过程拉制原狸与爱用栽术月 中周她质大学(武汉)安剑奇 执行器 3.1执行器的工作原理与分类 3.2电动执行机构 3.3气动执行机构 3.4液动执行机构 3.5调节机构 3.6执行器的选择 3.7其他执行设备 3.8本章小结 7
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 3.1 执行器的工作原理与分类 3.2 电动执行机构 3.3 气动执行机构 3.4 液动执行机构 3.5 调节机构 3.6 执行器的选择 3.7 其他执行设备 3.8 本章小结 执行器 7

过程拉制原狸与爱用栽术 中图她质大常(武议)安剑奇 3.2电动执行机构 >接收控制器DC0~10mA或DC4~20mA电流信号,转换为角位移(输 出力矩)或直线位移(输出力),操纵阀门、档板等调节机构 角行程 ▣电动机将直流电信号转为角位移( 0~90℃),操纵蝶 阀、档板之类的旋转式调节阀 直行程 电动机和减速器将直流电信号,转为直线位移输出, 适用于操纵单座、双座、三通等直线式调节阀 多转式 ,口开启和关闭闸阀、截止阀等多转式阀门
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 3.2 电动执行机构 接收控制器DC 0~10mA或DC 4~20mA 电流信号,转换为角位移(输 出力矩)或直线位移(输出力),操纵阀门、档板等调节机构 角行程 直行程 多转式 电动机将直流电信号转为角位移(0~90℃),操纵蝶 阀、档板之类的旋转式调节阀 电动机和减速器将直流电信号,转为直线位移输出, 适用于操纵单座、双座、三通等直线式调节阀 开启和关闭闸阀、截止阀等多转式阀门

过程拉制原狸与爱用栽术月 中图她质大学(武议)安剑奇 3.2电动执行机构 > 工作原理 口组成:执行机构,伺服放大器 口▣可实现自动调节,还可实现自动和手动调节的相互切换 ▣操作器的置于手动操作时,由正、反操作按钮直接控制电机的电源, 以实现执行机构输出轴的正转或反转 输入信号/厂 伺服放大器 操作器 伺服电机 减速器 位置反馈信号 位置发送器 放大器 执行机构 一一一小 9
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 3.2 电动执行机构 工作原理 9 组成:执行机构,伺服放大器 可实现自动调节,还可实现自动和手动调节的相互切换 操作器的置于手动操作时,由正、反操作按钮直接控制电机的电源, 以实现执行机构输出轴的正转或反转
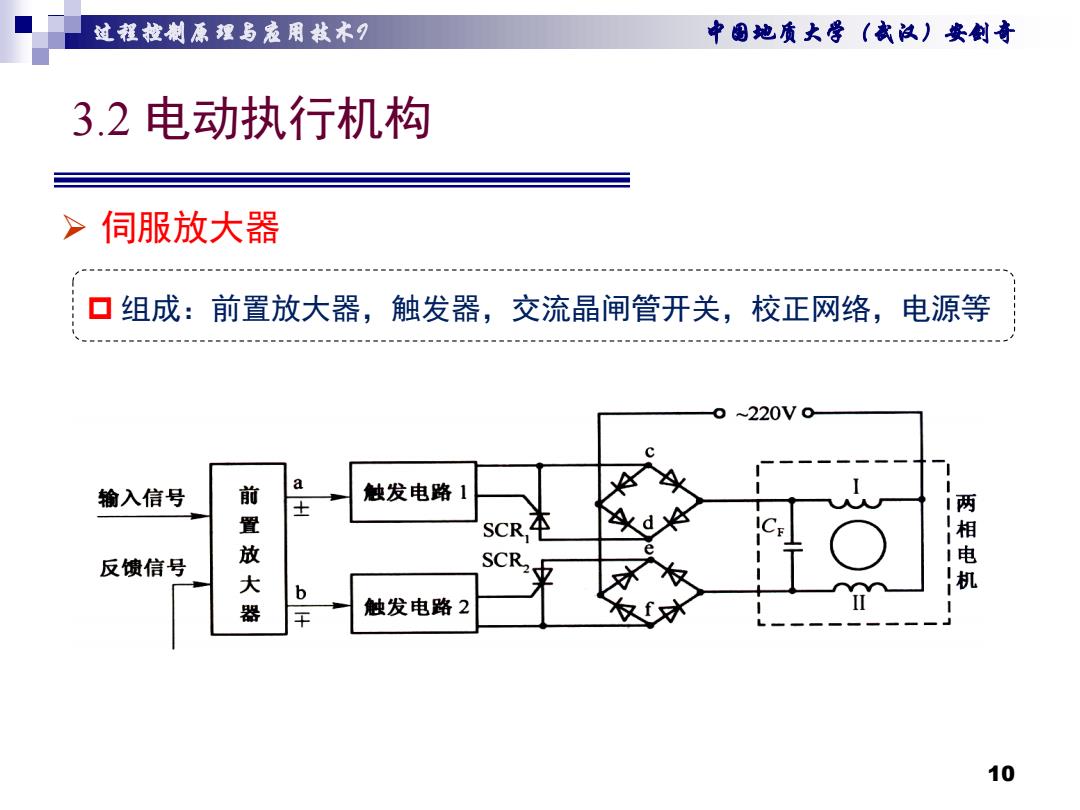
过程拉制原狸与爱用栽术 中围她质大学(武汉)安创剑奇 3.2电动执行机构 伺服放大器 口组成:前置放大器, 触发器,交流晶闸管开关,校正网络,电源等 ≈220V。 a 输入信号 前 触发电路1 1 置放 SCR, 反馈信号 大 SCR,五 相电机 触发电路2 10
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 3.2 电动执行机构 伺服放大器 10 组成:前置放大器,触发器,交流晶闸管开关,校正网络,电源等
过程拉制原狸与爱用栽术 中图她质大学(武议)安剑奇 3.2电动执行机构 >执行机构 接受伺服放大器或操作器的输出信号,控制伺服电动机的正反转,经 过减速器减速后,转换成输出力矩去推动调节机构动作 伺服电动机:将伺服放大器输出的电功率转换成机械转矩 减速器:把伺服电机高转速,小力矩的输出功率转换成执行机构输 出轴的低转速,大力矩的输出功率 ■位置发送器:将执行机构输出轴的位移线性地转换成DC0~10mA或 DC4~20mA反馈信号,反馈到伺服放大器的输入端 11
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 3.2 电动执行机构 执行机构 11 接受伺服放大器或操作器的输出信号,控制伺服电动机的正反转,经 过减速器减速后,转换成输出力矩去推动调节机构动作 伺服电动机:将伺服放大器输出的电功率转换成机械转矩 减速器:把伺服电机高转速,小力矩的输出功率转换成执行机构输 出轴的低转速,大力矩的输出功率 位置发送器:将执行机构输出轴的位移线性地转换成DC 0~10mA或 DC 4~20mA反馈信号,反馈到伺服放大器的输入端