
第四章 驱动型耕整地机械 驱动型耕整地机械是由拖拉机动力输出轴驱动工作部件进行工作的,目前应用较多的是旋耕机。 旋耕机具有犁耙合一的作业效果,旋耕一次即可达到土碎地平,在水田中带水旋耕后即可直接插 秧。它能有效地切断植被并将其混合于耕作层中,也能使化肥、农药等在土中均匀混合。旋耕机 作业质量好、工效高,既能抢农时、节省劳力,又可减少机器下地次数,减轻行走部件对土壤的 压实,在我国南北方均有广泛使用。尤其是在南方水田地区,春耕、夏耕、双抢、秋耕各个季节 都能使用,较好地满足农业生产的要求。 第一节旋耕机构造及工作过程 旋耕机主要由机架、传动装置、刀辊、挡土罩及平土拖板组成(图 4—1)。 机架机架包括齿轮箱壳体,左、右主梁,侧板及侧边传动箱壳体。采用中间传动的旋耕机,左、 右主梁长度相同。侧边传动的旋耕机,因侧边传动箱较重,故传递动力一侧的主梁较短,这样有 利于整机平衡。主梁上还装有悬挂架,以便与拖拉机连接。 旋耕机与拖拉机的连接方式,主要有悬挂式和直接连接式两种。悬挂式多用于大中型拖拉机,直 接连接式用于小型及手扶拖拉机,它是用螺钉把齿轮箱壳体直接固定在拖拉机上。 图 4—1 旋耕机的构造 1.主梁 2.悬挂架 3.齿轮箱 4.侧边传动箱 5.平土拖板 6.挡土罩 7.撑杆 8.刀轴 9.旋耕 刀 传动装置传动装置包括齿轮箱、侧边传动箱或中间传动箱。拖拉机的动力传至齿轮箱后,再经侧 边传动箱或中间传动箱驱动刀轴。传动方式有侧边链轮传动、侧边齿轮传动和中间传动三种形式 (图 4—2)。链轮传动零件数目少、重量轻、结构简单,但链条易磨损断裂,使用寿命短。齿轮 传动可靠性好,但加工精度高,制造复杂,成本贵。耕幅较窄的旋耕机多采用侧边传动,耕幅较 宽的旋耕机则用中间传动,但中间传动箱下部会造成漏耕,影响作业质量。为解决这个问题,可 在传动箱下面装一把松土铲或采用其它防漏耕装置
第四章 驱动型耕整地机械 驱动型耕整地机械是由拖拉机动力输出轴驱动工作部件进行工作的,目前应用较多的是旋耕机。 旋耕机具有犁耙合一的作业效果,旋耕一次即可达到土碎地平,在水田中带水旋耕后即可直接插 秧。它能有效地切断植被并将其混合于耕作层中,也能使化肥、农药等在土中均匀混合。旋耕机 作业质量好、工效高,既能抢农时、节省劳力,又可减少机器下地次数,减轻行走部件对土壤的 压实,在我国南北方均有广泛使用。尤其是在南方水田地区,春耕、夏耕、双抢、秋耕各个季节 都能使用,较好地满足农业生产的要求。 第一节旋耕机构造及工作过程 旋耕机主要由机架、传动装置、刀辊、挡土罩及平土拖板组成(图 4—1)。 机架机架包括齿轮箱壳体,左、右主梁,侧板及侧边传动箱壳体。采用中间传动的旋耕机,左、 右主梁长度相同。侧边传动的旋耕机,因侧边传动箱较重,故传递动力一侧的主梁较短,这样有 利于整机平衡。主梁上还装有悬挂架,以便与拖拉机连接。 旋耕机与拖拉机的连接方式,主要有悬挂式和直接连接式两种。悬挂式多用于大中型拖拉机,直 接连接式用于小型及手扶拖拉机,它是用螺钉把齿轮箱壳体直接固定在拖拉机上。 图 4—1 旋耕机的构造 1.主梁 2.悬挂架 3.齿轮箱 4.侧边传动箱 5.平土拖板 6.挡土罩 7.撑杆 8.刀轴 9.旋耕 刀 传动装置传动装置包括齿轮箱、侧边传动箱或中间传动箱。拖拉机的动力传至齿轮箱后,再经侧 边传动箱或中间传动箱驱动刀轴。传动方式有侧边链轮传动、侧边齿轮传动和中间传动三种形式 (图 4—2)。链轮传动零件数目少、重量轻、结构简单,但链条易磨损断裂,使用寿命短。齿轮 传动可靠性好,但加工精度高,制造复杂,成本贵。耕幅较窄的旋耕机多采用侧边传动,耕幅较 宽的旋耕机则用中间传动,但中间传动箱下部会造成漏耕,影响作业质量。为解决这个问题,可 在传动箱下面装一把松土铲或采用其它防漏耕装置

图 4—2 旋耕机的传动 (a)侧边链轮传动(b)侧边齿轮传动(c)中间传动 在悬挂式旋耕机上,拖拉机动力输出轴通过双万向节把动力传递给齿轮箱。为适应旋耕机升降及 深浅调节的需要,万向节的传动轴(中间轴)采用能在方套管内自由伸缩的方轴。安装万向节时, 应使方轴及方套管的夹叉位于同一平面内,如方向装错,易使旋耕机振动加大并损坏机件。 为适应不同的作业要求,有时需要改变旋耕机刀轴的转速。变速的方法是更换传动齿轮或链轮, 也可以在齿轮箱外设变速杆或使拖拉机动力输出轴有多个档位,用换档的方式变速。 刀辊刀辊由刀轴及安装在刀轴上的旋耕刀组成,亦称刀滚。刀轴有整体式和组合式两种,组合式 刀轴由多节管轴通过接盘连接而成(图 4—3),其特点是通用性好,可以根据不同的幅宽要求进 行组合。旋耕刀在刀轴上的安装有刀座和刀盘两种形式,刀座又有直线型和曲线型两种(图 4-4), 曲线型刀座滑草性能好但制造工艺复杂。用刀座安装旋耕刀时,每个刀座只装一把刀片;用刀盘 安装旋耕刀时,每个刀盘可根据不同需要安装多把刀片。 图 4—3 组合式刀轴
图 4—2 旋耕机的传动 (a)侧边链轮传动(b)侧边齿轮传动(c)中间传动 在悬挂式旋耕机上,拖拉机动力输出轴通过双万向节把动力传递给齿轮箱。为适应旋耕机升降及 深浅调节的需要,万向节的传动轴(中间轴)采用能在方套管内自由伸缩的方轴。安装万向节时, 应使方轴及方套管的夹叉位于同一平面内,如方向装错,易使旋耕机振动加大并损坏机件。 为适应不同的作业要求,有时需要改变旋耕机刀轴的转速。变速的方法是更换传动齿轮或链轮, 也可以在齿轮箱外设变速杆或使拖拉机动力输出轴有多个档位,用换档的方式变速。 刀辊刀辊由刀轴及安装在刀轴上的旋耕刀组成,亦称刀滚。刀轴有整体式和组合式两种,组合式 刀轴由多节管轴通过接盘连接而成(图 4—3),其特点是通用性好,可以根据不同的幅宽要求进 行组合。旋耕刀在刀轴上的安装有刀座和刀盘两种形式,刀座又有直线型和曲线型两种(图 4-4), 曲线型刀座滑草性能好但制造工艺复杂。用刀座安装旋耕刀时,每个刀座只装一把刀片;用刀盘 安装旋耕刀时,每个刀盘可根据不同需要安装多把刀片。 图 4—3 组合式刀轴
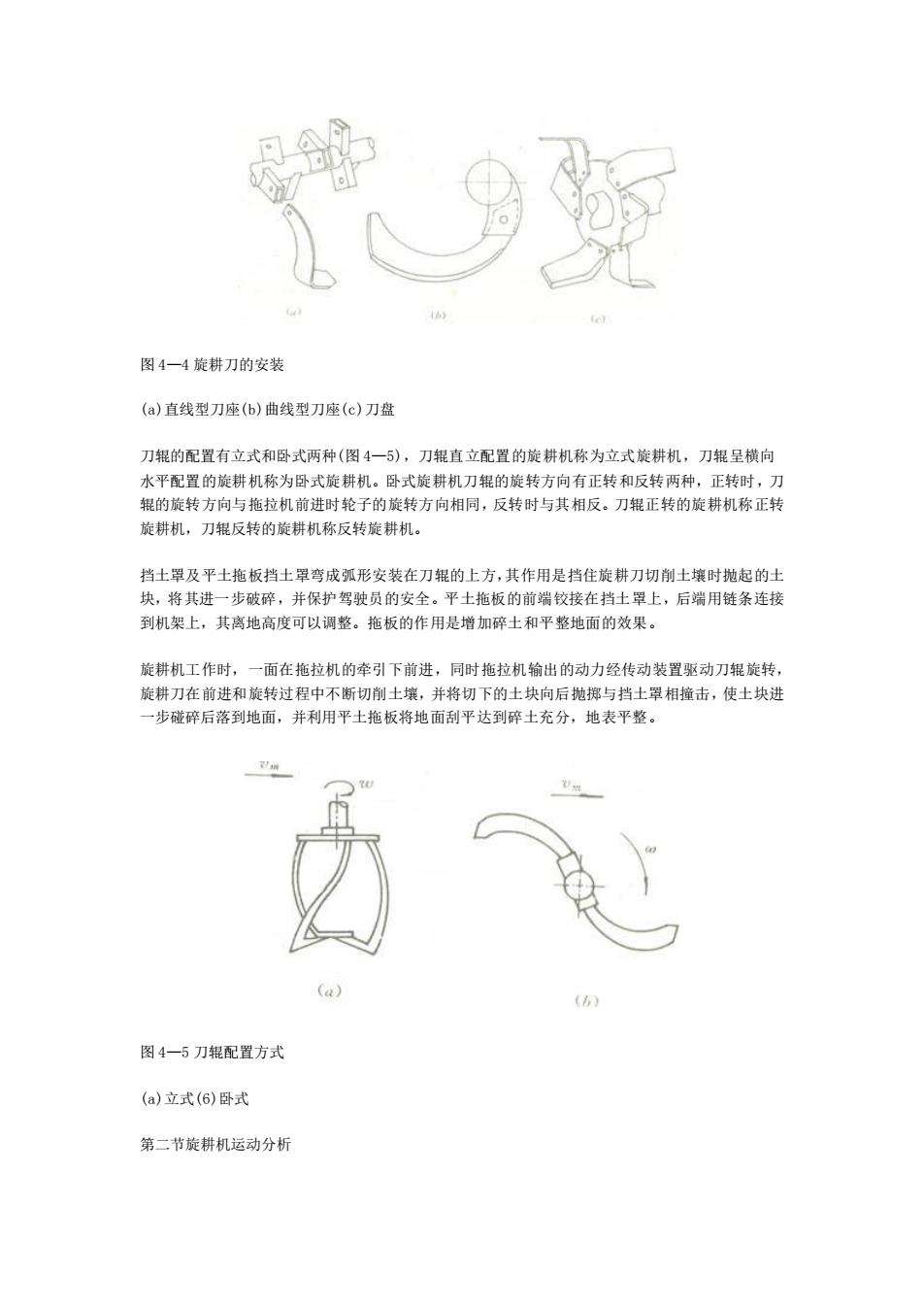
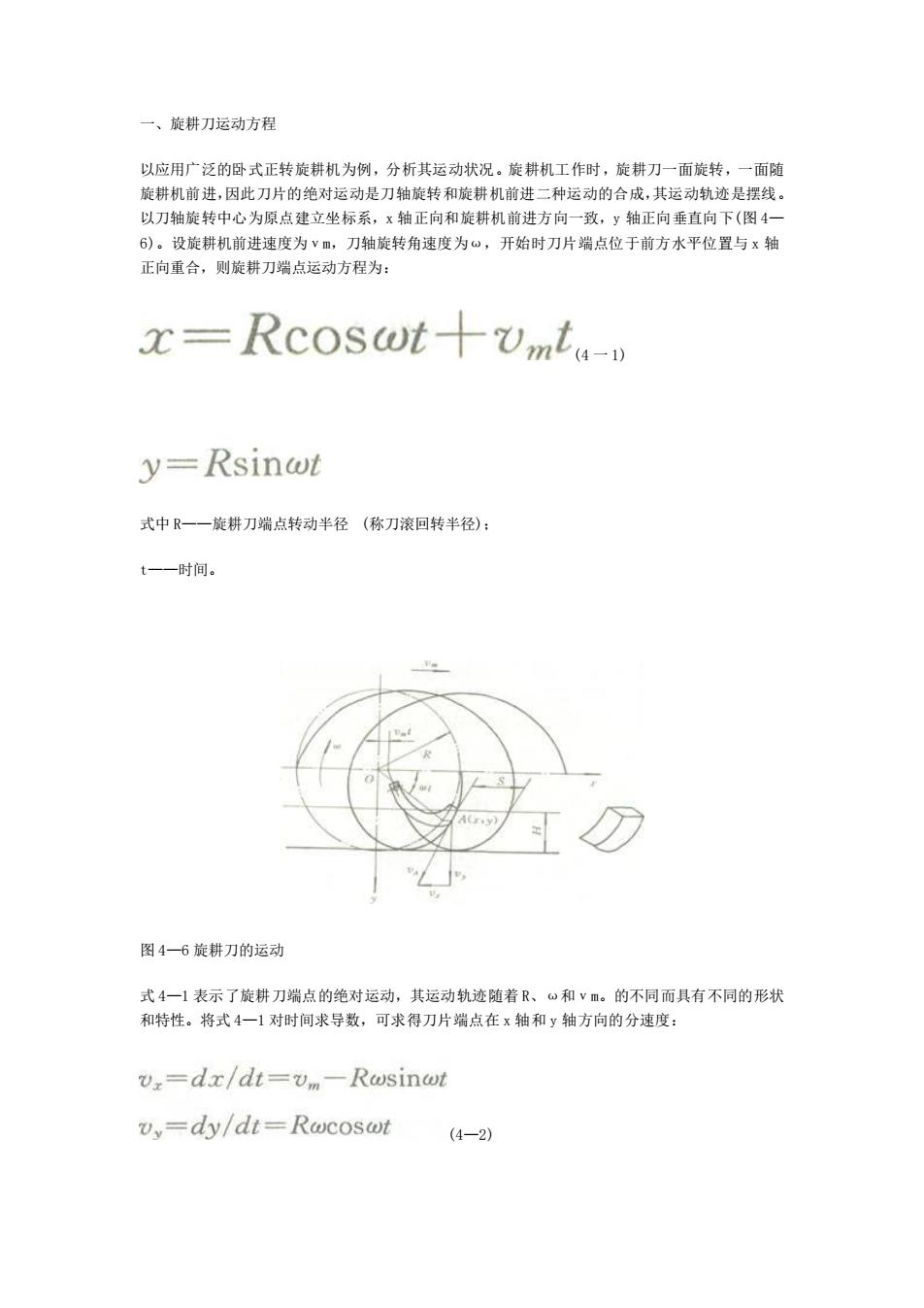
图 4—4 旋耕刀的安装 (a)直线型刀座(b)曲线型刀座(c)刀盘 刀辊的配置有立式和卧式两种(图 4—5),刀辊直立配置的旋耕机称为立式旋耕机,刀辊呈横向 水平配置的旋耕机称为卧式旋耕机。卧式旋耕机刀辊的旋转方向有正转和反转两种,正转时,刀 辊的旋转方向与拖拉机前进时轮子的旋转方向相同,反转时与其相反。刀辊正转的旋耕机称正转 旋耕机,刀辊反转的旋耕机称反转旋耕机。 挡土罩及平土拖板挡土罩弯成弧形安装在刀辊的上方,其作用是挡住旋耕刀切削土壤时抛起的土 块,将其进一步破碎,并保护驾驶员的安全。平土拖板的前端铰接在挡土罩上,后端用链条连接 到机架上,其离地高度可以调整。拖板的作用是增加碎土和平整地面的效果。 旋耕机工作时,一面在拖拉机的牵引下前进,同时拖拉机输出的动力经传动装置驱动刀辊旋转, 旋耕刀在前进和旋转过程中不断切削土壤,并将切下的土块向后抛掷与挡土罩相撞击,使土块进 一步碰碎后落到地面,并利用平土拖板将地面刮平达到碎土充分,地表平整。 图 4—5 刀辊配置方式 (a)立式(6)卧式 第二节旋耕机运动分析
图 4—4 旋耕刀的安装 (a)直线型刀座(b)曲线型刀座(c)刀盘 刀辊的配置有立式和卧式两种(图 4—5),刀辊直立配置的旋耕机称为立式旋耕机,刀辊呈横向 水平配置的旋耕机称为卧式旋耕机。卧式旋耕机刀辊的旋转方向有正转和反转两种,正转时,刀 辊的旋转方向与拖拉机前进时轮子的旋转方向相同,反转时与其相反。刀辊正转的旋耕机称正转 旋耕机,刀辊反转的旋耕机称反转旋耕机。 挡土罩及平土拖板挡土罩弯成弧形安装在刀辊的上方,其作用是挡住旋耕刀切削土壤时抛起的土 块,将其进一步破碎,并保护驾驶员的安全。平土拖板的前端铰接在挡土罩上,后端用链条连接 到机架上,其离地高度可以调整。拖板的作用是增加碎土和平整地面的效果。 旋耕机工作时,一面在拖拉机的牵引下前进,同时拖拉机输出的动力经传动装置驱动刀辊旋转, 旋耕刀在前进和旋转过程中不断切削土壤,并将切下的土块向后抛掷与挡土罩相撞击,使土块进 一步碰碎后落到地面,并利用平土拖板将地面刮平达到碎土充分,地表平整。 图 4—5 刀辊配置方式 (a)立式(6)卧式 第二节旋耕机运动分析
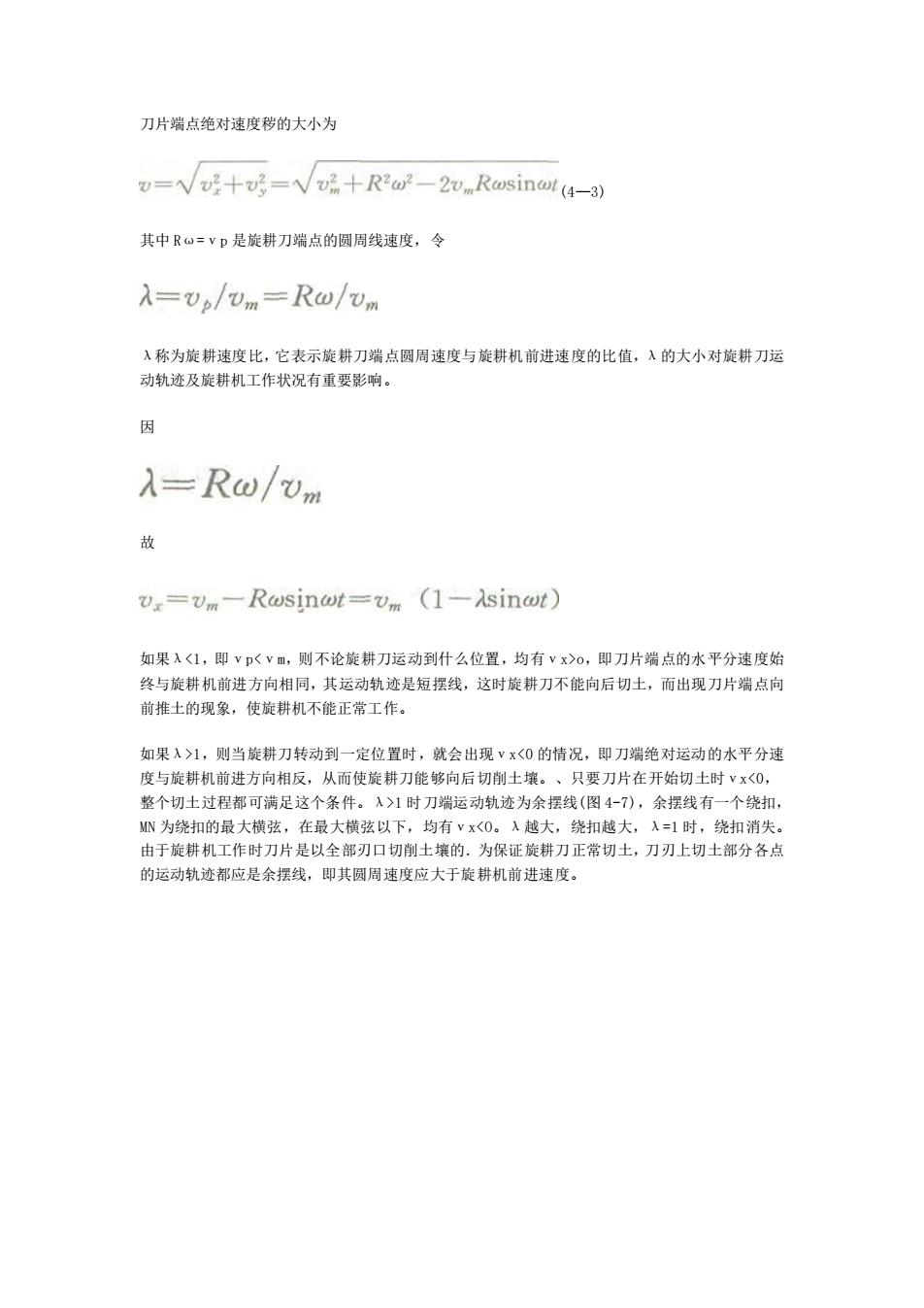
一、旋耕刀运动方程 以应用广泛的卧式正转旋耕机为例,分析其运动状况。旋耕机工作时,旋耕刀一面旋转,一面随 旋耕机前进,因此刀片的绝对运动是刀轴旋转和旋耕机前进二种运动的合成,其运动轨迹是摆线。 以刀轴旋转中心为原点建立坐标系,x 轴正向和旋耕机前进方向一致,y 轴正向垂直向下(图 4— 6)。设旋耕机前进速度为νm,刀轴旋转角速度为ω,开始时刀片端点位于前方水平位置与 x 轴 正向重合,则旋耕刀端点运动方程为: (4 一 1) 式中 R——旋耕刀端点转动半径 (称刀滚回转半径); t——时间。 图 4—6 旋耕刀的运动 式 4—1 表示了旋耕刀端点的绝对运动,其运动轨迹随着 R、ω和νm。的不同而具有不同的形状 和特性。将式 4—1 对时间求导数,可求得刀片端点在 x 轴和 y 轴方向的分速度: (4—2)
一、旋耕刀运动方程 以应用广泛的卧式正转旋耕机为例,分析其运动状况。旋耕机工作时,旋耕刀一面旋转,一面随 旋耕机前进,因此刀片的绝对运动是刀轴旋转和旋耕机前进二种运动的合成,其运动轨迹是摆线。 以刀轴旋转中心为原点建立坐标系,x 轴正向和旋耕机前进方向一致,y 轴正向垂直向下(图 4— 6)。设旋耕机前进速度为νm,刀轴旋转角速度为ω,开始时刀片端点位于前方水平位置与 x 轴 正向重合,则旋耕刀端点运动方程为: (4 一 1) 式中 R——旋耕刀端点转动半径 (称刀滚回转半径); t——时间。 图 4—6 旋耕刀的运动 式 4—1 表示了旋耕刀端点的绝对运动,其运动轨迹随着 R、ω和νm。的不同而具有不同的形状 和特性。将式 4—1 对时间求导数,可求得刀片端点在 x 轴和 y 轴方向的分速度: (4—2)
刀片端点绝对速度秽的大小为 (4—3) 其中 Rω=νp 是旋耕刀端点的圆周线速度,令 λ称为旋耕速度比,它表示旋耕刀端点圆周速度与旋耕机前进速度的比值,λ的大小对旋耕刀运 动轨迹及旋耕机工作状况有重要影响。 因 故 如果λ<1,即νp<νm,则不论旋耕刀运动到什么位置,均有νx>o,即刀片端点的水平分速度始 终与旋耕机前进方向相同,其运动轨迹是短摆线,这时旋耕刀不能向后切土,而出现刀片端点向 前推土的现象,使旋耕机不能正常工作。 如果λ>1,则当旋耕刀转动到一定位置时,就会出现νx<0 的情况,即刀端绝对运动的水平分速 度与旋耕机前进方向相反,从而使旋耕刀能够向后切削土壤。、只要刀片在开始切土时νx<0, 整个切土过程都可满足这个条件。λ>1 时刀端运动轨迹为余摆线(图 4-7),余摆线有一个绕扣, MN 为绕扣的最大横弦,在最大横弦以下,均有νx<O。λ越大,绕扣越大,λ=1 时,绕扣消失。 由于旋耕机工作时刀片是以全部刃口切削土壤的.为保证旋耕刀正常切土,刀刃上切土部分各点 的运动轨迹都应是余摆线,即其圆周速度应大于旋耕机前进速度
刀片端点绝对速度秽的大小为 (4—3) 其中 Rω=νp 是旋耕刀端点的圆周线速度,令 λ称为旋耕速度比,它表示旋耕刀端点圆周速度与旋耕机前进速度的比值,λ的大小对旋耕刀运 动轨迹及旋耕机工作状况有重要影响。 因 故 如果λ<1,即νp<νm,则不论旋耕刀运动到什么位置,均有νx>o,即刀片端点的水平分速度始 终与旋耕机前进方向相同,其运动轨迹是短摆线,这时旋耕刀不能向后切土,而出现刀片端点向 前推土的现象,使旋耕机不能正常工作。 如果λ>1,则当旋耕刀转动到一定位置时,就会出现νx<0 的情况,即刀端绝对运动的水平分速 度与旋耕机前进方向相反,从而使旋耕刀能够向后切削土壤。、只要刀片在开始切土时νx<0, 整个切土过程都可满足这个条件。λ>1 时刀端运动轨迹为余摆线(图 4-7),余摆线有一个绕扣, MN 为绕扣的最大横弦,在最大横弦以下,均有νx<O。λ越大,绕扣越大,λ=1 时,绕扣消失。 由于旋耕机工作时刀片是以全部刃口切削土壤的.为保证旋耕刀正常切土,刀刃上切土部分各点 的运动轨迹都应是余摆线,即其圆周速度应大于旋耕机前进速度