
3.2.Constraints between a body and ground (Absolute constraints) Absolute x constraint Absolute y constraint Absolute angle constraint Absolute distance constraint
• Absolute x constraint • Absolute y constraint • Absolute angle constraint • Absolute distance constraint 3.2. Constraints between a body and ground (Absolute constraints)
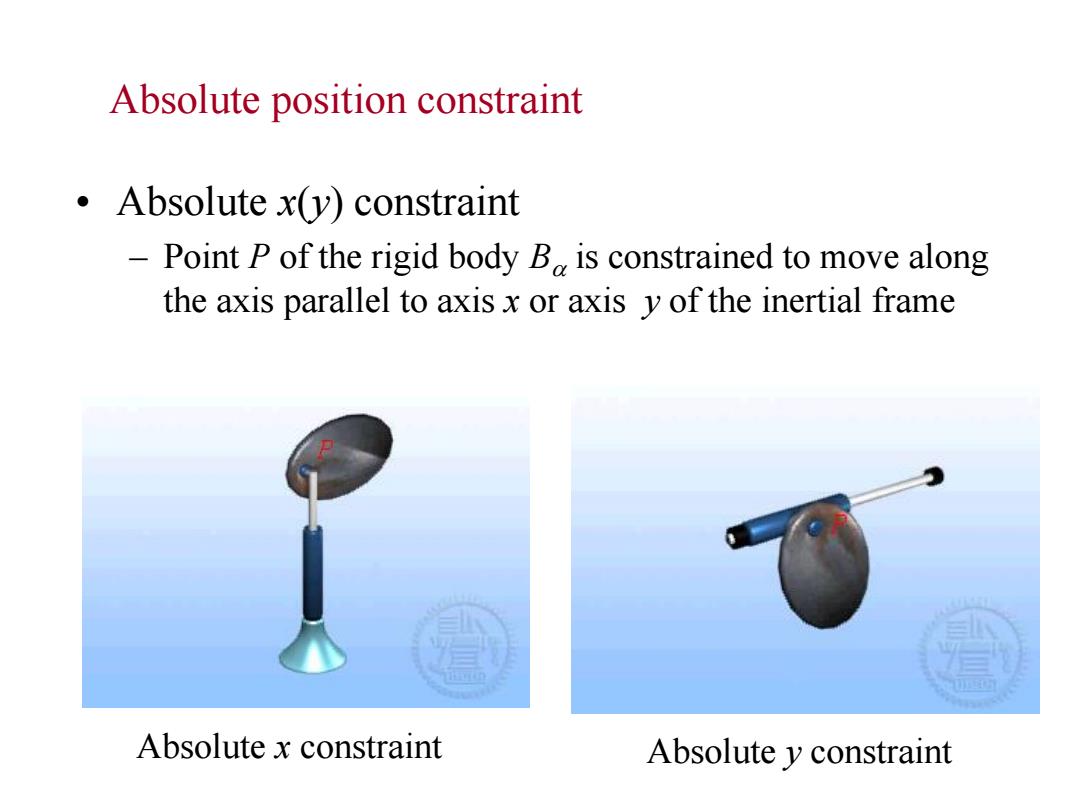
Absolute position constraint .Absolute x(y)constraint Point P of the rigid body B is constrained to move along the axis parallel to axis x or axis y of the inertial frame Absolute x constraint Absolute y constraint
Absolute position constraint • Absolute x(y) constraint – Point P of the rigid body Ba is constrained to move along the axis parallel to axis x or axis y of the inertial frame Absolute x constraint Absolute y constraint
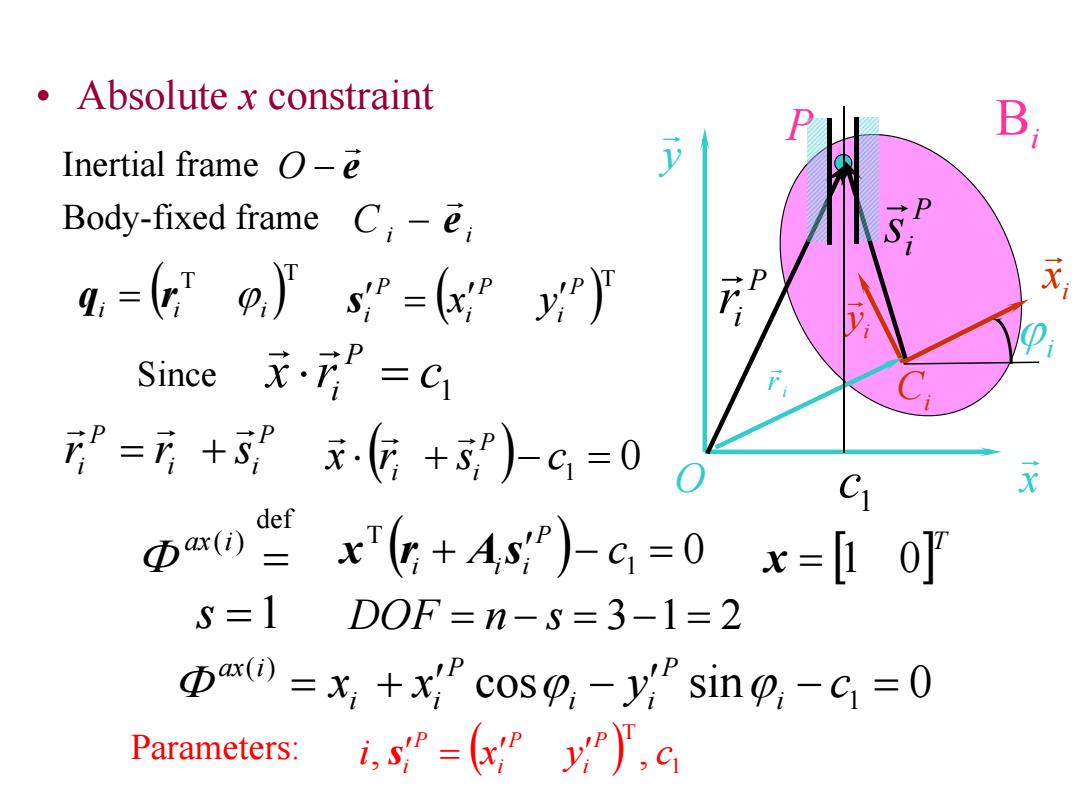
Absolute x constraint B, Inertial frame O-e Body-fixed frame C,-e ,=(9,'sP=x”P Since=C =元+.匠+)-c=0 C x def x6+4s)-G=0x=[0] S=1 DOF=n-S=3-1=2 pax()=x,+x cosp-y sinpi-c=0 Parameters: i,sP=(xy),c
• Absolute x constraint Bi y x O i x i y Ci i r i P P ir P i s 1 c e Inertial frame O Ci i e Body-fixed frame T T i i i q r T P i P i P i s x y 1 x r c P i P i i P ir r s def ( ) ax i 0 x r s c1 P i i 0 1 T c P i i i x r A s cos sin 0 1 ( ) x x y i c P i i P i i ax i Since Parameters: 1 T i, x y , c P i P i P i s T x 1 0 s 1 DOF n s 31 2
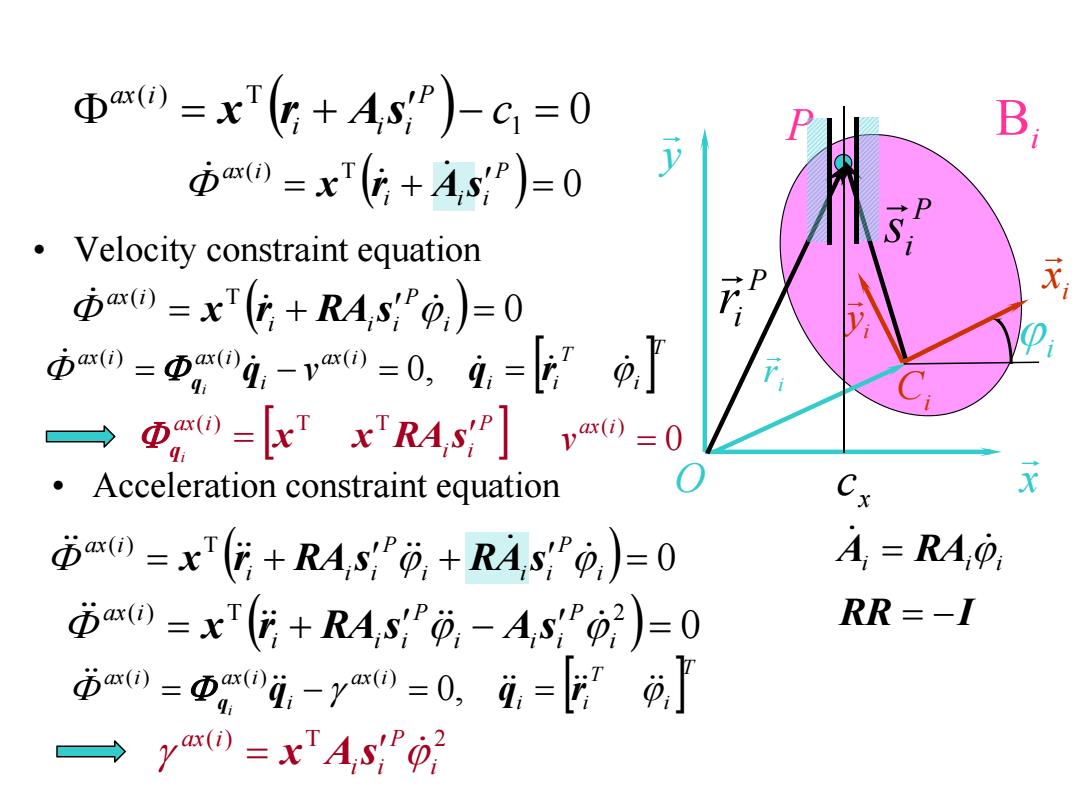
Φ)=xTG+AsP)-c=0 B 本0=xr(+AsP)=0 y Velocity constraint equation 市o=xr(G+RAsf0,)=0 市w=西,meg,-vaw=0,g,=上,J →Dm=erx'r4g]va0=0 Acceleration constraint equation Cx X p)=x"(+RAs",+RAs)=O A=RAO 本0=xT+RAs,-As2)=0 RR=-1 市m0=Φ,0i,-y0=0,4= →ym0=xAs02
• Velocity constraint equation 1 0 ( ) T c P i i i ax i x r As 0 ( ) T P i i i ax i x r A s 0 ( ) T i P i i i ax i x r RA s i ii ( ) T 0 A RA i P i i i P i i i ax i x r RA s RA s RR I 0 ( ) T 2 i P i i i P i i i ax i x r RA s A s • Acceleration constraint equation T i T i i ax i i ax i ax i v i q q r q 0, ( ) ( ) ( ) P i i ax i i x x RA s q ( ) T T T i T i i ax i i ax i ax i i q q r q 0, ( ) ( ) ( ) ( ) T 2 i P i i ax i x A s Bi y x O i x i y Ci i r i P P ir P i s x c 0 ( ) ax i v
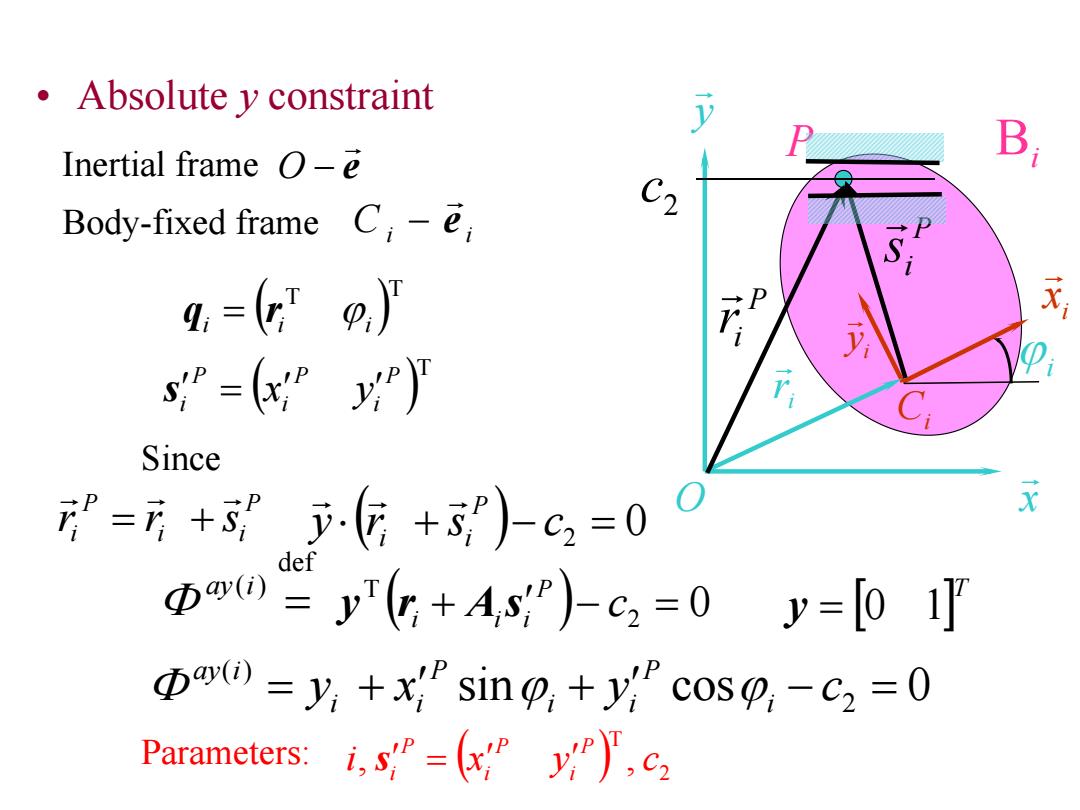
Absolute y constraint Inertial frame o-e B Body-fixed frame C-e C2 sP=(PP)J Since =元+5”,(+5)-02=00 X B0)=y+A,s;")-c2=0 y=[0 1 pardi)=y,+x sin +y cosp-c2=0 Parameters:,s=c
Bi y x O i x i y Ci i r i P P ir P i s 2 c • Absolute y constraint e Inertial frame O Ci i e Body-fixed frame T T i i i q r T P i P i P i s x y P i i P ir r s def ( ) ay i 0 y r s c2 P i i 0 2 T c P i i i y r A s sin cos 0 2 ( ) y x y i c P i i P i i ay i Since T y 0 1 Parameters: 2 T i, x y , c P i P i P i s