3、系统估计方法 ·系统估计方法主要包括: -三阶段最小二乘法(3SLS,Three Stage Least Squares) -完全信息最大或然法(FIML,Full Information Maximum Likelihood) ·本节只介绍几种简单的、常用的单方程估计方 法。 ·在大量的联立方程模型的应用研究中,仍然广 泛应用普遍最小二乘法进行模型的估计
3、系统估计方法 • 系统估计方法主要包括: – 三阶段最小二乘法(3SLS, Three Stage Least Squares) – 完全信息最大或然法(FIML, Full Information Maximum Likelihood) • 本节只介绍几种简单的、常用的单方程估计方 法。 • 在大量的联立方程模型的应用研究中,仍然广 泛应用普遍最小二乘法进行模型的估计
二、狭义的工具变量法 IV,Instrumental Variables
二、狭义的工具变量法 (IV,Instrumental Variables)
1.方法思路 ·“狭义的工具变量法”与“广义的工具变量法” 。1 解决结构方程中与随机误差项相关的内生解释 变量问题。 ·方法原理与单方程模型的IV方法相同。 模型系统中提供了可供选择的工具变量,使得 IV方法的应用成为可能
⒈方法思路 • “狭义的工具变量法” 与“广义的工具变量法” • 解决结构方程中与随机误差项相关的内生解释 变量问题。 • 方法原理与单方程模型的IV方法相同。 • 模型系统中提供了可供选择的工具变量,使得 IV方法的应用成为可能
2.工具变量的选取 。 对于联立方程模型的每一个结构方程,例如第1个 方程,可以写成如下形式: Y=B22+83Y3++g rg+ruX+712X2++Yu X+N ·内生解释变量(g1-1)个,先决解释变量k个。 ·如果方程是恰好识别的,有(g1)=(k-k1)。 ·可以选择(k-k1)个方程没有包含的先决变量作 为(g1-1)个内生解释变量的工具变量
⒉工具变量的选取 • 对于联立方程模型的每一个结构方程,例如第1个 方程,可以写成如下形式: Y1 12Y2 13Y3 1g Yg 11X1 12 X2 1k Xk 1 1 1 1 1 = + ++ + + ++ + • 内生解释变量(g1 -1)个,先决解释变量k1个。 • 如果方程是恰好识别的,有(g1 -1)=(k- k1)。 • 可以选择(k- k1)个方程没有包含的先决变量作 为(g1 -1)个内生解释变量的工具变量
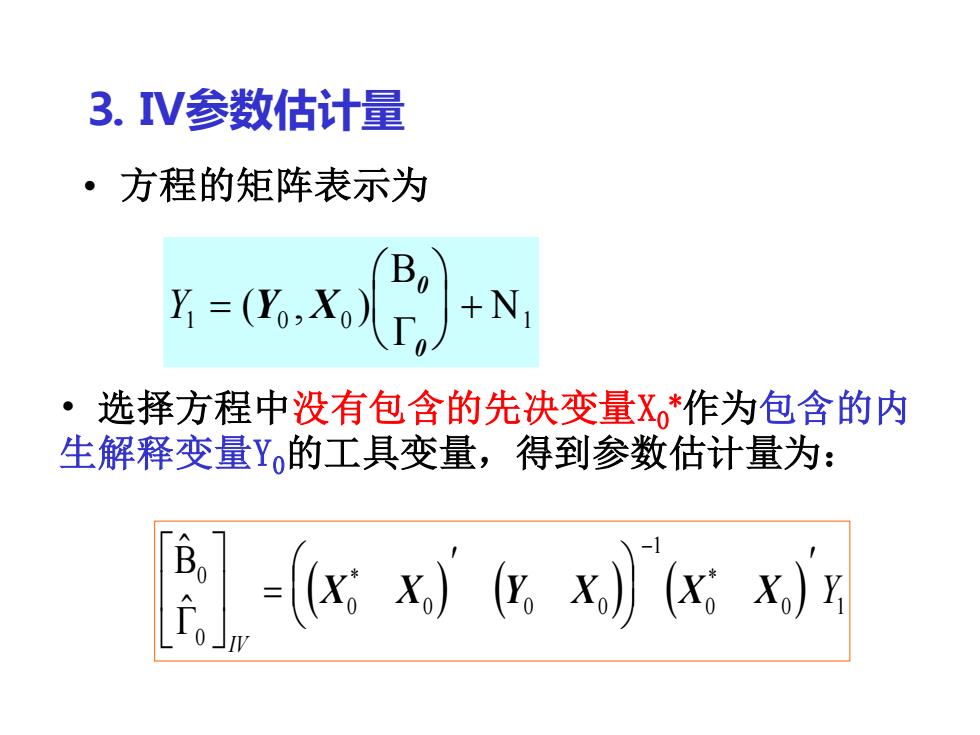
3.V参数估计量 。方程的矩阵表示为 Y=(,X八r +Ni ·选择方程中没有包含的先决变量X*作为包含的内 生解释变量Y的工具变量,得到参数估计量为: -x对好
⒊ IV参数估计量 • 方程的矩阵表示为 Y1 = 0 0 1 (Y , X ) + 0 0 ( ) ( ) ( ) * * 0 0 0 0 0 0 1 0 0 1 = − IV X X Y X X X Y • 选择方程中没有包含的先决变量X0 *作为包含的内 生解释变量Y0的工具变量,得到参数估计量为: