
第二章 优化设计的数学基础 机械设计问题一般是非线性规划问题。 实质上是多元非线性函数的极小化问题,因 此,机械优化设计是建立在多元函数的极值 理论基础上的。 机械优化设计问题分为: 无约束优化 约束优化 无条件极值问题 条件极值问题
第二章 优化设计的数学基础 机械设计问题一般是非线性规划问题。 实质上是多元非线性函数的极小化问题,因 此,机械优化设计是建立在多元函数的极值 理论基础上的。 机械优化设计问题分为: 无约束优化 约束优化 无条件极值问题 条件极值问题
第一节 多元函数的方向导数与梯度 一、方向导数 从多元函数的微分学得知,对于一个连续可 微函数f(x)在某一点 x ( ) k 的一阶偏导数为: ( ) 1 ( ) k f x x ( ) 2 ( ) k f x x ( ) ( ) k n f x x , ,. , 它表示函数f(x)值在 点沿各坐标轴方向的变 化率。 ( ) k x 有一个二维函数,如图2-1所示
第一节 多元函数的方向导数与梯度 一、方向导数 从多元函数的微分学得知,对于一个连续可 微函数f(x)在某一点 x ( ) k 的一阶偏导数为: ( ) 1 ( ) k f x x ( ) 2 ( ) k f x x ( ) ( ) k n f x x , ,. , 它表示函数f(x)值在 点沿各坐标轴方向的变 化率。 ( ) k x 有一个二维函数,如图2-1所示
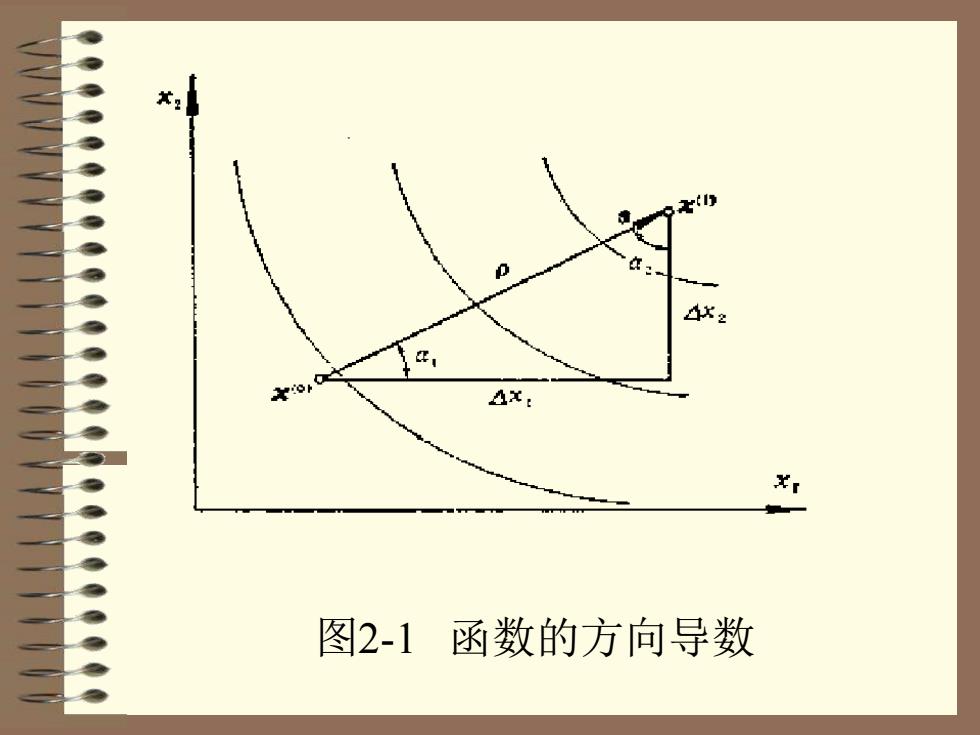
图2-1 函数的方向导数
图2-1 函数的方向导数
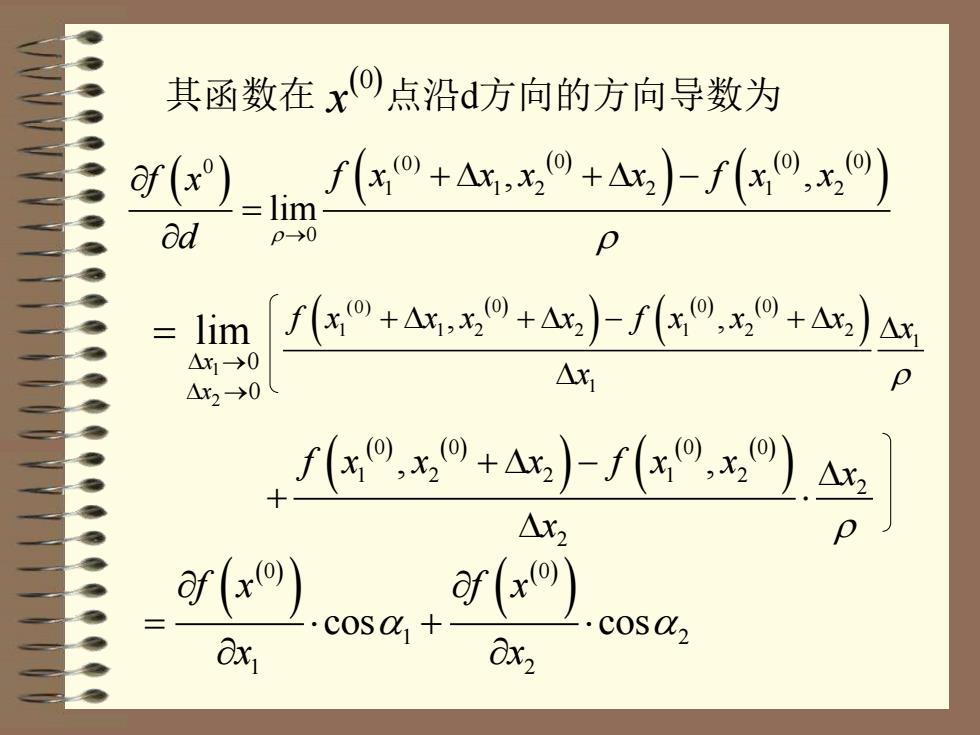
其函数在 ( ) 点沿d方向的方向导数为 0 x ( ) ( ) ( ) ( ) ( ) (0) 0 0 0 1 1 2 2 1 2 2 1 1 f x x x x f x x x , , x x + + − + 1 2 0 0 lim x x → → = ( ) ( ) ( ) ( ) ( ) ( ) 0 0 0 0 1 2 2 1 2 2 2 f x x x f x x , , x x + − + ( ) ( ) ( ) ( ) 0 0 1 2 1 2 cos cos f x f x x x = + ( ) ( ) ( ) ( ) ( ) ( ) (0) 0 0 0 0 1 1 2 2 1 2 0 , , lim f x f x x x x f x x d → + + − =
其函数在 ( ) 点沿d方向的方向导数为 0 x ( ) ( ) ( ) ( ) ( ) (0) 0 0 0 1 1 2 2 1 2 2 1 1 f x x x x f x x x , , x x + + − + 1 2 0 0 lim x x → → = ( ) ( ) ( ) ( ) ( ) ( ) 0 0 0 0 1 2 2 1 2 2 2 f x x x f x x , , x x + − + ( ) ( ) ( ) ( ) 0 0 1 2 1 2 cos cos f x f x x x = + ( ) ( ) ( ) ( ) ( ) ( ) (0) 0 0 0 0 1 1 2 2 1 2 0 , , lim f x f x x x x f x x d → + + − =
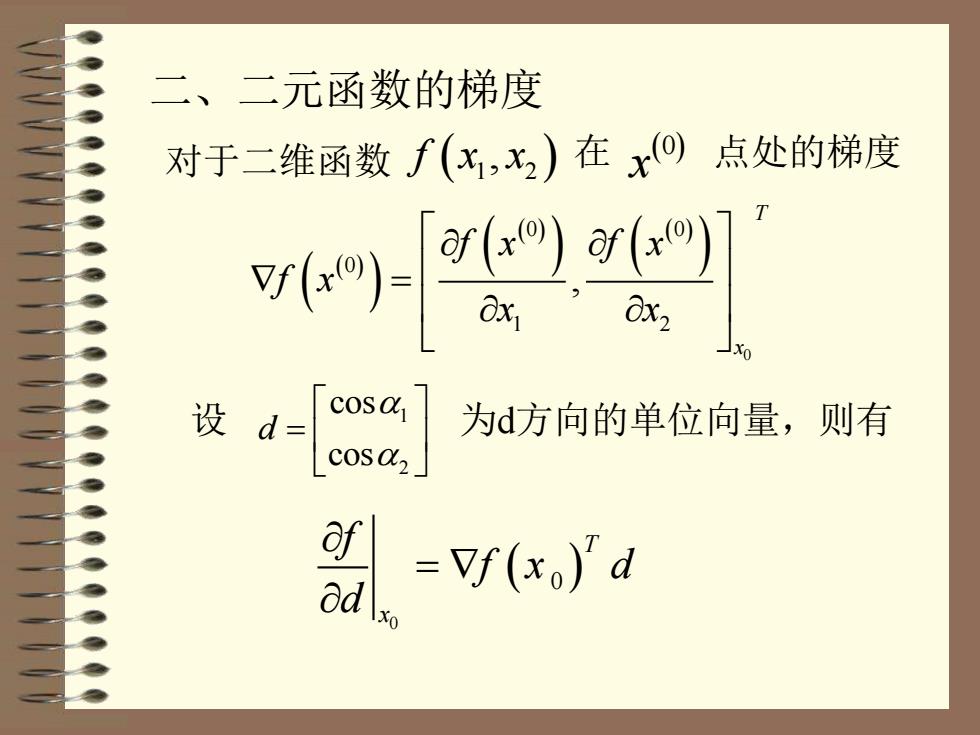
二、二元函数的梯度 对于二维函数 f x x ( 1 2 , ) 在 (0) x 点处的梯度 ( ) ( ) ( ) ( ) ( ) ( ) 0 0 0 0 1 2 , T x f x f x f x x x = 设 1 2 cos cos d = 为d方向的单位向量,则有 ( ) 0 0 T x f f x d d =
二、二元函数的梯度 对于二维函数 f x x ( 1 2 , ) 在 (0) x 点处的梯度 ( ) ( ) ( ) ( ) ( ) ( ) 0 0 0 0 1 2 , T x f x f x f x x x = 设 1 2 cos cos d = 为d方向的单位向量,则有 ( ) 0 0 T x f f x d d =