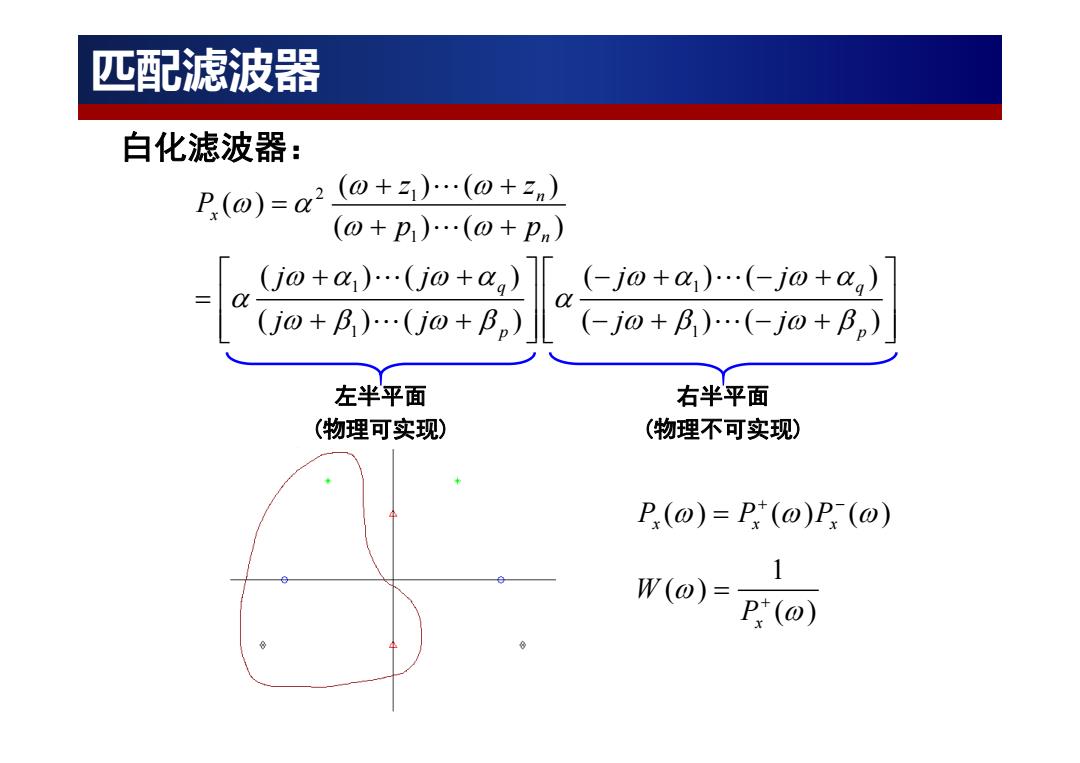
匹配滤波器 白化滤波器: P(o)=a2(0+)…(0+3n) (0+p)…(0+pn) (0+a…(j0+a,)][ (-j0+a)…(-j0+ag) (j0+阝)…(j0+Bn) (-j0+B)…(-j0+B。) 左半平面 右半平面 (物理可实现) (物理不可实现) P(@)=P(@)P.(@) W(o)=p*(o)
匹配滤波器 白化滤波器: 2 1 1 1 1 1 1 ( )( ) ( ) ( )( ) ( )( ) ( )( ) ( )( ) ( )( ) n x n q q p p z z P p p jj j j jj j j 左半平面 (物理可实现) 右半平面 (物理不可实现) () () () P PP x xx 1 ( ) ( ) x W P
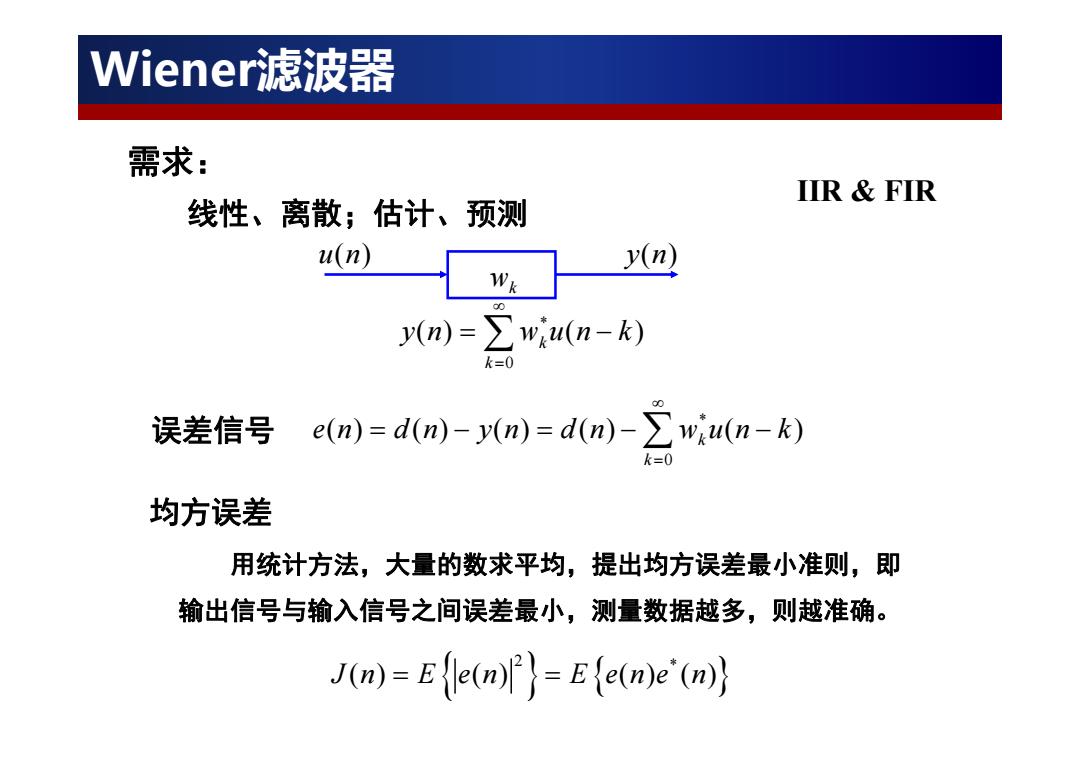
Viener滤波器 需求: IIR &FIR 线性、离散;估计、预测 u(n) w y(n) y(n)=∑wu(n-k) k=0 误差信号 e(n)=d(nm)-y(n)=d(n)-∑wu(n-k) k0 均方误差 用统计方法,大量的数求平均,提出均方误差最小准则,即 输出信号与输入信号之间误差最小,测量数据越多,则越准确。 J(n)=E e(n)Ee(n)e(n)
Wiener滤波器 需求: 线性、离散;估计、预测 * 0 () ( ) k k y n wu n k wk u n( ) y n( ) IIR & FIR 均方误差 用统计方法,大量的数求平均,提出均方误差最小准则,即 输出信号与输入信号之间误差最小,测量数据越多,则越准确。 2 * J n E en E ene n () () () () * 0 () () () () ( ) k k en d n y n d n wu n k 误差信号