
第7章数字系统的结构■IR数字滤波器的基本结构■FIR数字滤波器的基本结构■格型结构■数字滤波器结构的MATLAB实现7.1IIR数字滤波器的基本结构■直接型结构■级联型结构■并联型结构、IIR数字滤波器的直接型结构M2b"N1Y(a)i=0Zb2H,(z)=H(2):NW(=)i=01+a,--j1+Za,--ij=1j=lW(=)H,(2)=X()w[k]=box[k]+b,x[k-1]+...+bwx[k-M]J[k]=w[k]-a,x[k-]]-a,x[k-2]-...-avx[k-N]直接I型结构设M-Nw[k]= box[k]+b,x[k-1]+...+brx[k-N]y[k]=w[k]-a,x[k-]-a,x[k-2]-...-a[k-N]w[k]y[k][K]64-αib2- a2-...2an-!bNan购
第 7 章 数字系统的结构 ◼ IIR 数字滤波器的基本结构 ◼ FIR 数字滤波器的基本结构 ◼ 格型结构 ◼ 数字滤波器结构的 MATLAB 实现 7.1 IIR 数字滤波器的基本结构 ◼ 直接型结构 ◼ 级联型结构 ◼ 并联型结构 一、IIR 数字滤波器的直接型结构 = − = − + = N j j j M i i i a z b z H z 1 0 1 ( ) = = − − + = N j j j M i i i a z b z 1 0 1 1 ( ) ( ) ( ) 2 W z Y z H z = ( ) ( ) ( ) 1 X z W z H z = [ ] [ ] [ 1] [ ] w k = b0 x k +b1 x k − ++bN x k − M [ ] [ ] [ 1] [ 2] [ ] y k = w k − a1 x k − − a2 x k − −− aN x k − N 直接 I 型结构 设 M=N [ ] [ ] [ 1] [ ] w k = b0 x k +b1 x k − ++bN x k − N [ ] [ ] [ 1] [ 2] [ ] y k = w k − a1 x k − − a2 x k − −− aN x k − N − a2 − a1 − aN −1 N − aN b b2 b1 −1 z y[k] −1 z −1 z −1 z b0 −1 z −1 z −1 z −1 z x[k] w[k]
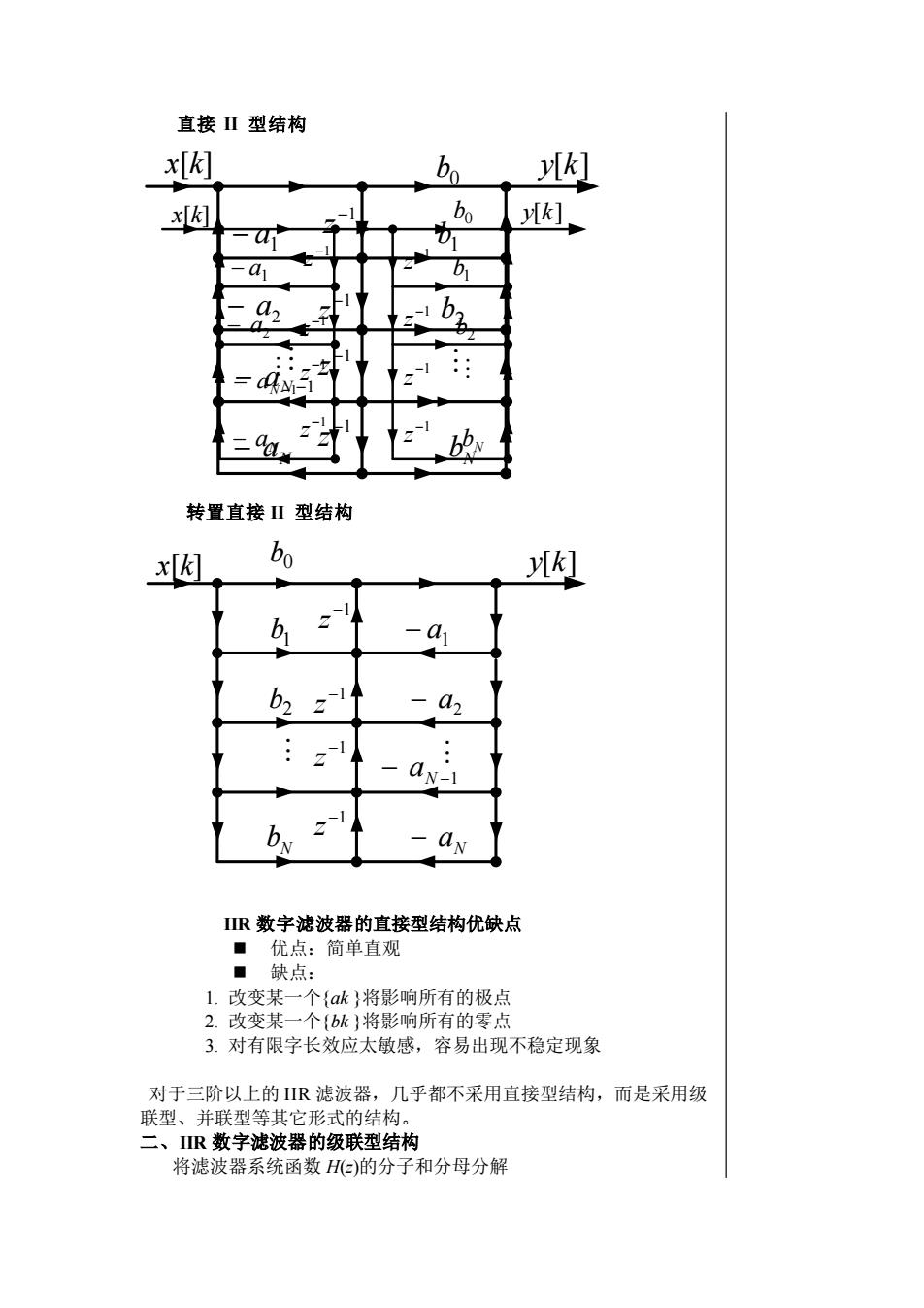
直接IⅡI型结构x[k]y[k]bobo[k]x[k]Daibiaiba2-4: :cNi-Z7bhn=a福转置直接ⅡI型结构boy[k]x[k]b,ayb2a2V-1anIIR数字滤波器的直接型结构优缺点■优点:简单直观■缺点:1.改变某一个ak!将影响所有的极点2.改变某一个(bk)将影响所有的零点3.对有限字长效应太敏感,容易出现不稳定现象对于三阶以上的IIR滤波器,几乎都不采用直接型结构,而是采用级联型、并联型等其它形式的结构。二、IIR数字滤波器的级联型结构将滤波器系统函数H(=)的分子和分母分解
直接 II 型结构 − a2 − a1 − aN −1 − aN bN b2 b1 −1 z y[k] −1 z −1 z −1 z b0 x[k] − a2 − a1 − aN −1 − aN bNb2 b1 −1 z y[k] −1 z −1 z −1 z b0 −1 z −1 z −1 z −1 z x[k] 转置直接 II 型结构 − a2 − a1 − aN −1 N − aN b b2 b1 −1 z y[k] −1 z −1 z −1 z x b0 [k] IIR 数字滤波器的直接型结构优缺点 ◼ 优点:简单直观 ◼ 缺点: 1. 改变某一个{ak }将影响所有的极点 2. 改变某一个{bk }将影响所有的零点 3. 对有限字长效应太敏感,容易出现不稳定现象 对于三阶以上的 IIR 滤波器,几乎都不采用直接型结构,而是采用级 联型、并联型等其它形式的结构。 二、IIR 数字滤波器的级联型结构 将滤波器系统函数 H(z)的分子和分母分解
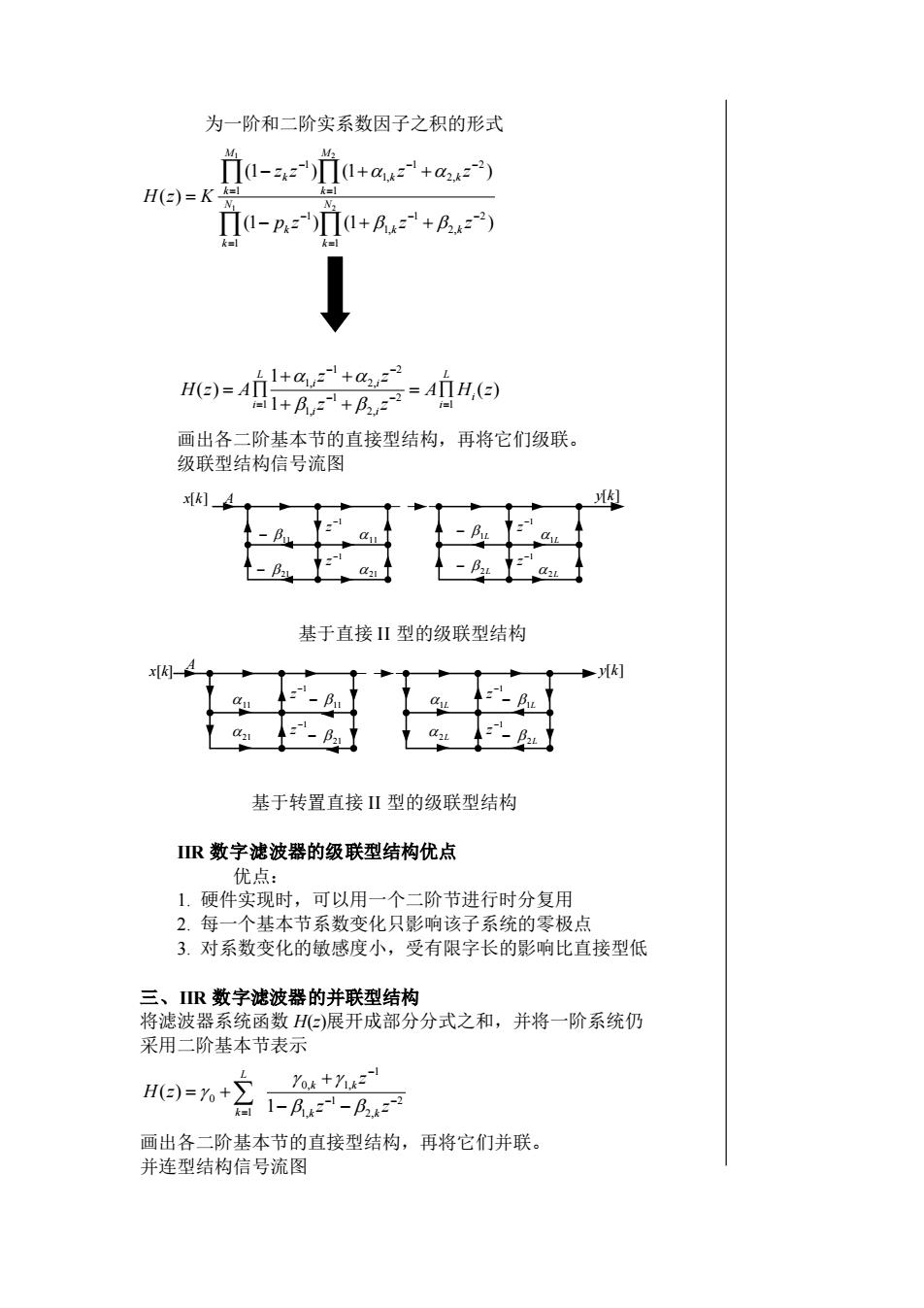
为一阶和二阶实系数因子之积的形式I(1-z,2")(1+αx2- +α2,x-)H(=)=K k(1- Pe=-)(1+ βux-* + β2,±=-)=-+1+α1,--* +α2,--2H()=A=AIIHi1+ β, 2-* + β,,-2-画出各二阶基本节的直接型结构,再将它们级联。级联型结构信号流图K]x[k]_1~-βu-βuauau+2-1β2-B,α21d基于直接II型的级联型结构x[k]-y[k]"-BL-"- βauA- βa-- βalaza2t基于转置直接II型的级联型结构IIR数字滤波器的级联型结构优点优点:1.硬件实现时,可以用一个二阶节进行时分复用2.每一个基本节系数变化只影响该子系统的零极点3.对系数变化的敏感度小,受有限字长的影响比直接型低三、IIR数字滤波器的并联型结构将滤波器系统函数H()展开成部分分式之和,并将一阶系统仍采用二阶基本节表示IYox +Yux-H(=)= + 1 βr,x-l - β2,±=-2画出各二阶基本节的直接型结构,再将它们并联。并连型结构信号流图
为一阶和二阶实系数因子之积的形式 = − − = − = − − = − − + + − + + = 1 2 1 2 1 2 2, 1 1, 1 1 1 2 2, 1 1, 1 1 (1 ) (1 ) (1 ) (1 ) ( ) N k k k N k k M k k k M k k p z z z z z z z H z K ( ) 1 1 ( ) 1 2 2, 1 1, 2 2, 1 1, 1 A H z z z z z H z A i L i i i i i L i = − − − − = = + + + + = 画出各二阶基本节的直接型结构,再将它们级联。 级联型结构信号流图 基于直接 II 型的级联型结构 基于转置直接 II 型的级联型结构 IIR 数字滤波器的级联型结构优点 优点: 1. 硬件实现时,可以用一个二阶节进行时分复用 2. 每一个基本节系数变化只影响该子系统的零极点 3. 对系数变化的敏感度小,受有限字长的影响比直接型低 三、IIR 数字滤波器的并联型结构 将滤波器系统函数 H(z)展开成部分分式之和,并将一阶系统仍 采用二阶基本节表示 2 2, 1 1, 1 0, 1, 1 0 1 ( ) − − − = − − + = + z z z H z k k k k L k 画出各二阶基本节的直接型结构,再将它们并联。 并连型结构信号流图 11 − 11 −1 z y[k] − 21 21 −1 z 1L − 1L −1 z − 2L 2L −1 z A x[k] − 11 11 −1 z x[k] y[k] − 21 21 −1 z − 1L 1L −1 z − 2L 2L −1 z A
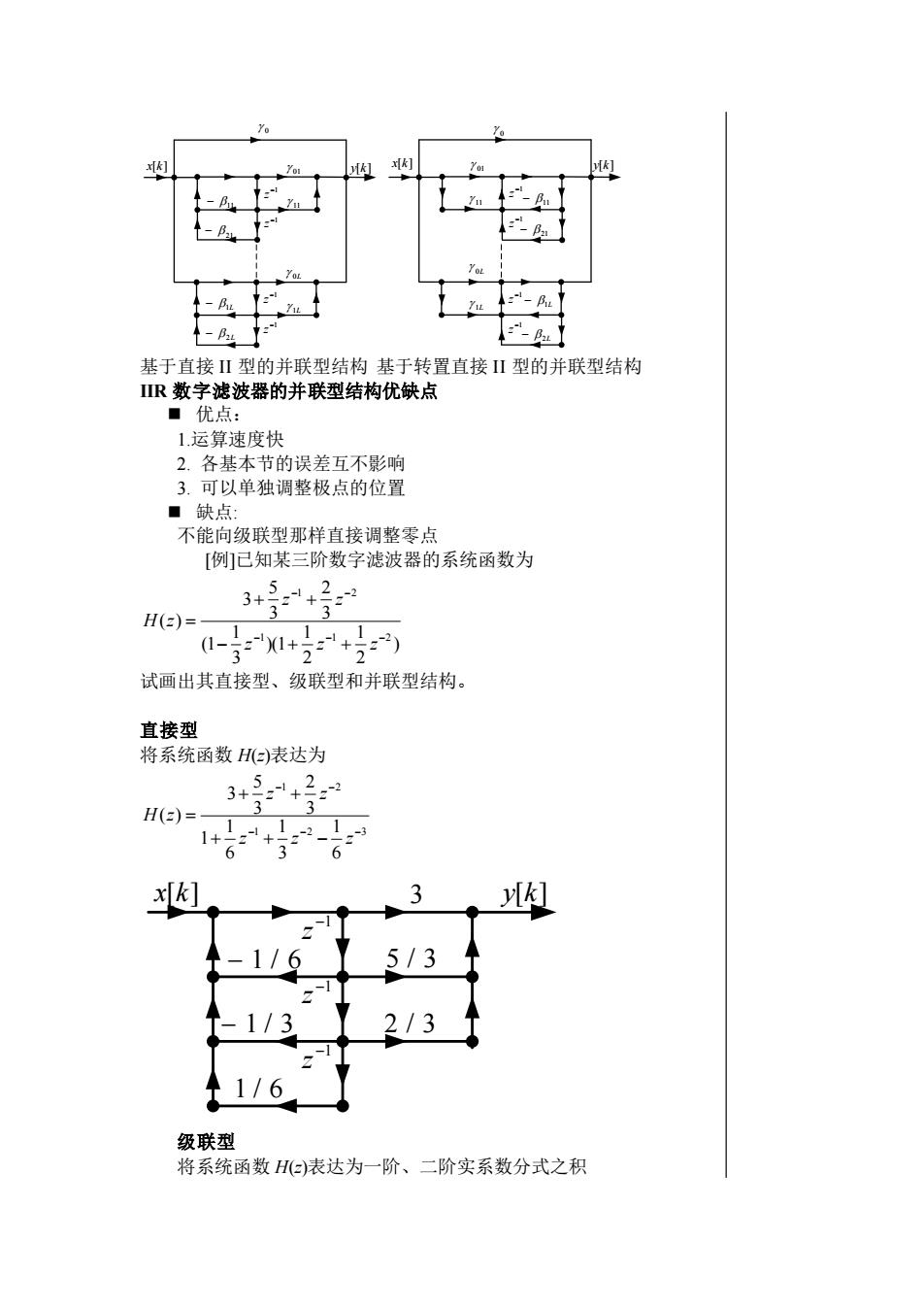
Yox[K][k][k]Y]-- β-YoLY02~--- βu-βuLYut7- βar- βz基于直接II型的并联型结构基于转置直接II型的并联型结构IIR数字滤波器的并联型结构优缺点■优点:1.运算速度快2.各基本节的误差互不影响3.可以单独调整极点的位置■缺点:不能向级联型那样直接调整零点[例]已知某三阶数字滤波器的系统函数为25.I3+-+-233H(-)=-21+(1-一+-222试画出其直接型、级联型和并联型结构。直接型将系统函数H()表达为5-13+11H(-) =1+366x[k]3y[k]Z5 / 31/ 672/3/31/6级联型将系统函数H(2)表达为一阶、二阶实系数分式之积
− 11 01 −1 z x[k] − 21 −1 z y[k] − 1L −1 z − 2L −1 z 0 11 1L 0L − 11 01 −1 z − 21 −1 z y[k] − 1L −1 z − 2L −1 z 0 11 1L 0L x[k] 基于直接 II 型的并联型结构 基于转置直接 II 型的并联型结构 IIR 数字滤波器的并联型结构优缺点 ◼ 优点: 1.运算速度快 2. 各基本节的误差互不影响 3. 可以单独调整极点的位置 ◼ 缺点: 不能向级联型那样直接调整零点 [例]已知某三阶数字滤波器的系统函数为 ) 2 1 2 1 )(1 3 1 (1 3 2 3 5 3 ( ) 1 1 2 1 2 − − − − − − + + + + = z z z z z H z 试画出其直接型、级联型和并联型结构。 直接型 将系统函数 H(z)表达为 1 2 3 1 2 6 1 3 1 6 1 1 3 2 3 5 3 ( ) − − − − − + + − + + = z z z z z H z 级联型 将系统函数 H(z)表达为一阶、二阶实系数分式之积 − 1 / 3 − 1 / 6 1 / 6 2 / 3 5 / 3 −1 z x[k] y[k] −1 z −1 z 3
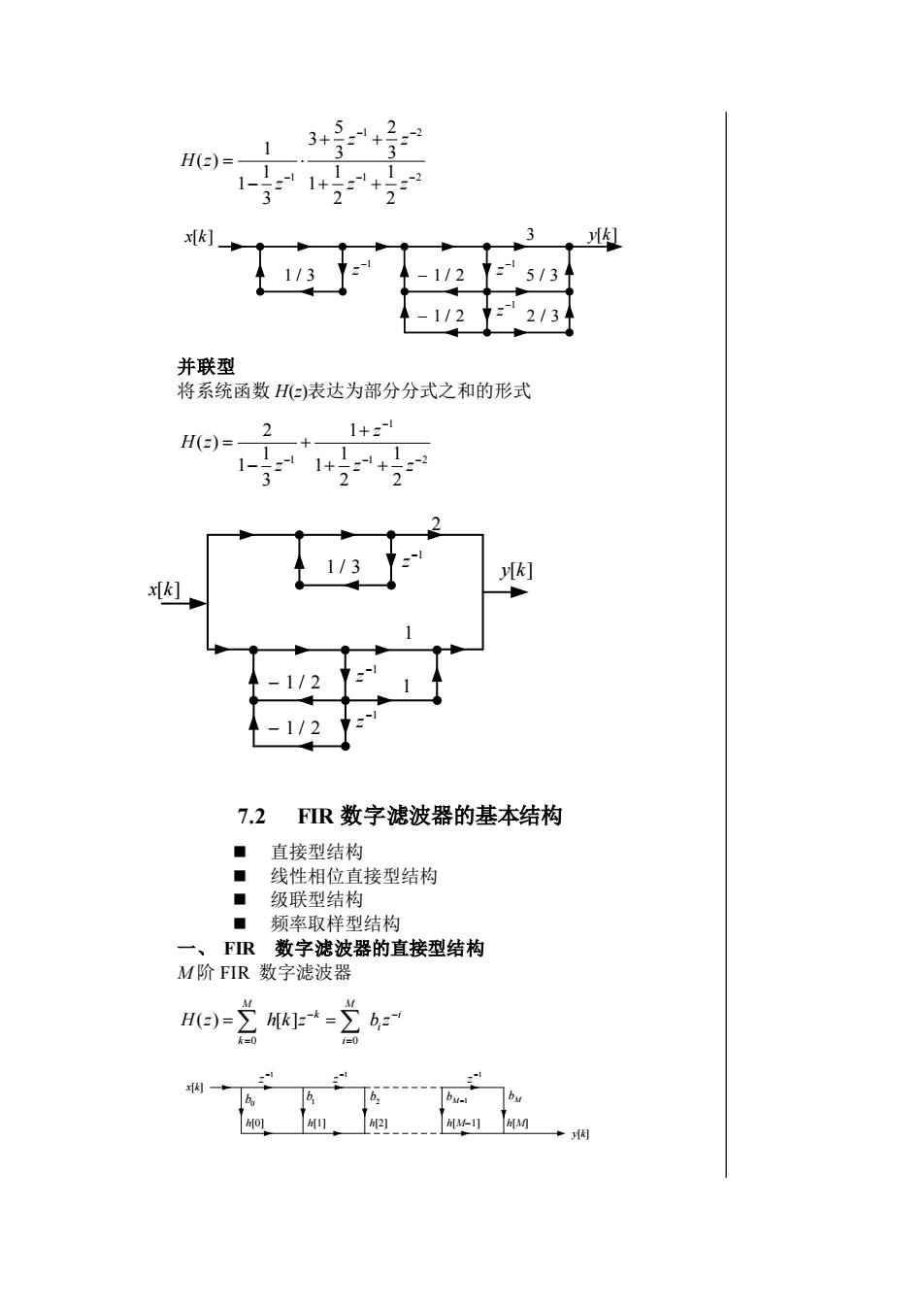
3--3H(-):1-21-1+322y[k]x[k]4-4-1/25/31/32/3-1/2并联型将系统函数H(-)表达为部分分式之和的形式1+ 2~l2H(z)=+11-51/3[k]x[k]1/21/27.2FIR数字滤波器的基本结构直接型结构线性相位直接型结构限级联型结构圆频率取样型结构数字滤波器的直接型结构FIRM阶FIR数字滤波器MMh[k]-k =]H(a)=2Z b,2-ik=0i=0-x[1] -bbbay-1h[0]h[1] [2][M-1][M][]
1 2 1 2 1 2 1 2 1 1 3 2 3 5 3 3 1 1 1 ( ) − − − − − + + + + − = z z z z z H z 并联型 将系统函数 H(z)表达为部分分式之和的形式 1 2 1 1 2 1 2 1 1 1 3 1 1 2 ( ) − − − − + + + + − = z z z z H z 7.2 FIR 数字滤波器的基本结构 ◼ 直接型结构 ◼ 线性相位直接型结构 ◼ 级联型结构 ◼ 频率取样型结构 一、 FIR 数字滤波器的直接型结构 M 阶 FIR 数字滤波器 i i M i k M k H z h k z b z − = − = = = 0 0 ( ) [ ] −1 z −1 z −1 z b0 b1 b2 bM −1 bM x[k] y[k] h[0] h[1] h[2] h[M−1] h[M] 1 / 3 −1 z − 1 / 2 −1 z −1 z 1 − 1 / 2 1 x[k] y[k] 2 1 / 3 −1 z x[k] y[k] − 1 / 2 −1 z −1 z 3 5 / 3 − 1 / 2 2 / 3