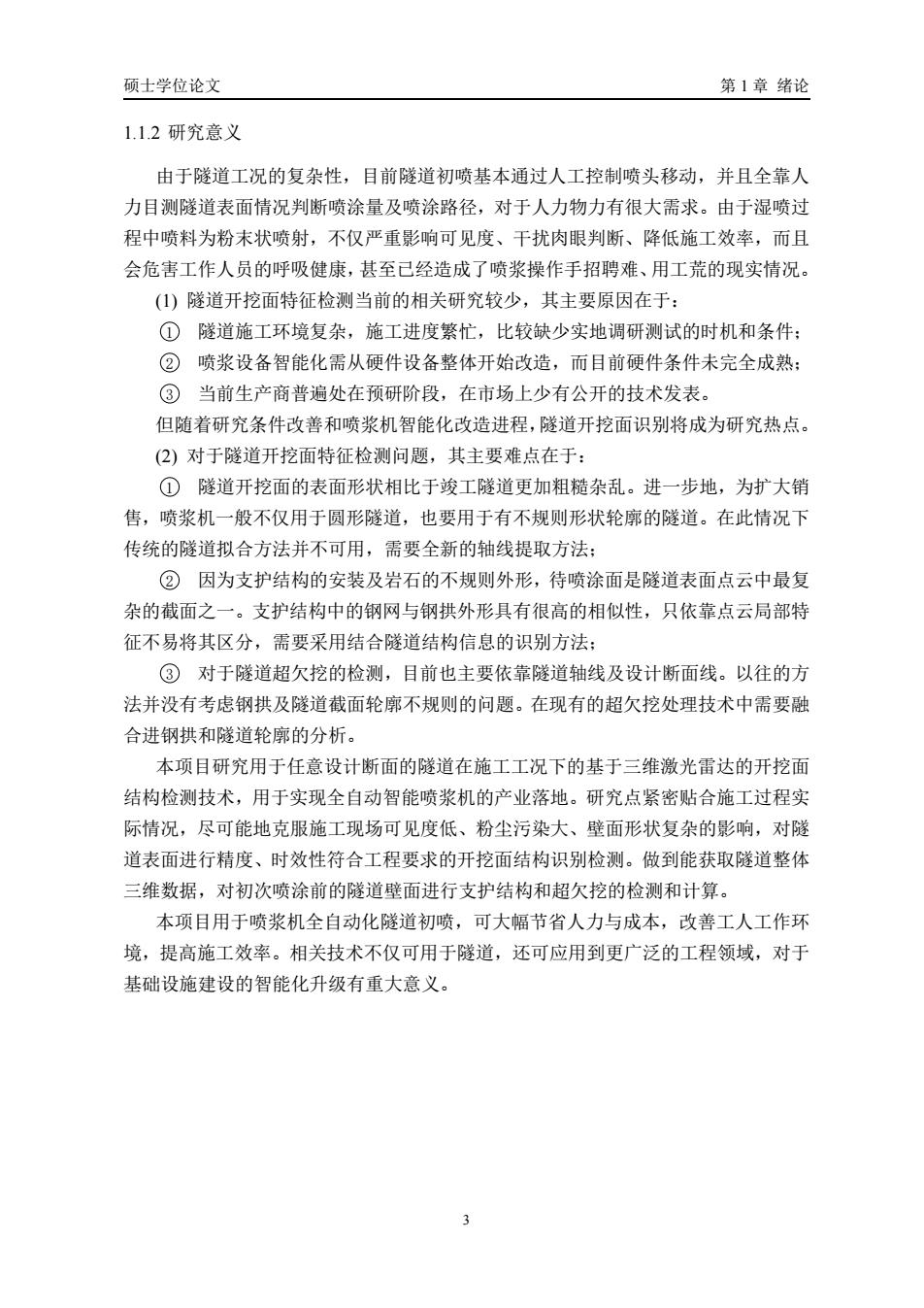
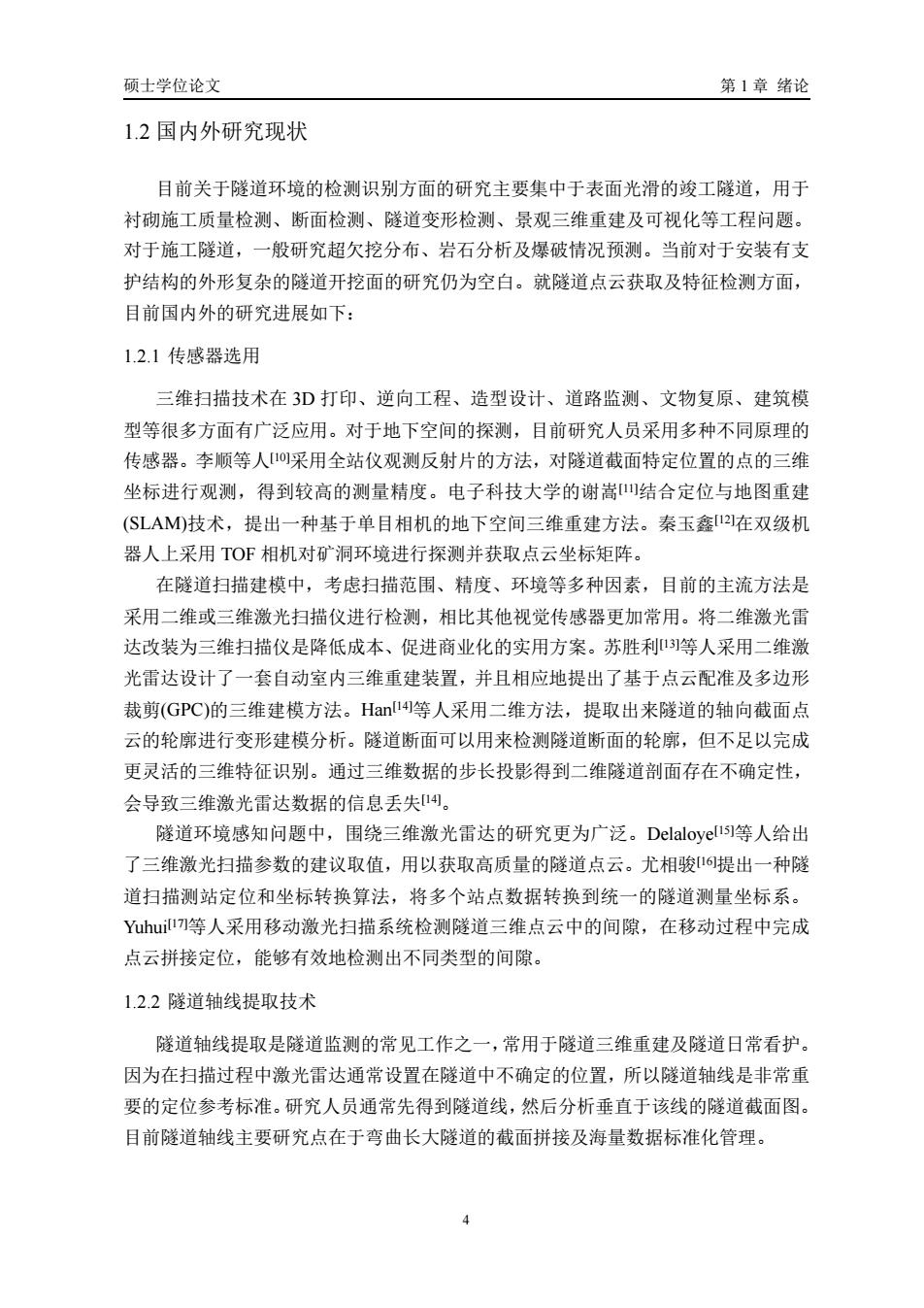
硕士学位论文 第1章绪论 如图1-2所示为钢拱的纵剖面结构示例。钢拱区域的点云具有独特的特点,它不 同于其他种类的特征线如道路边缘4,建筑轮廓6和零件例。钢拱最显著的几何特 征是它是标准的工字钢,表面光滑且钢拱形状规则,每条钢拱区域的点云都是一条基 本连续的长弧形(如图1-1-℃和图1-2所示)。此外,钢拱的轮廓会随着混凝土覆盖层 的厚度而变化:被混凝土覆盖的钢拱是较为平滑的U型凸起,可以作为一条连续的谷 脊线:裸露在外的钢拱相比被覆盖的钢拱轮廓更清晰,基本为一侧密集一侧稀疏的尖 锐的V型或平直单薄的I型,其底部边缘断裂,可以视为点云的外边界网。 隧道,点云径向面 混凝土覆盖的钢拱 露出的钢拱 山型 红 V型 1壁 道点云抽向 工工字型钢拱截而 钢拱区城的点云 钢网区城的点云 图12隧道点云径向藏面结构示意图 (3)隧道超欠挖 超欠挖指隧道开挖面在爆破过后存在的体积较大的凹陷和突起(如图13),与一般 表面不同,在隧道施工建设中需要进行专门的处理,例如优先喷涂或者分层喷涂。因 此,超欠挖的区域位置和面积体积是喷浆路径规划的基础。完成隧道钢拱检测以后将 钢拱部分剔除,可以进行隧道超欠挖的检测。在智能喷浆过程中,为减少标靶的使用 以及人工的定位测量,可以根据施工经验,以钢拱的表面作为喷浆的目标面。 ■超区 标喷涂面 二提失际表面 (a)隧道超欠挖示意图 )对应区城的实物图 13隧道超欠挖示意图及对照实物图
硕士学位论文 第 1 章 绪论 2 如图 1-2 所示为钢拱的纵剖面结构示例。钢拱区域的点云具有独特的特点,它不 同于其他种类的特征线如道路边缘[4][5],建筑轮廓[6][7]和零件[8]。钢拱最显著的几何特 征是它是标准的工字钢,表面光滑且钢拱形状规则,每条钢拱区域的点云都是一条基 本连续的长弧形(如图 1-1-c 和图 1-2 所示)。此外,钢拱的轮廓会随着混凝土覆盖层 的厚度而变化:被混凝土覆盖的钢拱是较为平滑的 U 型凸起,可以作为一条连续的谷 脊线;裸露在外的钢拱相比被覆盖的钢拱轮廓更清晰,基本为一侧密集一侧稀疏的尖 锐的 V 型或平直单薄的 I 型,其底部边缘断裂,可以视为点云的外边界[9]。 图 1-2 隧道点云径向截面结构示意图 (3) 隧道超欠挖 超欠挖指隧道开挖面在爆破过后存在的体积较大的凹陷和突起(如图 1-3),与一般 表面不同,在隧道施工建设中需要进行专门的处理,例如优先喷涂或者分层喷涂。因 此,超欠挖的区域位置和面积体积是喷浆路径规划的基础。完成隧道钢拱检测以后将 钢拱部分剔除,可以进行隧道超欠挖的检测。在智能喷浆过程中,为减少标靶的使用 以及人工的定位测量,可以根据施工经验,以钢拱的表面作为喷浆的目标面。 (a) 隧道超欠挖示意图 (b)对应区域的实物图 图 1-3 隧道超欠挖示意图及对照实物图
硕士学位论文 第1章绪论 1.1.2研究意义 由于隧道工况的复杂性,目前隧道初喷基本通过人工控制喷头移动,并且全靠人 力目测隧道表面情况判断喷涂量及喷涂路径,对于人力物力有很大需求。由于湿喷过 程中喷料为粉末状喷射,不仅严重影响可见度、干扰肉眼判断、降低施工效率,而且 会危害工作人员的呼吸健康,甚至己经造成了喷浆操作手招聘难、用工荒的现实情况 (1)隧道开挖面特征检测当前的相关研究较少,其主要原因在于: ①隧道施工环境复杂,施工进度繁忙,比较缺少实地调研测试的时机和条件: ②喷浆设备智能化需从硬件设备整体开始改造,而目前硬件条件未完全成熟: ③当前生产商普遍处在预研阶段,在市场上少有公开的技术发表。 但随者研究条件改善和喷浆机智能化改造进程,隧道开挖面识别将成为研究热点。 (2)对于隧道开挖面特征检测问题,其主要难点在于: ①隧道开挖面的表面形状相比于竣工隧道更加粗糙杂乱。进一步地,为扩大销 售,喷浆机一般不仅用于圆形隧道,也要用于有不规则形状轮廓的隧道。在此情况下 传统的隧道拟合方法并不可用,需要全新的轴线提取方法: ②因为支护结构的安装及岩石的不规则外形,待喷涂面是隧道表面点云中最复 杂的截面之一。支护结构中的钢网与钢拱外形具有很高的相似性,只依靠点云局部特 征不易将其区分,需要采用结合隧道结构信息的识别方法: ③对于隧道超欠挖的检测,目前也主要依靠隧道轴线及设计断面线。以往的方 法并没有考虑钢拱及隧道截面轮廓不规则的问题。在现有的超欠挖处理技术中需要融 合进钢拱和隧道轮廓的分析。 本项目研究用于任意设计断面的隧道在施工工况下的基于三维激光雷达的开挖面 结构检测技术,用于实现全自动智能喷浆机的产业落地。研究点紧密贴合施工过程实 际情况,尽可能地克服施工现场可见度低、粉尘污染大、壁面形状复杂的影响,对隧 道表面进行精度、时效性符合工程要求的开挖面结构识别检测。做到能获取隧道整体 三维数据,对初次喷涂前的隧道壁面进行支护结构和超欠挖的检测和计算。 本项目用于喷浆机全自动化隧道初喷,可大幅节省人力与成本,改善工人工作环 境,提高施工效率。相关技术不仅可用于隧道,还可应用到更广泛的工程领域,对于 基础设施建设的智能化升级有重大意义
硕士学位论文 第 1 章 绪论 3 1.1.2 研究意义 由于隧道工况的复杂性,目前隧道初喷基本通过人工控制喷头移动,并且全靠人 力目测隧道表面情况判断喷涂量及喷涂路径,对于人力物力有很大需求。由于湿喷过 程中喷料为粉末状喷射,不仅严重影响可见度、干扰肉眼判断、降低施工效率,而且 会危害工作人员的呼吸健康,甚至已经造成了喷浆操作手招聘难、用工荒的现实情况。 (1) 隧道开挖面特征检测当前的相关研究较少,其主要原因在于: 1 隧道施工环境复杂,施工进度繁忙,比较缺少实地调研测试的时机和条件; 2 喷浆设备智能化需从硬件设备整体开始改造,而目前硬件条件未完全成熟; 3 当前生产商普遍处在预研阶段,在市场上少有公开的技术发表。 但随着研究条件改善和喷浆机智能化改造进程,隧道开挖面识别将成为研究热点。 (2) 对于隧道开挖面特征检测问题,其主要难点在于: 1 隧道开挖面的表面形状相比于竣工隧道更加粗糙杂乱。进一步地,为扩大销 售,喷浆机一般不仅用于圆形隧道,也要用于有不规则形状轮廓的隧道。在此情况下 传统的隧道拟合方法并不可用,需要全新的轴线提取方法; 2 因为支护结构的安装及岩石的不规则外形,待喷涂面是隧道表面点云中最复 杂的截面之一。支护结构中的钢网与钢拱外形具有很高的相似性,只依靠点云局部特 征不易将其区分,需要采用结合隧道结构信息的识别方法; 3 对于隧道超欠挖的检测,目前也主要依靠隧道轴线及设计断面线。以往的方 法并没有考虑钢拱及隧道截面轮廓不规则的问题。在现有的超欠挖处理技术中需要融 合进钢拱和隧道轮廓的分析。 本项目研究用于任意设计断面的隧道在施工工况下的基于三维激光雷达的开挖面 结构检测技术,用于实现全自动智能喷浆机的产业落地。研究点紧密贴合施工过程实 际情况,尽可能地克服施工现场可见度低、粉尘污染大、壁面形状复杂的影响,对隧 道表面进行精度、时效性符合工程要求的开挖面结构识别检测。做到能获取隧道整体 三维数据,对初次喷涂前的隧道壁面进行支护结构和超欠挖的检测和计算。 本项目用于喷浆机全自动化隧道初喷,可大幅节省人力与成本,改善工人工作环 境,提高施工效率。相关技术不仅可用于隧道,还可应用到更广泛的工程领域,对于 基础设施建设的智能化升级有重大意义
硕士学位论文 第1章绪论 1.2国内外研究现状 目前关于隧道环境的检测识别方面的研究主要集中于表面光滑的竣工隧道,用于 衬砌施工质量检测、断面检测、隧道变形检测、景观三维重建及可视化等工程问题。 对于施工隧道,一般研究超欠挖分布、岩石分析及爆破情况预测。当前对于安装有支 护结构的外形复杂的隧道开挖面的研究仍为空白。就隧道点云获取及特征检测方面, 目前国内外的研究进展如下: 1.2.1传感器选用 三维扫描技术在3D打印、逆向工程、造型设计、道路监测、文物复原、建筑模 型等很多方面有广泛应用。对于地下空间的探测,目前研究人员采用多种不同原理的 传感器。李顺等人采用全站仪观测反射片的方法,对隧道截面特定位置的点的三维 坐标进行观测,得到较高的测量精度。电子科技大学的谢嵩山结合定位与地图重建 (SLAM)技术,提出一种基于单目相机的地下空间三维重建方法。秦玉鑫在双级机 器人上采用TOF相机对矿洞环境进行探测并获取点云坐标矩阵。 在隧道扫描建模中,考虑扫描范围、精度、环境等多种因素,目前的主流方法是 采用二维或三维激光扫描仪进行检测,相比其他视觉传感器更加常用。将二维激光雷 达改装为三维扫描仪是降低成本、促进商业化的实用方案。苏胜利等人采用二维激 光雷达设计了一套自动室内三维重建装置,并且相应地提出了基于点云配准及多边形 裁剪(GPC)的三维建模方法。Han1等人采用二维方法,提取出来隧道的轴向截面点 云的轮廓进行变形建模分析。隧道断面可以用来检测隧道断面的轮廓,但不足以完成 更灵活的三维特征识别。通过三维数据的步长投影得到二维隧道剖面存在不确定性, 会导致三维激光雷达数据的信息丢失。 隧道环境感知问题中,围绕三维激光雷达的研究更为广泛。Delaloyel5等人给出 了三维激光扫描参数的建议取值,用以获取高质量的隧道点云。尤相骏6提出一种隧 道扫描测站定位和坐标转换算法,将多个站点数据转换到统一的隧道测量坐标系。 Yuu列等人采用移动激光扫描系统检测隧道三维点云中的间隙,在移动过程中完成 点云拼接定位,能够有效地检测出不同类型的间隙。 1.22隧道轴线提取技术 隧道轴线提取是隧道监测的常见工作之一,常用于隧道三维重建及隧道日常看护 因为在扫描过程中激光雷达通常设置在隧道中不确定的位置,所以隧道轴线是非常重 要的定位参考标准。研究人员通常先得到隧道线,然后分析垂直于该线的隧道截面图。 目前隧道轴线主要研究点在于弯曲长大隧道的截面拼接及海量数据标准化管理。 4
硕士学位论文 第 1 章 绪论 4 1.2 国内外研究现状 目前关于隧道环境的检测识别方面的研究主要集中于表面光滑的竣工隧道,用于 衬砌施工质量检测、断面检测、隧道变形检测、景观三维重建及可视化等工程问题。 对于施工隧道,一般研究超欠挖分布、岩石分析及爆破情况预测。当前对于安装有支 护结构的外形复杂的隧道开挖面的研究仍为空白。就隧道点云获取及特征检测方面, 目前国内外的研究进展如下: 1.2.1 传感器选用 三维扫描技术在 3D 打印、逆向工程、造型设计、道路监测、文物复原、建筑模 型等很多方面有广泛应用。对于地下空间的探测,目前研究人员采用多种不同原理的 传感器。李顺等人[10]采用全站仪观测反射片的方法,对隧道截面特定位置的点的三维 坐标进行观测,得到较高的测量精度。电子科技大学的谢嵩[11]结合定位与地图重建 (SLAM)技术,提出一种基于单目相机的地下空间三维重建方法。秦玉鑫[12]在双级机 器人上采用 TOF 相机对矿洞环境进行探测并获取点云坐标矩阵。 在隧道扫描建模中,考虑扫描范围、精度、环境等多种因素,目前的主流方法是 采用二维或三维激光扫描仪进行检测,相比其他视觉传感器更加常用。将二维激光雷 达改装为三维扫描仪是降低成本、促进商业化的实用方案。苏胜利[13]等人采用二维激 光雷达设计了一套自动室内三维重建装置,并且相应地提出了基于点云配准及多边形 裁剪(GPC)的三维建模方法。Han [14]等人采用二维方法,提取出来隧道的轴向截面点 云的轮廓进行变形建模分析。隧道断面可以用来检测隧道断面的轮廓,但不足以完成 更灵活的三维特征识别。通过三维数据的步长投影得到二维隧道剖面存在不确定性, 会导致三维激光雷达数据的信息丢失[14]。 隧道环境感知问题中,围绕三维激光雷达的研究更为广泛。Delaloye [15]等人给出 了三维激光扫描参数的建议取值,用以获取高质量的隧道点云。尤相骏[16]提出一种隧 道扫描测站定位和坐标转换算法,将多个站点数据转换到统一的隧道测量坐标系。 Yuhui [17]等人采用移动激光扫描系统检测隧道三维点云中的间隙,在移动过程中完成 点云拼接定位,能够有效地检测出不同类型的间隙。 1.2.2 隧道轴线提取技术 隧道轴线提取是隧道监测的常见工作之一,常用于隧道三维重建及隧道日常看护。 因为在扫描过程中激光雷达通常设置在隧道中不确定的位置,所以隧道轴线是非常重 要的定位参考标准。研究人员通常先得到隧道线,然后分析垂直于该线的隧道截面图。 目前隧道轴线主要研究点在于弯曲长大隧道的截面拼接及海量数据标准化管理
硕士学位论文 第1章绪论 河海大学的汪子豪针对高速公路隧道的三维激光扫描点云,设计了一种从中提 取完整断面轮廓线的自动化方法,将隧道断面点的法向信息累积叉乘并将结果拟合成 隧道中轴线,从而获取垂直于轴线的参考面,最后采用三角剖分方法截取断面。戴子 枢等人提出了一种基于测距数据的隧道断面形状重构算法,使用圆弧方程对隧道断 面进行分段插值。 文献专门研究了隧道轴线的提取和隧道点云的拼接,其中圆形拟合是最为常 见的方法。Kag等人P通过获得表面光滑的圆形隧道中与隧道两边平行的中线来提 取隧道线,但该方法对隧道的形状高度敏感,并不适用于形状多样和缺少大量点云的 隧道。Zhua24等人设计了一种基于激光点云数据投影的方法,通过搜索算法提取隧道 投影点云中的两侧边缘点拟合隧道中心轴。 为应对轮廓形状与噪声对隧道轴线提取的影响,Zhou等人2基于对切片后的轨道 隧道点云进行三维线性拟合,提取轨道线,得到基于轨道线的隧道中心线。Goncalves 等人提出针对隧道点云的分段投影法可以有效地分析点云片段,但对离散点很敏 感,需要手动调整离群点。轴线也可反过来应用于点云噪声的消除。Mostafa等人2可 对于竣工地铁隧道雷达数据,通过对横截面依次进行圆拟合并使用残差分析来消除异 常值,但限于比较平整的隧道。张立朔等人以运营中的地铁隧道为研究对象,同样 采用隧道断面分析,基于椭圆拟合提出一种利用自适应的阀值剔除点云粗差的方法。 1.2.3隧道点云特征检测 隧道特征检测的研究主要集中在地下地表监测和已建成隧道的变形断面。本文为 了降低计算复杂度,提高钢拱提取精度,需要通过分割开挖面,对待喷涂面(岩石面) 进行提前提取。与岩石面相关的研究主要集中在开挖面的可视化)、超挖体积计算或 预测2、和岩石表面爆破特性方面训而且以往对岩石表面的研究主要依赖于人机交 互,主要用于后期处理3。 现有的研究多以隧道围岩或衬砌面为主要研究对象,而其他人工安装在隧道内的 结构一般作为噪声去除。Cheng等人B判设计了一种基于角度的形态相关滤波方法,自 动、不加区分地去除非圆形隧道断面上的所有非衬砌点。Mh等人B探讨了隧道地表 数据中钢网的去除,采用主成分分析(PCA)方法,在不考虑整个隧道形状类型的情况 下,对网络局部区域进行分析。 以往的隧道断面检测研究多采用半自动方法,在处理过程中需要人工调整和修改 算法参数。Elberink等人Bol研究了与隧道钢拱轮廓相似的多条平行轨道的自动提取算 法。与建在平坦地面上的铁路轨道不同的是,隧道钢拱的安装紧贴弯曲的隧道墙壁, 因此隧道的延展是一个需要重点考虑的问题。Du等人B别提出了一种梯度统计方法, 通过直方图统计方法和峰值检测方法来确定隧道分段的位置。该方法通过选择合适的 角度间隔,减少盲目性,提高检测精度。 5
硕士学位论文 第 1 章 绪论 5 河海大学的汪子豪[19]针对高速公路隧道的三维激光扫描点云,设计了一种从中提 取完整断面轮廓线的自动化方法,将隧道断面点的法向信息累积叉乘并将结果拟合成 隧道中轴线,从而获取垂直于轴线的参考面,最后采用三角剖分方法截取断面。戴子 枢[20]等人提出了一种基于测距数据的隧道断面形状重构算法,使用圆弧方程对隧道断 面进行分段插值。 文献[27][22]专门研究了隧道轴线的提取和隧道点云的拼接,其中圆形拟合是最为常 见的方法。Kang 等人[23]通过获得表面光滑的圆形隧道中与隧道两边平行的中线来提 取隧道线,但该方法对隧道的形状高度敏感,并不适用于形状多样和缺少大量点云的 隧道。Zhua [24]等人设计了一种基于激光点云数据投影的方法,通过搜索算法提取隧道 投影点云中的两侧边缘点拟合隧道中心轴。 为应对轮廓形状与噪声对隧道轴线提取的影响,Zhou 等人[25]基于对切片后的轨道 隧道点云进行三维线性拟合,提取轨道线,得到基于轨道线的隧道中心线。Goncalves 等人[26]提出针对隧道点云的分段投影法可以有效地分析点云片段,但对离散点很敏 感,需要手动调整离群点。轴线也可反过来应用于点云噪声的消除。Mostafa 等人[27] 对于竣工地铁隧道雷达数据,通过对横截面依次进行圆拟合并使用残差分析来消除异 常值,但限于比较平整的隧道。张立朔[18]等人以运营中的地铁隧道为研究对象,同样 采用隧道断面分析,基于椭圆拟合提出一种利用自适应的阈值剔除点云粗差的方法。 1.2.3 隧道点云特征检测 隧道特征检测的研究主要集中在地下地表监测和已建成隧道的变形断面。本文为 了降低计算复杂度,提高钢拱提取精度,需要通过分割开挖面,对待喷涂面(岩石面) 进行提前提取。与岩石面相关的研究主要集中在开挖面的可视化[28]、超挖体积计算或 预测[29]、和岩石表面爆破特性方面[3][30]而且以往对岩石表面的研究主要依赖于人机交 互,主要用于后期处理[31][32]。 现有的研究多以隧道围岩或衬砌面为主要研究对象,而其他人工安装在隧道内的 结构一般作为噪声去除。Cheng 等人[34]设计了一种基于角度的形态相关滤波方法,自 动、不加区分地去除非圆形隧道断面上的所有非衬砌点。Mah 等人[35]探讨了隧道地表 数据中钢网的去除,采用主成分分析(PCA)方法,在不考虑整个隧道形状类型的情况 下,对网络局部区域进行分析。 以往的隧道断面检测研究多采用半自动方法,在处理过程中需要人工调整和修改 算法参数。Elberink 等人[36]研究了与隧道钢拱轮廓相似的多条平行轨道的自动提取算 法。与建在平坦地面上的铁路轨道不同的是,隧道钢拱的安装紧贴弯曲的隧道墙壁, 因此隧道的延展是一个需要重点考虑的问题。Du 等人[37]提出了一种梯度统计方法, 通过直方图统计方法和峰值检测方法来确定隧道分段的位置。该方法通过选择合适的 角度间隔,减少盲目性,提高检测精度