
硕士学位论文 第1章绪论 以上主要是对于竣工后的隧道表面所做的分析研究。对于动态施工过程及不同阶 段,李静别等人采用了三维激光扫描技术快速得到在不同施工阶段和工况条件下隧道 的衬砌厚度和衬砌质量,但其研究不包括初期支护之前的最原始的隧道壁与防护网的 表面情况,而原始壁面情况明显更为复杂,这也就是本文所要研究的目标。 对于点云数据中特征的分类和提取,需要对点云进行分割。几何特征是三维物体 的重要特性,对于几何模型的三维重建起到重要作用0。由于钢拱区具有连续的几 何特征,根据N等人的三维边缘定义,可以将其视为三维边缘特征。隧道钢拱点云 的特性类似于谷脊特征线,尤其是被混凝土覆盖部分表面的钢拱区域,是一种与投影 视角无关的顺应曲面凹凸变化趋势的曲线。张雨禾4提出一种基于基于局部重建的点 云谷脊特征检测方法,利用离散拉普拉斯算子进行点的局部增强,能较好地识别出散 乱点云中的不规则谷脊特征,但是该方法对于V型钢拱区域并不适用。 1.2.4隧道超欠挖计算 隧道超欠挖的计算对隧道的岩面稳定性和喷浆成本有直接影响)。严格控制超欠 挖量有利于顺利施工生产,具有重要价值。传统隧道超欠挖检测主要采用全站仪、断 面仪和自动测量机器设备等,通过人工测量的方式,对隧道的每个点、每个断面依次 进行断面轮廓测量。 传统的人工测量的方法检测用时较长、检测效率低下44。因此目前主要采用激 光点云数据,通过一定方法提取隧道实测点云数据的连续断面从而进行隧道超欠挖检 测。武汉大学的许磊46提出一种基于激光点云的隧道超欠挖检测算法,实现隧道的超 欠挖自动检测:采用半径搜索与矩形分割算法,实现断面点云快速分割。 以往的超欠挖检测一般依靠隧道切面一层层地进行分析,然后将每层的超欠挖量 累加,从而得到完整隧道的超欠挖分布。孟庆年4切等人采用了将设计断面线离散化并 拉伸分布的方法,直接构建出完整的隧道模型离散点云,进而通过距离比较直接获得 隧道整体的超欠挖分布情况。葛超4等人采用将点云插值栅格化为图像的方法,引用 图像处理中的连通域检测技术,将隧道面作为整体而不是切片进行分析从而获得了每 片超欠挖区域的分别标记,具有很好的借鉴意义。Wang等人4提出一种基于Canny 边缘检测的隧道轮廓线提取方法,将点云投影到平面并提取出投影中的点的边缘轮 廓,再将轮廓导入AutoCAD人机交互地计算隧道超欠挖量。 实现点云的栅格化是计算隧道超欠挖要解决的重要问题。对于无序、粗糙和多利 类型的点云的处理,研究人员通常通过交互软件将其可视化并存储起来进行后处理 B,这并不适合自动化构建场景。Li等人提出了一种新的方法来建立类似于隧道 的多管状曲面点云的指数,通过对矿井巷道的三维网格进行了重构,并将其投影到二 维平面上,得到了巷道点云的均匀网格指数。这种方法也需要用户交互才能实现更均 匀的栅格化效果。 6
硕士学位论文 第 1 章 绪论 6 以上主要是对于竣工后的隧道表面所做的分析研究。对于动态施工过程及不同阶 段,李静[38]等人采用了三维激光扫描技术快速得到在不同施工阶段和工况条件下隧道 的衬砌厚度和衬砌质量,但其研究不包括初期支护之前的最原始的隧道壁与防护网的 表面情况,而原始壁面情况明显更为复杂,这也就是本文所要研究的目标。 对于点云数据中特征的分类和提取,需要对点云进行分割。几何特征是三维物体 的重要特性,对于几何模型的三维重建起到重要作用[39][40]。由于钢拱区具有连续的几 何特征,根据 Ni [41]等人的三维边缘定义,可以将其视为三维边缘特征。隧道钢拱点云 的特性类似于谷脊特征线,尤其是被混凝土覆盖部分表面的钢拱区域,是一种与投影 视角无关的顺应曲面凹凸变化趋势的曲线。张雨禾[42]提出一种基于基于局部重建的点 云谷脊特征检测方法,利用离散拉普拉斯算子进行点的局部增强,能较好地识别出散 乱点云中的不规则谷脊特征,但是该方法对于 V/I 型钢拱区域并不适用。 1.2.4 隧道超欠挖计算 隧道超欠挖的计算对隧道的岩面稳定性和喷浆成本有直接影响[43]。严格控制超欠 挖量有利于顺利施工生产,具有重要价值。传统隧道超欠挖检测主要采用全站仪、断 面仪和自动测量机器设备等,通过人工测量的方式,对隧道的每个点、每个断面依次 进行断面轮廓测量。 传统的人工测量的方法检测用时较长、检测效率低下[44][45]。因此目前主要采用激 光点云数据,通过一定方法提取隧道实测点云数据的连续断面从而进行隧道超欠挖检 测。武汉大学的许磊[46]提出一种基于激光点云的隧道超欠挖检测算法,实现隧道的超 欠挖自动检测;采用半径搜索与矩形分割算法,实现断面点云快速分割。 以往的超欠挖检测一般依靠隧道切面一层层地进行分析,然后将每层的超欠挖量 累加,从而得到完整隧道的超欠挖分布。孟庆年[47]等人采用了将设计断面线离散化并 拉伸分布的方法,直接构建出完整的隧道模型离散点云,进而通过距离比较直接获得 隧道整体的超欠挖分布情况。葛超[48]等人采用将点云插值栅格化为图像的方法,引用 图像处理中的连通域检测技术,将隧道面作为整体而不是切片进行分析从而获得了每 片超欠挖区域的分别标记,具有很好的借鉴意义。Wang 等人[49]提出一种基于 Canny 边缘检测的隧道轮廓线提取方法,将点云投影到平面并提取出投影中的点的边缘轮 廓,再将轮廓导入 AutoCAD 人机交互地计算隧道超欠挖量。 实现点云的栅格化是计算隧道超欠挖要解决的重要问题。对于无序、粗糙和多种 类型的点云的处理,研究人员通常通过交互软件将其可视化并存储起来进行后处理 [31],这并不适合自动化构建场景。Lai 等人[32]提出了一种新的方法来建立类似于隧道 的多管状曲面点云的指数,通过对矿井巷道的三维网格进行了重构,并将其投影到二 维平面上,得到了巷道点云的均匀网格指数。这种方法也需要用户交互才能实现更均 匀的栅格化效果
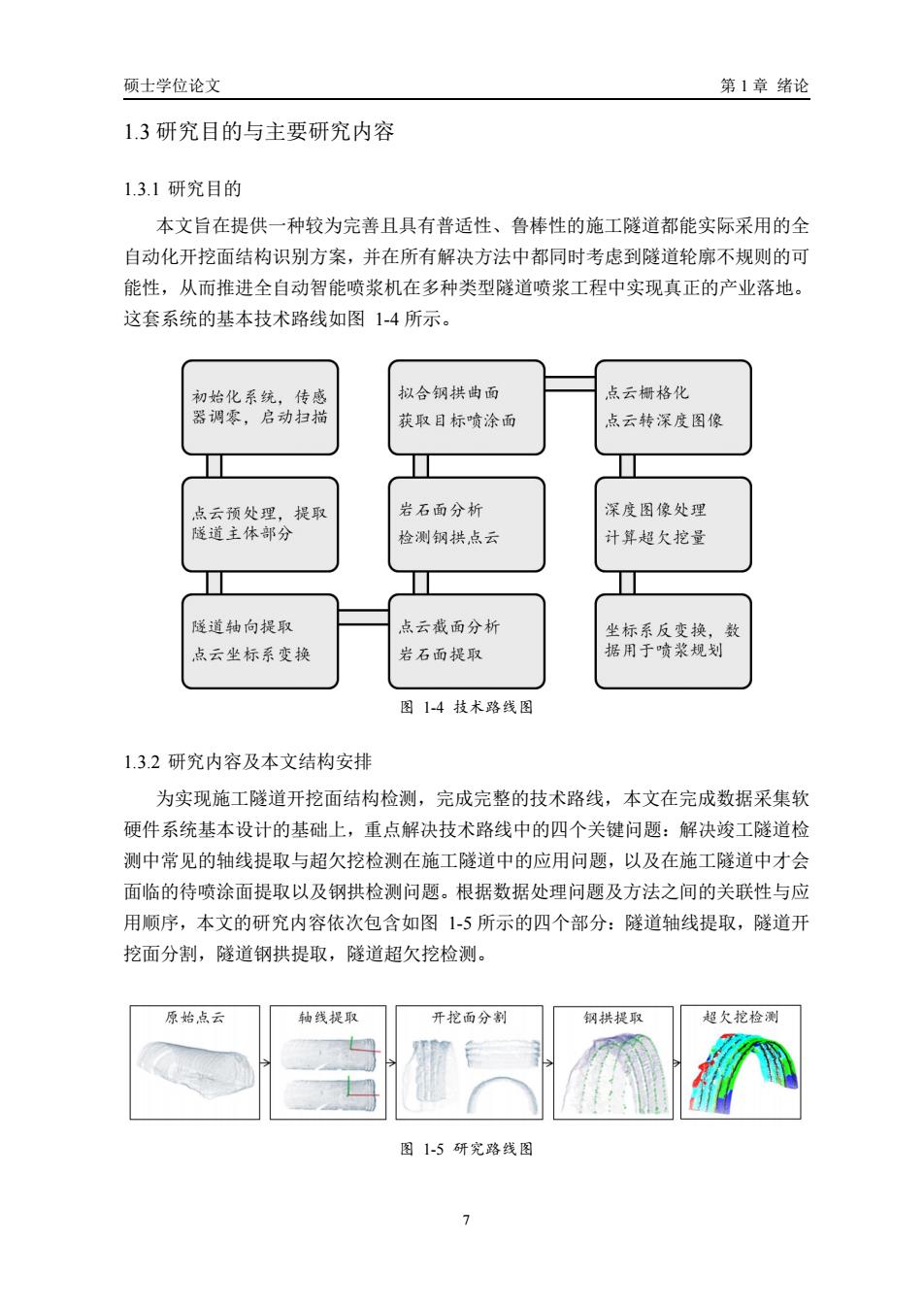
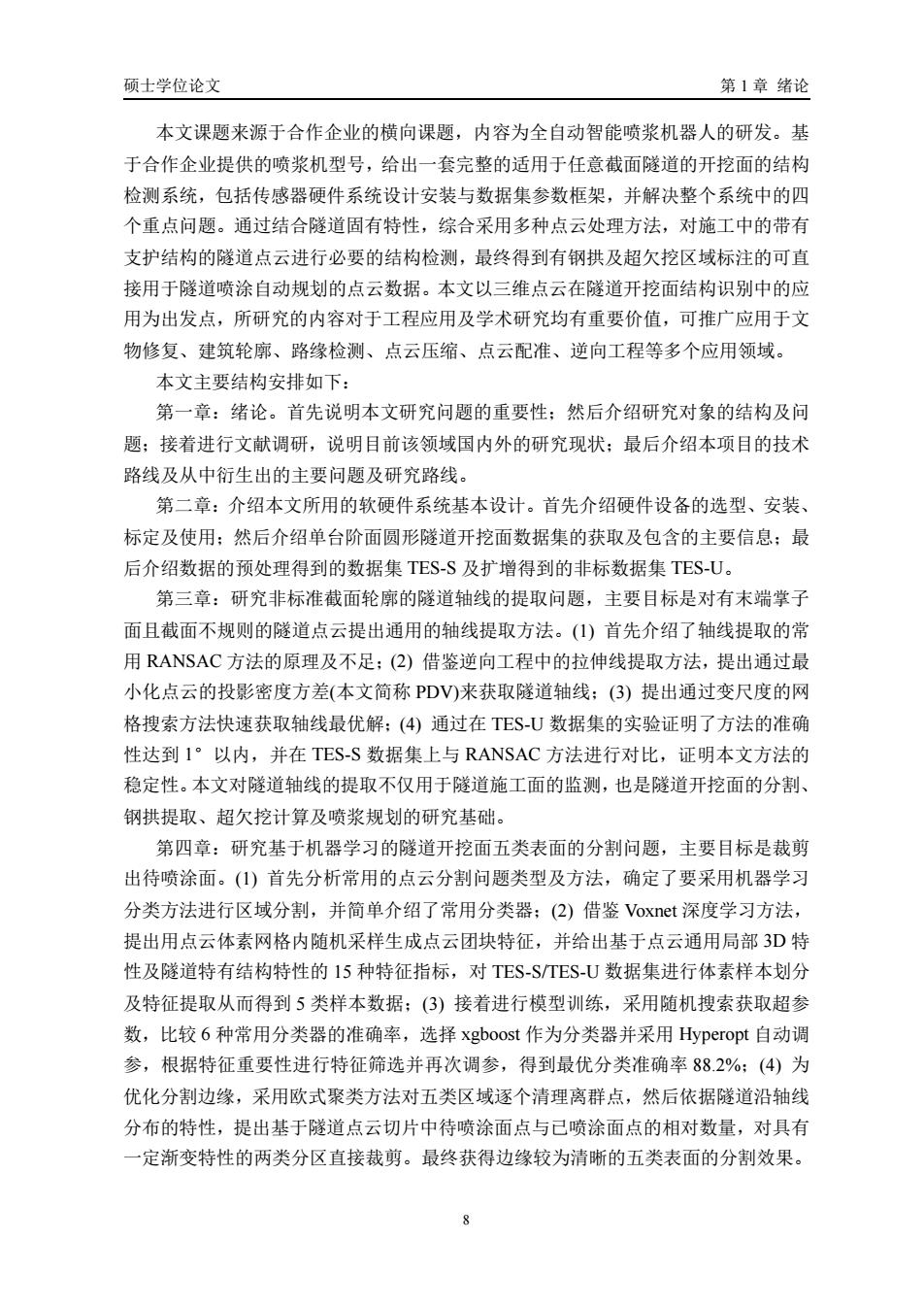
硕士学位论文 第1章绪论 1.3研究目的与主要研究内容 1.3.1研究目的 本文旨在提供一种较为完善且具有普适性、鲁棒性的施工隧道都能实际采用的全 自动化开挖面结构识别方案,并在所有解决方法中都同时考虑到隧道轮廓不规则的可 能性,从而推进全自动智能喷浆机在多种类型隧道喷浆工程中实现真正的产业落地。 这套系统的基本技术路线如图1-4所示。 拟会钢拱曲面 点云辑格化 获取目标喷涂面 点云转深度图像 点云预处理,提取 岩石面分析 深度图像处理 莲道主体部分 检测钢拱点品 计算超女拉是 道轴向提取 点云藏面分析 点云坐标系变换 岩石面提取 图14技术路线图 1.3.2研究内容及本文结构安排 为实现施工隧道开挖面结构检测,完成完整的技术路线,本文在完成数据采集软 硬件系统基本设计的基础上,重点解决技术路线中的四个关键问题:解决竣工隧道检 测中常见的轴线提取与超欠挖检测在施工隧道中的应用问题,以及在施工隧道中才会 面临的待喷涂面提取以及钢拱检测问题。根据数据处理问题及方法之间的关联性与应 用顺序,本文的研究内容依次包含如图1-5所示的四个部分:隧道轴线提取,隧道开 挖面分割,隧道钢拱提取,隧道超欠挖检测。 原始点云 开挖面分 钢拱提取 超欠挖检深 图15研究路线图
硕士学位论文 第 1 章 绪论 7 1.3 研究目的与主要研究内容 1.3.1 研究目的 本文旨在提供一种较为完善且具有普适性、鲁棒性的施工隧道都能实际采用的全 自动化开挖面结构识别方案,并在所有解决方法中都同时考虑到隧道轮廓不规则的可 能性,从而推进全自动智能喷浆机在多种类型隧道喷浆工程中实现真正的产业落地。 这套系统的基本技术路线如图 1-4 所示。 图 1-4 技术路线图 1.3.2 研究内容及本文结构安排 为实现施工隧道开挖面结构检测,完成完整的技术路线,本文在完成数据采集软 硬件系统基本设计的基础上,重点解决技术路线中的四个关键问题:解决竣工隧道检 测中常见的轴线提取与超欠挖检测在施工隧道中的应用问题,以及在施工隧道中才会 面临的待喷涂面提取以及钢拱检测问题。根据数据处理问题及方法之间的关联性与应 用顺序,本文的研究内容依次包含如图 1-5 所示的四个部分:隧道轴线提取,隧道开 挖面分割,隧道钢拱提取,隧道超欠挖检测。 图 1-5 研究路线图
硕士学位论文 第1章绪论 本文课题来源于合作企业的横向课题,内容为全自动智能喷浆机器人的研发。基 于合作企业提供的喷浆机型号,给出一套完整的适用于任意截面隧道的开挖面的结构 检测系统,包括传感器硬件系统设计安装与数据集参数框架,并解决整个系统中的四 个重点问题。通过结合隧道固有特性,综合采用多种点云处理方法,对施工中的带有 支护结构的隧道点云进行必要的结构检测,最终得到有钢拱及超欠挖区域标注的可直 接用于隧道喷涂自动规划的点云数据。本文以三维点云在隧道开挖面结构识别中的应 用为出发点,所研究的内容对于工程应用及学术研究均有重要价值,可推广应用于文 物修复、建筑轮廓、路缘检测、点云压缩、点云配准、逆向工程等多个应用领域。 本文主要结构安排如下: 第一章:绪论。首先说明本文研究问题的重要性:然后介绍研究对象的结构及问 题:接着进行文献调研,说明目前该领域国内外的研究现状:最后介绍本项目的技术 路线及从中衍生出的主要问题及研究路线。 第二章:介绍本文所用的软硬件系统基本设计。首先介绍硬件设备的选型、安装 标定及使用:然后介绍单台阶面圆形隧道开挖面数据集的获取及包含的主要信息:最 后介绍数据的预处理得到的数据集TES-S及扩增得到的非标数据集TESU。 第三章:研究非标准截面轮廓的隧道轴线的提取问题,主要目标是对有末端掌子 面且截面不规则的隧道点云提出通用的轴线提取方法。()首先介绍了轴线提取的常 用RANSAC方法的原理及不足;(2)借鉴逆向工程中的拉伸线提取方法,提出通过最 小化点云的投影密度方差(本文简称PDV)来获取隧道轴线:(3)提出通过变尺度的网 格搜索方法快速获取轴线最优解:(4)通过在TES-U数据集的实验证明了方法的准确 性达到1°以内,并在TES-S数据集上与RANSAC方法进行对比,证明本文方法的 稳定性。本文对隧道轴线的提取不仅用于隧道施工面的监测,也是隧道开挖面的分割、 钢拱提取、超欠挖计算及喷浆规划的研究基础。 第四章:研究基于机器学习的隧道开挖面五类表面的分割问题,主要目标是裁剪 出待喷涂面。()首先分析常用的点云分割问题类型及方法,确定了要采用机器学习 分类方法进行区域分割,并简单介绍了常用分类器;(2)借鉴Voxnet深度学习方法, 提出用点云体素网格内随机采样生成点云团块特征,并给出基于点云通用局部3D特 性及隧道特有结构特性的15种特征指标,对TES-STES-U数据集进行体素样本划分 及特征提取从而得到5类样本数据:(3)接着进行模型训练,采用随机搜索获取超参 数,比较6种常用分类器的准确率,选择xgboost作为分类器并采用yp©ropt自动调 参,根据特征重要性进行特征筛选并再次调参,得到最优分类准确率882%:(4)为 优化分割边缘,采用欧式聚类方法对五类区域逐个清理离群点,然后依据隧道沿轴线 分布的特性,提出基于隧道点云切片中待喷涂面点与己喷涂面点的相对数量,对具有 一定渐变特性的两类分区直接裁剪。最终获得边缘较为清晰的五类表面的分割效果。 8
硕士学位论文 第 1 章 绪论 8 本文课题来源于合作企业的横向课题,内容为全自动智能喷浆机器人的研发。基 于合作企业提供的喷浆机型号,给出一套完整的适用于任意截面隧道的开挖面的结构 检测系统,包括传感器硬件系统设计安装与数据集参数框架,并解决整个系统中的四 个重点问题。通过结合隧道固有特性,综合采用多种点云处理方法,对施工中的带有 支护结构的隧道点云进行必要的结构检测,最终得到有钢拱及超欠挖区域标注的可直 接用于隧道喷涂自动规划的点云数据。本文以三维点云在隧道开挖面结构识别中的应 用为出发点,所研究的内容对于工程应用及学术研究均有重要价值,可推广应用于文 物修复、建筑轮廓、路缘检测、点云压缩、点云配准、逆向工程等多个应用领域。 本文主要结构安排如下: 第一章:绪论。首先说明本文研究问题的重要性;然后介绍研究对象的结构及问 题;接着进行文献调研,说明目前该领域国内外的研究现状;最后介绍本项目的技术 路线及从中衍生出的主要问题及研究路线。 第二章:介绍本文所用的软硬件系统基本设计。首先介绍硬件设备的选型、安装、 标定及使用;然后介绍单台阶面圆形隧道开挖面数据集的获取及包含的主要信息;最 后介绍数据的预处理得到的数据集 TES-S 及扩增得到的非标数据集 TES-U。 第三章:研究非标准截面轮廓的隧道轴线的提取问题,主要目标是对有末端掌子 面且截面不规则的隧道点云提出通用的轴线提取方法。(1) 首先介绍了轴线提取的常 用 RANSAC 方法的原理及不足;(2) 借鉴逆向工程中的拉伸线提取方法,提出通过最 小化点云的投影密度方差(本文简称 PDV)来获取隧道轴线;(3) 提出通过变尺度的网 格搜索方法快速获取轴线最优解;(4) 通过在 TES-U 数据集的实验证明了方法的准确 性达到 1°以内,并在 TES-S 数据集上与 RANSAC 方法进行对比,证明本文方法的 稳定性。本文对隧道轴线的提取不仅用于隧道施工面的监测,也是隧道开挖面的分割、 钢拱提取、超欠挖计算及喷浆规划的研究基础。 第四章:研究基于机器学习的隧道开挖面五类表面的分割问题,主要目标是裁剪 出待喷涂面。(1) 首先分析常用的点云分割问题类型及方法,确定了要采用机器学习 分类方法进行区域分割,并简单介绍了常用分类器;(2) 借鉴 Voxnet 深度学习方法, 提出用点云体素网格内随机采样生成点云团块特征,并给出基于点云通用局部 3D 特 性及隧道特有结构特性的 15 种特征指标,对 TES-S/TES-U 数据集进行体素样本划分 及特征提取从而得到 5 类样本数据;(3) 接着进行模型训练,采用随机搜索获取超参 数,比较 6 种常用分类器的准确率,选择 xgboost 作为分类器并采用 Hyperopt 自动调 参,根据特征重要性进行特征筛选并再次调参,得到最优分类准确率 88.2%;(4) 为 优化分割边缘,采用欧式聚类方法对五类区域逐个清理离群点,然后依据隧道沿轴线 分布的特性,提出基于隧道点云切片中待喷涂面点与已喷涂面点的相对数量,对具有 一定渐变特性的两类分区直接裁剪。最终获得边缘较为清晰的五类表面的分割效果
硕士学位论文 第1章绪论 第五章:基于已知隧道轴向,研究非标轮廓隧道的待喷涂面上UV1三型隧道钢 拱点云通用的钢拱精确提取方法,主要目标是完整逐条地提取出全部钢拱,同时解决 有点云缺失的钢拱区域的插值接续问题。()首先进行可行方法的调研,自行给出7 种潜在可行方案;(②)借鉴前人对区域生长法的改进方式,增加隧道结构特性约束条 件,提出一种依据局部凹凸显著性判断邻域点的定向边缘生长方法(本文简称DEG)实 现隧道点云钢拱区域提取及插值:(3)设计定性与定量试验,将DEG方法与5种潜在 可行方案进行对比,证明DEG方法优于其他方案,检测精确度、召回率分别达到92.8% 和89.5%,并且通过加入不同程度的高斯噪声证明了本文方法在工程应用中的抗干扰 能力。当前关于钢拱检测的研究较少,本文的研究无论在理论还是实践上都具有一定 的创新价值。 第六章:基于已知轴向与钢拱分布,研究非标轮廓隧道的待喷涂面上超欠挖量检 测方法,主要目标是获得包括超欠挖在内的用于喷涂规划的各层区域的面积和体积。 ()首先简要介绍既有的超欠挖检测方法流程及本文相应的主要创新点与方法改进: (2)提出基于隧道轴向栅格投影点数累积矩阵及其极坐标下的列极值点获得隧道轮 廓,并在极坐标下对该轮廓进行平滑:(3)提出一种任意轮廓隧道点到平面上的映射 关系,将隧道点云中所有点在极坐标下搜索对应轮廓上的最近邻点,根据对应关系获 得展平后的位置坐标:(4)展平后,根据DEG搜索得到的钢拱区域最优点拟合平面得 到目标喷涂面以及喷涂距离差,再采用k近邻搜索及DW规则网格内插法将距高差 插值为深度图像:(⑤)采用一系列传统图像处理方法分层依次处理深度图像,先通过 闭运算聚合小型超挖,然后将钢拱区域膨胀作为蒙版切割拱间区域,进而获取面积较 大的连通域归类为当前层,小型连通域则归类于下一层继续参与分割。(6)最后通过 与手动标注对比评估超欠挖检测的差值,主要是评估点云展开、拟合、插值一系列操 作带来的总体误差情况。实验证明本文非标轮廓展开方法得到的深度图像超欠挖检测 差值与标准圆柱轮廓柱面展开的结果近似,具有一定的实用性及准确度。(⑦)最后, 本章给出了用于隧道喷涂规划的开挖面结构识别最终效果。 第七章:本章对全文进行总结,然后介绍了全文的创新点、不足、应用前景及未 来研究展望。 1.4本章小结 本章对自动化喷浆机在隧道开挖面场景下的环境感知情况进行了介绍和分析,并 从中提炼出四个关键的研究性问题。通过调研因内外对于隧道点云去噪、轴线检测, 特征检测、超欠挖检测等几个方面的研究现状,探究当前关于隧道开挖面的检测方法, 并由此验证该研究领域存在的研究空白。最后介绍了本文的主要研究内容及全文结构 安排。 9
硕士学位论文 第 1 章 绪论 9 第五章:基于已知隧道轴向,研究非标轮廓隧道的待喷涂面上 U/V/I 三型隧道钢 拱点云通用的钢拱精确提取方法,主要目标是完整逐条地提取出全部钢拱,同时解决 有点云缺失的钢拱区域的插值接续问题。(1) 首先进行可行方法的调研,自行给出 7 种潜在可行方案;(2) 借鉴前人对区域生长法的改进方式,增加隧道结构特性约束条 件,提出一种依据局部凹凸显著性判断邻域点的定向边缘生长方法(本文简称 DEG)实 现隧道点云钢拱区域提取及插值;(3) 设计定性与定量试验,将 DEG 方法与 5 种潜在 可行方案进行对比,证明 DEG 方法优于其他方案,检测精确度、召回率分别达到 92.8% 和 89.5%,并且通过加入不同程度的高斯噪声证明了本文方法在工程应用中的抗干扰 能力。当前关于钢拱检测的研究较少,本文的研究无论在理论还是实践上都具有一定 的创新价值。 第六章:基于已知轴向与钢拱分布,研究非标轮廓隧道的待喷涂面上超欠挖量检 测方法,主要目标是获得包括超欠挖在内的用于喷涂规划的各层区域的面积和体积。 (1) 首先简要介绍既有的超欠挖检测方法流程及本文相应的主要创新点与方法改进; (2) 提出基于隧道轴向栅格投影点数累积矩阵及其极坐标下的列极值点获得隧道轮 廓,并在极坐标下对该轮廓进行平滑;(3) 提出一种任意轮廓隧道点到平面上的映射 关系,将隧道点云中所有点在极坐标下搜索对应轮廓上的最近邻点,根据对应关系获 得展平后的位置坐标;(4) 展平后,根据 DEG 搜索得到的钢拱区域最优点拟合平面得 到目标喷涂面以及喷涂距离差,再采用 k 近邻搜索及 IDW 规则网格内插法将距离差 插值为深度图像;(5) 采用一系列传统图像处理方法分层依次处理深度图像,先通过 闭运算聚合小型超挖,然后将钢拱区域膨胀作为蒙版切割拱间区域,进而获取面积较 大的连通域归类为当前层,小型连通域则归类于下一层继续参与分割。(6) 最后通过 与手动标注对比评估超欠挖检测的差值,主要是评估点云展开、拟合、插值一系列操 作带来的总体误差情况。实验证明本文非标轮廓展开方法得到的深度图像超欠挖检测 差值与标准圆柱轮廓柱面展开的结果近似,具有一定的实用性及准确度。(7) 最后, 本章给出了用于隧道喷涂规划的开挖面结构识别最终效果。 第七章:本章对全文进行总结,然后介绍了全文的创新点、不足、应用前景及未 来研究展望。 1.4 本章小结 本章对自动化喷浆机在隧道开挖面场景下的环境感知情况进行了介绍和分析,并 从中提炼出四个关键的研究性问题。通过调研国内外对于隧道点云去噪、轴线检测、 特征检测、超欠挖检测等几个方面的研究现状,探究当前关于隧道开挖面的检测方法, 并由此验证该研究领域存在的研究空白。最后介绍了本文的主要研究内容及全文结构 安排
硕士学位论文 第2章隧道数据采集装置及数据集的建立 第2章隧道数据采集装置及数据集的建立 2.1数据采集设备设计 2.1.1隧道三维扫描监测设备选型 (1)隧道环境特点 施工隧道工况恶劣的挑战,其数据采集的局限性主要有以下几点: ①隧道施工现场混凝土反弹率较大,时有落沙落石,粉尘浓度较大,空气 能见度较低。由于空气多尘和缺乏照明条件,隧道能见度很低。此外,隧道中湿 度大,有渗水,有施工机械的振动,对于设备防护性、抗干扰性要求较高: ②隧道内部是一种环绕型的大型空间,因此数据扫描需要360度视图或多 视图注册,而且需要满足一定的测量距离,一般不低于30m: ③在数据采集过程中,钢拱不可避免地会遮挡隧道后壁,造成数据丢失。 采集设备最好能具有可移动性: ④在隧道施工现场,非工作人员很少被允许进入,停留时间也很有限,以 免耽误施工进度。因此数据采集用时不宜过长,采集机会也较少。 因此,全自动喷浆机需要搭配一套精度较高、抗干扰能力与防护能力较强的 隧道开挖面扫描监测系统。根据喷浆机的作业方式和作业环境,为实现三维重建 与隧道喷浆一体化,需要将扫描设备安装在喷浆机械臂上并跟随臂架移动,从而 减少障碍物遮挡、增大扫描范围。因此要求扫描设备成本较低、可供消耗,体积 轻便,易于防护、移动和定位,抗粉尘、精密度高。 (2)设备选型 随着三维测量技术发展,设备生产成本降低,高精度传感器逐渐推广。当前 隧道三维数据监测通常使用RGB单目/双目相机、全站仪或激光扫描仪等设备. 传统隧道探测方法利用全站仪定位钢拱架5网上的多个测点。目前也有一些研究人 员使用激光雷达(光探测和测距)和RGB摄像机来检测隧道5)。 考虑到隧道施工环境,本文通过对比表21所示的五种五种非接触式测量仪 器,分析出激光雷达在施工过程隧道环境探测中具有的优势,因此选其作为为采 集设备
硕士学位论文 第 2 章 隧道数据采集装置及数据集的建立 10 第 2 章 隧道数据采集装置及数据集的建立 2.1 数据采集设备设计 2.1.1 隧道三维扫描监测设备选型 (1)隧道环境特点 施工隧道工况恶劣的挑战,其数据采集的局限性主要有以下几点: 1 隧道施工现场混凝土反弹率较大,时有落沙落石,粉尘浓度较大,空气 能见度较低。由于空气多尘和缺乏照明条件,隧道能见度很低。此外,隧道中湿 度大,有渗水,有施工机械的振动,对于设备防护性、抗干扰性要求较高; 2 隧道内部是一种环绕型的大型空间,因此数据扫描需要 360 度视图或多 视图注册,而且需要满足一定的测量距离,一般不低于 30m; 3 在数据采集过程中,钢拱不可避免地会遮挡隧道后壁,造成数据丢失。 采集设备最好能具有可移动性; 4 在隧道施工现场,非工作人员很少被允许进入,停留时间也很有限,以 免耽误施工进度。因此数据采集用时不宜过长,采集机会也较少。 因此,全自动喷浆机需要搭配一套精度较高、抗干扰能力与防护能力较强的 隧道开挖面扫描监测系统。根据喷浆机的作业方式和作业环境,为实现三维重建 与隧道喷浆一体化,需要将扫描设备安装在喷浆机械臂上并跟随臂架移动,从而 减少障碍物遮挡、增大扫描范围。因此要求扫描设备成本较低、可供消耗,体积 轻便,易于防护、移动和定位,抗粉尘、精密度高。 (2) 设备选型 随着三维测量技术发展,设备生产成本降低,高精度传感器逐渐推广。当前 隧道三维数据监测通常使用 RGB 单目/双目相机、全站仪或激光扫描仪等设备.。 传统隧道探测方法利用全站仪定位钢拱架[50]上的多个测点。目前也有一些研究人 员使用激光雷达(光探测和测距)和 RGB 摄像机来检测隧道[51]。 考虑到隧道施工环境,本文通过对比表 2-1 所示的五种五种非接触式测量仪 器,分析出激光雷达在施工过程隧道环境探测中具有的优势,因此选其作为为采 集设备