第二章线性时不变系统的时域分析 2.1学习要求 通过本章的学习,学生应深刻理解0和0,的含义,掌握0值和0,值的方法:理解冲激 响应和阶跃响应的意义,掌握其求解方法:掌握微分方程和差分方程的经典解法,零输入 响应特别是零状态响应的求解:掌握卷积积分和卷积和的定义、性质和计算方法,并会用 卷积积分法求线性时不变系统的零状态响应。 2.2内容概述 2.1.1连续时间系统微分方程的求解 (一)微分方程的经典解 设系统激励为f(t),响应为y(t),则常系数n阶微分方程的一般形式为 d"y(t)d"-'y(t +a- dim-1 2+…+a dy(t) +aoy(t) dt" d (2-1) f0+b. -b.“d df@+.+60+6,f0 dim-T d 根据时域经典解法,式(2-1)的解可以分成齐次解和特解两部分,齐次解是式(2-1)右端 激励f(t)及其各阶导数都为零的齐次方程的解。齐次方程的形式为 d严0+a-d-0++a0+a0)=0 dt (2-2) dt 齐次解由形式为ce“的函数组成,将ce“代入式(2-2)得 a"+an-1a"-+…+a1a+a0=0 (2-3) 式(2-3)为微分方程式(2-1)的特征方程,它是一元n次代数方程,n个特征根为 C1,2…n。微分方程的齐次解常被称为系统的自由响应(或固有响应),它只与系统本身 的特性有关。特征根有以下形式: (1)特征根为单根 如果n个特征根互不相同(无重根),则微分方程齐次解的形式为 y=∑ce4 (2-4)
1 第二章 线性时不变系统的时域分析 2.1 学习要求 通过本章的学习,学生应深刻理解 0-和 0+的含义,掌握 0-值和 0+值的方法;理解冲激 响应和阶跃响应的意义,掌握其求解方法;掌握微分方程和差分方程的经典解法,零输入 响应特别是零状态响应的求解;掌握卷积积分和卷积和的定义、性质和计算方法,并会用 卷积积分法求线性时不变系统的零状态响应。 2.2 内容概述 2.1.1 连续时间系统微分方程的求解 (一)微分方程的经典解 设系统激励为 f (t),响应为 y(t) ,则常系数 n 阶微分方程的一般形式为 1 1 1 0 1 1 1 1 0 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) n n n n n m m m m m m d y t d y t dy t a a a y t dt dt dt d f t d f t df t b b b b f t dt dt dt (2-1) 根据时域经典解法,式(2-1)的解可以分成齐次解和特解两部分,齐次解是式(2-1)右端 激励 f (t)及其各阶导数都为零的齐次方程的解。齐次方程的形式为 1 1 1 0 1 ( ) ( ) ( ) ( ) 0 n n n n n d y t d y t dy t a a a y t dt dt dt (2-2) 齐次解由形式为 t ce 的函数组成,将 t ce 代入式(2-2)得 0 1 0 1 1 a a a n n n (2-3) 式(2-3)为微分方程式(2-1)的特征方程,它是一元 n 次代数方程,n 个特征根为 1 2 , n 。微分方程的齐次解常被称为系统的自由响应(或固有响应),它只与系统本身 的特性有关。特征根有以下形式: (1) 特征根为单根 如果 n 个特征根互不相同(无重根),则微分方程齐次解的形式为 n i t n i i y t c e 1 ( ) (2-4)
其中c,(i=L,2…,)为由初始条件决定的系数。 (2)特征根有重根 如果a,为特征方程的r重根,其余-P个根为单根,则微分方程的齐次解形式为 j=r+1 (2-5) 其中c,(i=1,2…,r)及c,(U=r+1,r+2…,n)为由初始条件决定的系数。 微分方程的特解y,()的函数形式由激励信号决定。表21给出了几种典型激励函数对 应的特解形式。根据激励函数,由表2-1选出特解形式,代入原微分方程,确定其待定系数, 从而求得特解y,()。特解是由外加激励决定的,因此也称为系统的强迫响应。 齐次解yn()与特解y,()之和是微分方程的全解y() y()=yn()+y(t) (2-6) 若特征根都为单根,则全解为 0=y.0+y,0=2ce4+y,0 i=l (2-7) 表2-1不同激励所对应的特解 激励f() 特解y,(t) Im An1"+An-lm-小+…+At+A0 Aear α不等于特征根 A1e+Ae“ a等于特征根 Ate“+An--e+…+A1e+Ae“ α等于r重特征根 cos(Bt)或sin(Bt) A,cos(Bt)+A,sin(Bt)所有的特征根均不等于±jB (二)0*与0初始条件的确定 由于激励信号的作用,响应y()及其各阶导数有可能在激励接入时发生跳变。激励接 入之前1=0时的一组状态称为起始状态,用y(0),(k=0,2…,n-1)表示,它包含了计 算响应所需要的全部历史信息。激励接入之后1=0时的状态称为初始状态y(0)。由于 2
2 其中 i c (i 1,2,n) 为由初始条件决定的系数。 (2) 特征根有重根 如果1为特征方程的r 重根,其余n r 个根为单根,则微分方程的齐次解形式为 1 1 1 ( ) j r n t r i t n i j i j r y t c t e c e (2-5) 其中 i c ( 1, 2 , ) i r 及 j c ( 1, 2 , ) j r r n 为由初始条件决定的系数。 微分方程的特解 y (t) p 的函数形式由激励信号决定。表 2-1 给出了几种典型激励函数对 应的特解形式。根据激励函数,由表 2-1 选出特解形式,代入原微分方程,确定其待定系数, 从而求得特解 y (t) p 。特解是由外加激励决定的,因此也称为系统的强迫响应。 齐次解 y (t) n 与特解 y (t) p 之和是微分方程的全解 y(t) y(t) y (t) y (t) n p (2-6) 若特征根都为单根,则全解为 ( ) ( ) ( ) ( ) 1 y t y t y t c e y t p n i t n p i i (2-7) 表 2-1 不同激励所对应的特解 激励 f (t) 特解 y (t) p m t 1 0 1 A t A 1 t A t A m m m m t e 1 0 1 1 1 0 t t t r t r t t t r r Ae Ate A e A t e A t e Ate A e r 不等于特征根 等于特征根 等于 重特征根 cos( t)或 sin( t) cos( ) sin( ) 1 2 A t A t 所有的特征根均不等于 j (二)0 +与 0 -初始条件的确定 由于激励信号的作用,响应 y(t) 及其各阶导数有可能在激励接入时发生跳变。激励接 入之前t 0 时的一组状态称为起始状态,用 ( ) (0 ),( 0, 2 , 1) k y k n 表示,它包含了计 算响应所需要的全部历史信息。激励接入之后t 0 时的状态称为初始状态 ( ) (0 ) k y 。由于
系统的解适用于0≤1<∞区间,故应利用y(0)作为初始条件,来求得全响应中的系数 ℃,。可见用时域经典解法求解系统响应时,待定系数应根据系统0时刻状态y(0)和激 励信号求出0*时刻状态yk(0*)。 从微分方程上直观地看,若方程的右边不含有冲激信号项,则响应在0到0时刻的状 态没有跳变,即y(O)=y(O*)。否则,可以按微分方程两边奇异函数系数相平衡方法 来分析跳变情况。 (三)零输入响应与零状态响应 线性时不变系统的全响应除了可以分解为齐次解和特解外,还可以分解为零输入响应 与零状态响应。 零输入响应是指没有外加激励信号的作用,仅由系统的初始储能引起的响应,用y() 表示:零状态响应是指系统的起始状态为零(初始储能为零)时,仅由外加激励信号f(t)引 起的响应,用y()表示。这样就可以把由激励和初始储能决定的响应区分开来。系统的全 响应可以表示为零输入和零状态响应之和 y(t)=y(t)+v-(t) (2-8) 根据定义,零输入响应是系统微分方程对应齐次方程的解,其形式与齐次解相同,可 表示为 y,0=ce叫 (2-9) 其中α,为单根,C为由初始储能决定的待定系数。 零状态响应是零起始条件下非齐次方程的全解,也就是起始状态为零时微分方程的全 解,其形式为 y(0=】 (2-10) 其中α,为单根,C为待定系数,它的确定方法与式(2-7)的方法相同,只是系统的起 始状态为零。 2.2.2离散时间系统差分方程的求解 N阶常系数线性差分方程的一般形式为 立0a-0-之1m-0 (2-11)
3 系统的解适用于0 t 区间,故应利用 ( ) (0 ) k y 作为初始条件,来求得全响应中的系数 i c 。可见用时域经典解法求解系统响应时,待定系数应根据系统0 时刻状态 ( ) (0 ) k y 和激 励信号求出0 时刻状态 ( ) (0 ) k y 。 从微分方程上直观地看,若方程的右边不含有冲激信号项,则响应在0 到0 时刻的状 态没有跳变,即 ( ) (0 ) k y = ( ) (0 ) k y 。否则,可以按微分方程两边奇异函数系数相平衡方法 来分析跳变情况。 (三)零输入响应与零状态响应 线性时不变系统的全响应除了可以分解为齐次解和特解外,还可以分解为零输入响应 与零状态响应。 零输入响应是指没有外加激励信号的作用,仅由系统的初始储能引起的响应,用 y (t) zi 表示;零状态响应是指系统的起始状态为零(初始储能为零)时,仅由外加激励信号 f (t) 引 起的响应,用 y (t) zs 表示。这样就可以把由激励和初始储能决定的响应区分开来。系统的全 响应可以表示为零输入和零状态响应之和 y(t) y (t) y (t) zi zs (2-8) 根据定义,零输入响应是系统微分方程对应齐次方程的解,其形式与齐次解相同,可 表示为 n i t zi zii i y t c e 1 ( ) (2-9) 其中i 为单根, zii c 为由初始储能决定的待定系数。 零状态响应是零起始条件下非齐次方程的全解,也就是起始状态为零时微分方程的全 解,其形式为 ( ) ( ) 1 y t c e y t p n i t zs zsi i (2-10) 其中i 为单根, zsi c 为待定系数,它的确定方法与式(2-7)的方法相同,只是系统的起 始状态为零。 2.2.2 离散时间系统差分方程的求解 N 阶常系数线性差分方程的一般形式为 0 0 ( ) ( ) N M i l i l a y n i b f n l (2-11)
式中a,b是常数,激励f(n)的移位阶次为M,响应y(n)的移位阶次表示差分方程的 阶次N。 常系数差分方程时域求解的方法一般有迭代法、经典解法及零输入零状态方法。用卷 积求零状态响应在随后的章节介绍。 (一)迭代法 该方法可以利用手算或计算机递推计算,概念清楚,方法简单,但是由于只能得到离 散的数值解,对于复杂系统难以得到解析表达式。该方法常用来迭代初始条件。 (二)差分方程的经典解 对式(2-11)所示的N阶常系数线性差分方程,其全解可分成齐次解和特解两部分,齐次 解用yn(n)表示,特解用y(n)表示,则全解为 y(n)=y(n)+y,(n) (2-12) 先求齐次解,式(2-12)中右边各项为零时,对应齐次方程为 4m-0=0 (2-13) i=0 考虑一阶差分方程的齐次方程为 y(n)-ay(n-1)=0 (2-14) 上式改写为 a=(n) y(n-1) (2-15) y(n)与y(n-1)之比等于a,说明序列y(nm)是一个公比为a的等比数列,因此有如下 形式 y(n)=Ca" (2-16) 式中C为常数,由初始条件决定。 对于高阶的差分方程,其齐次解以形式为Caα”的项线性组合而成,将y()=Ca”代入 式(2-13)得 a,Ca"-=0 (2-17) i=0 消去常数C,并逐项除以α-N,式(2-17)化简为 aoaN+aax-+aa2+.+ax-a+ay=0 (2-18)
4 式中a,b 是常数,激励 f (n) 的移位阶次为 M,响应 y(n)的移位阶次表示差分方程的 阶次 N。 常系数差分方程时域求解的方法一般有迭代法、经典解法及零输入零状态方法。用卷 积求零状态响应在随后的章节介绍。 (一) 迭代法 该方法可以利用手算或计算机递推计算,概念清楚,方法简单,但是由于只能得到离 散的数值解,对于复杂系统难以得到解析表达式。该方法常用来迭代初始条件。 (二)差分方程的经典解 对式(2-11)所示的 N 阶常系数线性差分方程,其全解可分成齐次解和特解两部分,齐次 解用 y (n) n 表示,特解用 y (n) p 表示,则全解为 y(n) y (n) y (n) n p (2-12) 先求齐次解,式(2-12)中右边各项为零时,对应齐次方程为 0 ( ) 0 N i i a y n i (2-13) 考虑一阶差分方程的齐次方程为 y(n) ay(n 1) 0 (2-14) 上式改写为 ( 1) ( ) y n y n a (2-15) y(n) 与 y(n 1) 之比等于a ,说明序列 y(n) 是一个公比为a 的等比数列,因此有如下 形式 n y(n) Ca (2-16) 式中 C 为常数,由初始条件决定。 对于高阶的差分方程,其齐次解以形式为 n C 的项线性组合而成,将 n y(n) C 代入 式(2-13)得 0 0 N n i i i a C (2-17) 消去常数 C,并逐项除以 n N ,式(2-17)化简为 0 1 2 2 1 0 1 N N N N N a a a a a (2-18)
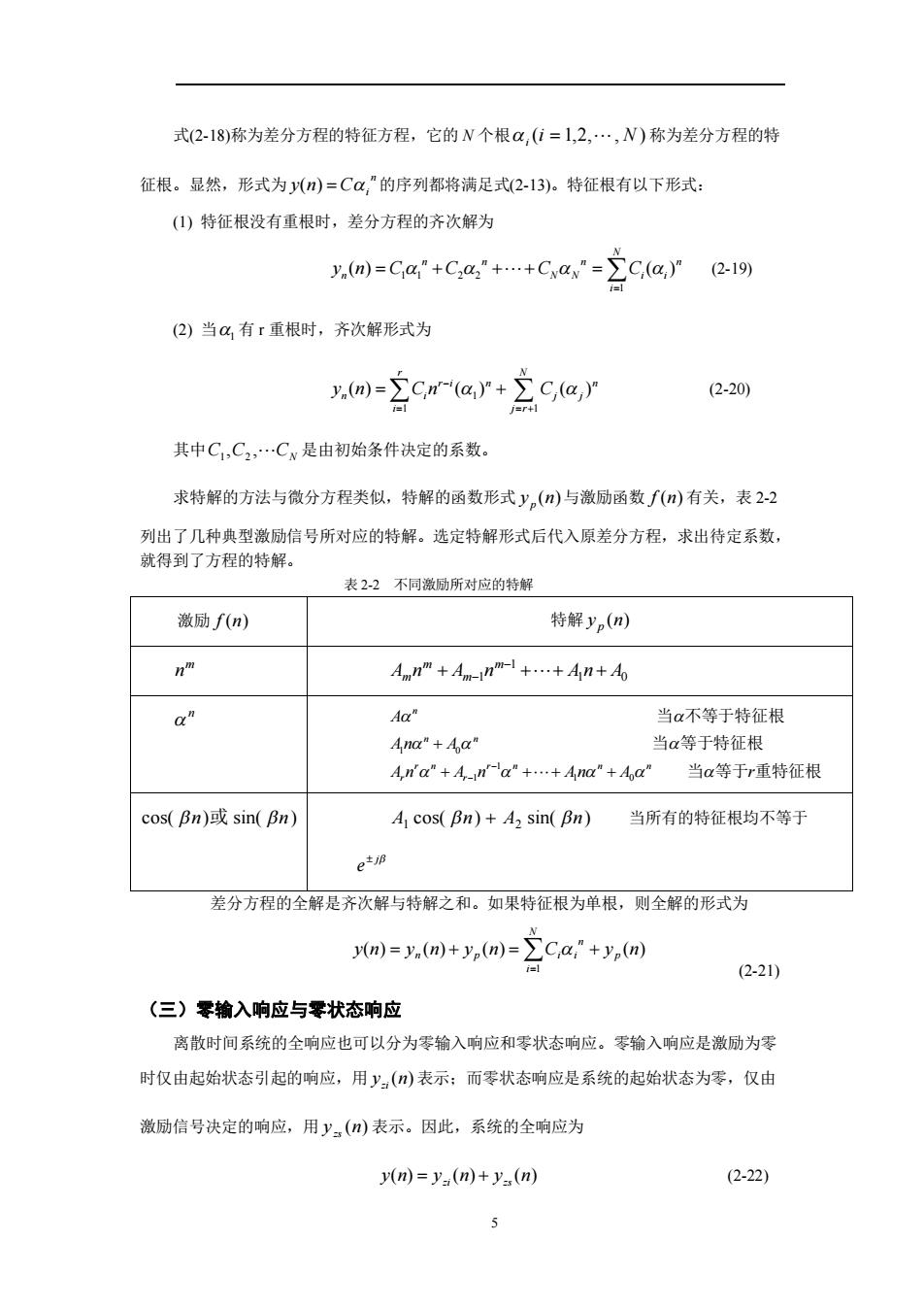
式(2-18)称为差分方程的特征方程,它的N个根,(i=1,2,…,N)称为差分方程的特 征根。显然,形式为y()=Ca,”的序列都将满足式(2-13)。特征根有以下形式: (1)特征根没有重根时,差分方程的齐次解为 y(m)=Ca"+C242"+…+Cvav"=∑C,(a,)” (2-19) (2)当%有r重根时,齐次解形式为 .m-2cra,)+c,a,) (2-20) 其中C1,C2,Cw是由初始条件决定的系数。 求特解的方法与微分方程类似,特解的函数形式y,()与激励函数f(n)有关,表2-2 列出了几种典型激励信号所对应的特解。选定特解形式后代入原差分方程,求出待定系数, 就得到了方程的特解。 表2-2不同激励所对应的特解 激励f(n) 特解yp(n) nm Annm+An-1nm+…+An+A0 Q为 Aa" 当α不等于特征根 Ana"+Aa" 当aα等于特征根 Ana+A,-n-a”+…+Ana"+Aa” 当aα等于r重特征根 cos(Bn)或sin(Bn) A cos(Bn)+A2 sin(Bn) 当所有的特征根均不等于 et 差分方程的全解是齐次解与特解之和。如果特征根为单根,则全解的形式为 y(n)=y,(n)+yp(n)=>Ca,"+y,(n) (2-21) (三)零输入响应与零状态响应 离散时间系统的全响应也可以分为零输入响应和零状态响应。零输入响应是激励为零 时仅由起始状态引起的响应,用y()表示:而零状态响应是系统的起始状态为零,仅由 激励信号决定的响应,用y()表示。因此,系统的全响应为 y(n)=y-(n)+y(n) (2-22) 5
5 式(2-18)称为差分方程的特征方程,它的 N 个根 (i 1,2, , N ) i 称为差分方程的特 征根。显然,形式为 n C i y(n) 的序列都将满足式(2-13)。特征根有以下形式: (1) 特征根没有重根时,差分方程的齐次解为 1 1 2 2 1 ( ) ( ) N n n n n n N N i i i y n C C C C (2-19) (2) 当1 有 r 重根时,齐次解形式为 1 1 1 ( ) ( ) ( ) r N r i n n n i j j i j r y n C n C (2-20) 其中C C CN , , 1 2 是由初始条件决定的系数。 求特解的方法与微分方程类似,特解的函数形式 y (n) p 与激励函数 f (n) 有关,表 2-2 列出了几种典型激励信号所对应的特解。选定特解形式后代入原差分方程,求出待定系数, 就得到了方程的特解。 表 2-2 不同激励所对应的特解 激励 f (n) 特解 y (n) p m n 1 0 1 A n A 1 n A n A m m m m n 1 0 1 1 1 0 n n n r n r n n n r r A A n A A n A n A n A r 当 不等于特征根 当 等于特征根 当 等于 重特征根 cos( n)或 sin( n) cos( ) sin( ) 1 2 A n A n 当所有的特征根均不等于 j e 差分方程的全解是齐次解与特解之和。如果特征根为单根,则全解的形式为 ( ) ( ) ( ) ( ) 1 y n y n y n C y p n N i n n p i i (2-21) (三)零输入响应与零状态响应 离散时间系统的全响应也可以分为零输入响应和零状态响应。零输入响应是激励为零 时仅由起始状态引起的响应,用 y (n) zi 表示;而零状态响应是系统的起始状态为零,仅由 激励信号决定的响应,用 y (n) zs 表示。因此,系统的全响应为 y(n) y (n) y (n) zi zs (2-22)