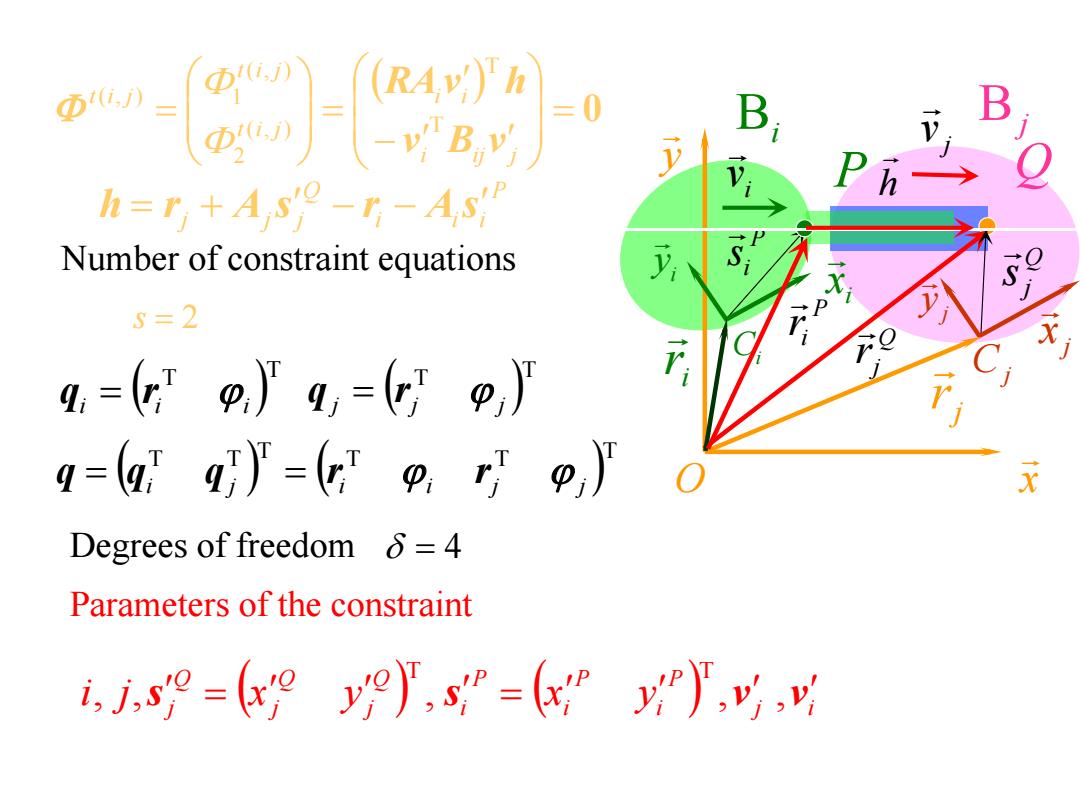
D() (RA)》h -v"Bv h=r+As'-r-As Number of constraint equations 5=2 g=(9,于4,=g,)月 a=aa=o.r o x Degrees of freedom 5=4 Parameters of the constraint i,,s=(69,s=k”,y,y
j i P i P i P i Q j Q j Q j i, j,s x y , s x y ,v ,v T T s 2 Degrees of freedom 4 Number of constraint equations T T i i i q r Parameters of the constraint T T j j j q r T T T T T T i j i i j j q q q r r Bj y x O j x y j Cj j r Q Q j r Q j s P i s i x i y Ci Bi ir P P ir h i v j v 0 i ij j i i t i j t i j t i j v B v RAv h T T ( , ) 2 ( , ) ( , ) 1 P i i i Q j j j h r A s r A s
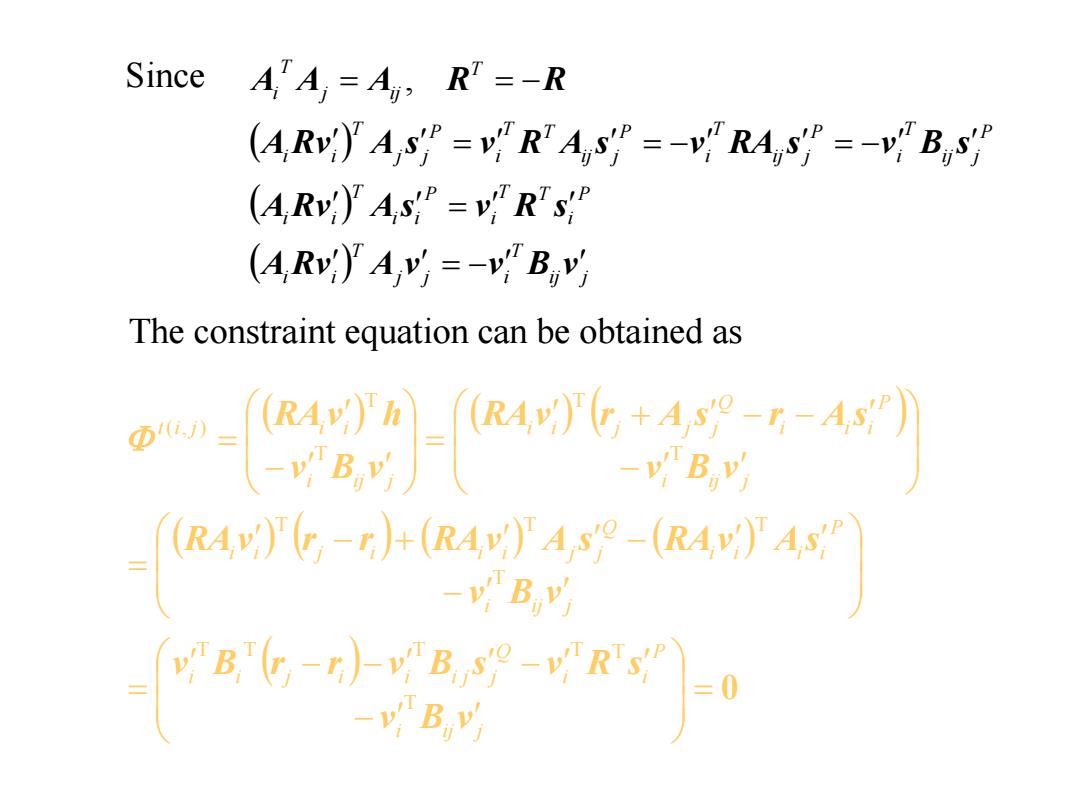
Since AA=A RT=-R (A,Rv)A s=vR'Ays'=-v RAus"=-v Bus, (A,RAs”=Rs (A,R)Ay=-B, The constraint equation can be obtained as - 4)-小(R4)A-(R4)As” -vBv h n tev
ij j T j j i T i i P i T T i P i i T i i P ij j T i P ij j T i P ij j T T i P j j T i i T j ij T i A Rv A v v B v A Rv A s v R s A Rv A s v R A s v RA s v B s A A A R R Since , The constraint equation can be obtained as 0 i ij j P i i Q i i j i i i j j i ij j P i i i i Q i i j i i i j j i ij j P i i i Q i i j j j i ij j t i j i i v B v v B r r v B s v R s v B v RAv r r RAv A s RAv A s v B v RAv r A s r A s v B v RAv h T T T T T T T T T T T T T T ( , )
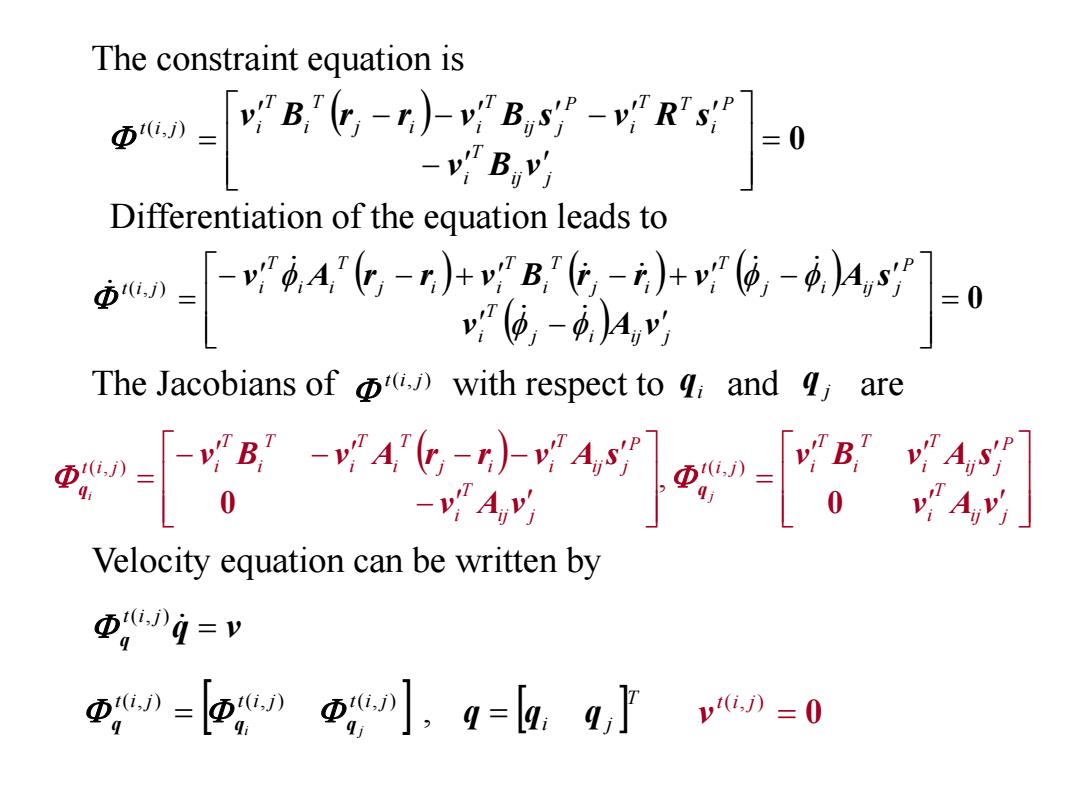
The constraint equation is Differentiation of the equation leads to --语66-] @,-)Ay The Jacobians of with respect to 4,and 4 are -vAv Velocity equation can be written by =v p小=》],q=ag p(i.i)=0
0 ij j T i P i T T i P ij j T j i i T i T t i j i v B v v B r r v B s v R s ( , ) 0 j i ij j T i P j i ij j T j i i T i T j i i T i i T t i j i v A v v A r r v B r r v A s ( , ) ij j T i P ij j T i T i T t i j i ij j T i P ij j T j i i T i T i T i T t i j i i j v A v v B v A s v A v v B v A r r v A s q q 0 0 ( , ) ( , ) , 0 t(i, j) v T i j t i j t i j t i j i j q q q , q q q ( , ) ( , ) ( , ) The constraint equation is Differentiation of the equation leads to The Jacobians of with respect to and are t(i, j) i q j q Velocity equation can be written by q v q t(i, j)
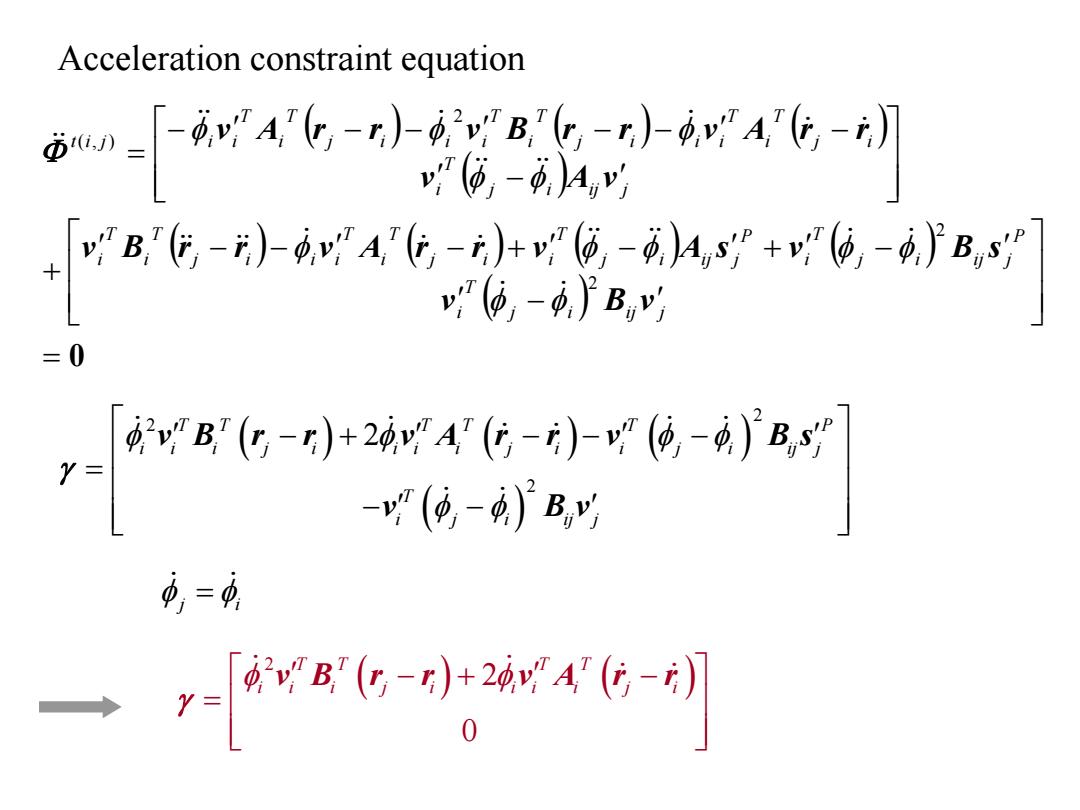
Acceleration constraint equation r4小小4t- v(8,-0.)Av; B吃小4近小6以矿+6扩a -项B, yB(-)+2g4(传-)-(向-Bs -(色-)B,y 功= 6小灯6-]
Acceleration constraint equation 0 j i ij j T i P j i ij j T i P j i ij j T j i i T i T j i i i T i T i j i ij j T i j i T i T j i i i T i T j i i i T i T t i j i i v B v v B r r v A r r v A s v B s v A v v A r r v B r r v A r r 2 2 2 ( , ) 2 2 2 2 T T T T T P i i i j i i i i j i i j i ij j T i j i ij j v B r r v A r r v B s v B v j i 2 2 0 T T T T i i i j i i i i j i v B r r v A r r
Relative distance constraint ·Definition: The distance between two points of different bodies is constant
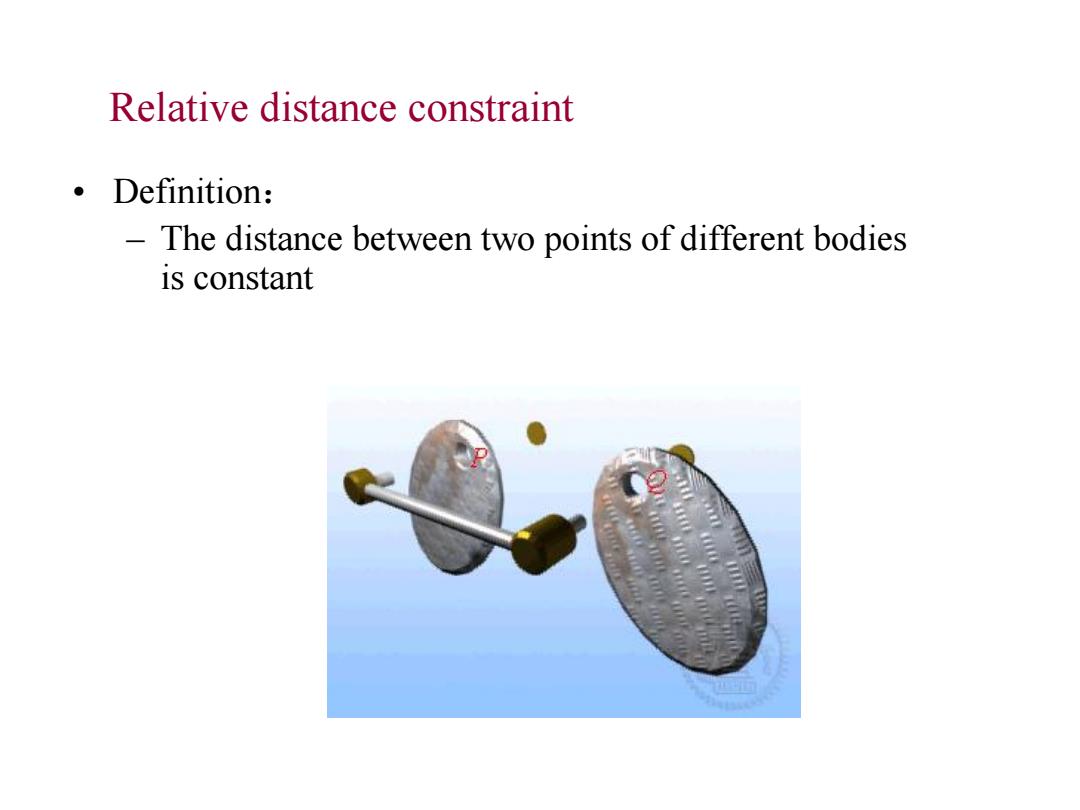
2022年3月11日 15 Relative distance constraint • Definition: – The distance between two points of different bodies is constant