过程拉制原狸与爱用栽术月 中周她质大学(武汉)安剑奇 执行器 3.1执行器的工作原理与分类 3.2电动执行机构 3.3气动执行机构 3.4液动执行机构 3.5调节机构 3.6执行器的选择 3.7其他执行设备 3.8本章小结 12
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 3.1 执行器的工作原理与分类 3.2 电动执行机构 3.3 气动执行机构 3.4 液动执行机构 3.5 调节机构 3.6 执行器的选择 3.7 其他执行设备 3.8 本章小结 执行器 12
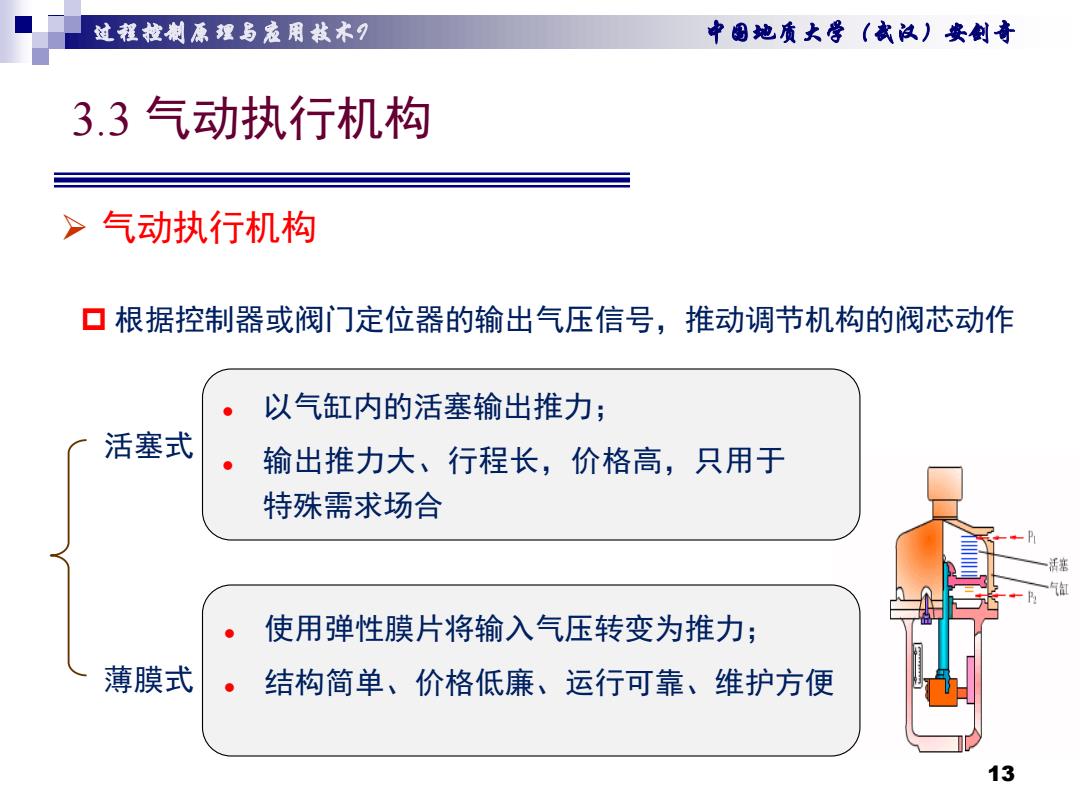
过程拉制原狸与爱用栽术月 中图她质大学(武汉)安剑奇 3.3气动执行机构 >气动执行机构 ▣根据控制器或阀门定位器的输出气压信号,推动调节机构的阀芯动作 以气缸内的活塞输出推力; 活塞式 输出推力大、行程长,价格高,只用于 特殊需求场合 使用弹性膜片将输入气压转变为推力; 薄膜式 。 结构简单、价格低廉、运行可靠、维护方便 13
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 3.3 气动执行机构 气动执行机构 13 根据控制器或阀门定位器的输出气压信号,推动调节机构的阀芯动作 活塞式 薄膜式 使用弹性膜片将输入气压转变为推力; 结构简单、价格低廉、运行可靠、维护方便 以气缸内的活塞输出推力; 输出推力大、行程长,价格高,只用于 特殊需求场合
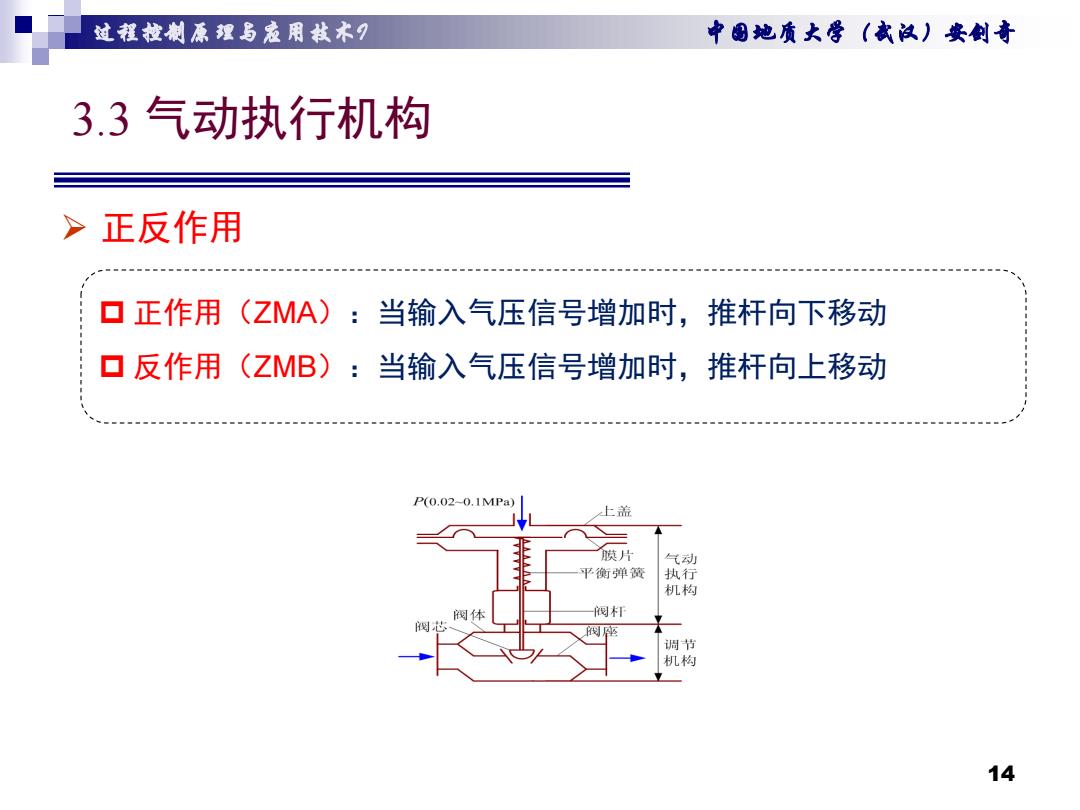
过程拉制原狸与爱用栽术? 中图她质大学(武议)安创奇 3.3气动执行机构 > 正反作用 ▣ 正作用 (ZMA):当输入气压信号增加时,推杆向下移动 ▣反作用(ZMB):当输入气压信号增加时,推杆向上移动 P(0.02-0.1MPa) 上盖 膜片 气动 平衡弹簧 执行 机构 阀体 阀杆 调节 机构 14
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 3.3 气动执行机构 正反作用 14 正作用(ZMA):当输入气压信号增加时,推杆向下移动 反作用(ZMB):当输入气压信号增加时,推杆向上移动
过程拉制原狸与爱用栽术月 中周她质大学(武汉)安剑奇 执行器 3.1执行器的工作原理与分类 3.2电动执行机构 3.3气动执行机构 3.4液动执行机构 3.5调节机构 3.6执行器的选择 3.7其他执行设备 3.8本章小结 15
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 3.1 执行器的工作原理与分类 3.2 电动执行机构 3.3 气动执行机构 3.4 液动执行机构 3.5 调节机构 3.6 执行器的选择 3.7 其他执行设备 3.8 本章小结 执行器 15
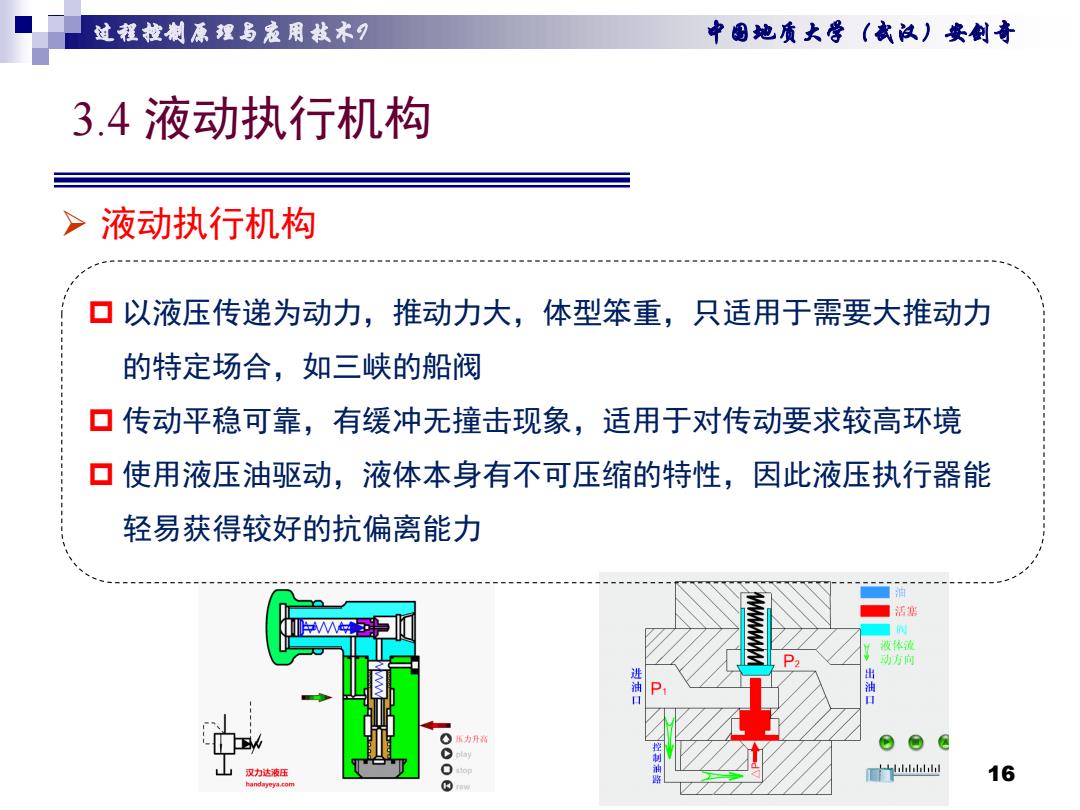
过程拉制原狸与爱用栽术月 中图她质大学(武议)安剑创奇 3.4液动执行机构 >液动执行机构 口以液压传递为动力,推动力大,体型笨重,只适用于需要大推动力 的特定场合,如三峡的船阀 口传动平稳可靠,有缓冲无撞击现象,适用于对传动要求较高环境 ▣使用液压油驱动,液体本身有不可压缩的特性,因此液压执行器能 轻易获得较好的抗偏离能力 活男 体 动方向 油 压力升高 汉力达液压 op 控制油路 llll 16 handayeya.com
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 3.4 液动执行机构 液动执行机构 16 以液压传递为动力,推动力大,体型笨重,只适用于需要大推动力 的特定场合,如三峡的船阀 传动平稳可靠,有缓冲无撞击现象,适用于对传动要求较高环境 使用液压油驱动,液体本身有不可压缩的特性,因此液压执行器能 轻易获得较好的抗偏离能力