3.5 Driving constraint In addition to kinematic structure,the motion of mechanism is described by actuator inputs that specifies the time history of some position coordinates or the relative position of pairs of bodies. To uniquely determine the time history of motion of a mechanism,a number of inputs must be specified,equal in number of degrees of freedom of the system. Driving constraints are family of standard drivers
3.5 Driving constraint • In addition to kinematic structure, the motion of mechanism is described by actuator inputs that specifies the time history of some position coordinates or the relative position of pairs of bodies. • To uniquely determine the time history of motion of a mechanism, a number of inputs must be specified, equal in number of degrees of freedom of the system. • Driving constraints are family of standard drivers

3.5.1 Absolute Drivers Absolute position Driver Φad0=x-C1=x,+x”cos4,-y"sin4,-C()=0 出a=0-x-"cos4 yaxd()=C(t) C2y+G0 Xi +C (t) a0卡y-C, /cos4,C2()=0 =乙co-sirj v(=C2(t) X yo=y0+C,(0)=(sin4+Sr8s4)02+C,(0)
3.5.1 Absolute Drivers x i x i y y Pi P ir ir P i s C1(t) C2(t) cos sin ( ) 0 1 1 ( ) x C x x y i C t P i i P i i P i axd i i P i i P i axd i x y i 1 0 sin cos ( ) q ( ) 1 ( ) v C t axd i ( ) ( cos sin ) ( ) 1 2 1 ( ) ( ) C t x y C t i i P i i P i axd i ax i sin cos ( ) 0 2 2 ( ) y C y x y i C t P i i P i i P i ayd i i P i i P i ayd i x y i 0 1 cos sin ( ) q ( ) ( sin cos ) ( ) 2 2 2 ( ) ( ) C t x y C t i i P i i P i ayd i ay i ( ) 2 ( ) v C t ayd i Absolute position Driver
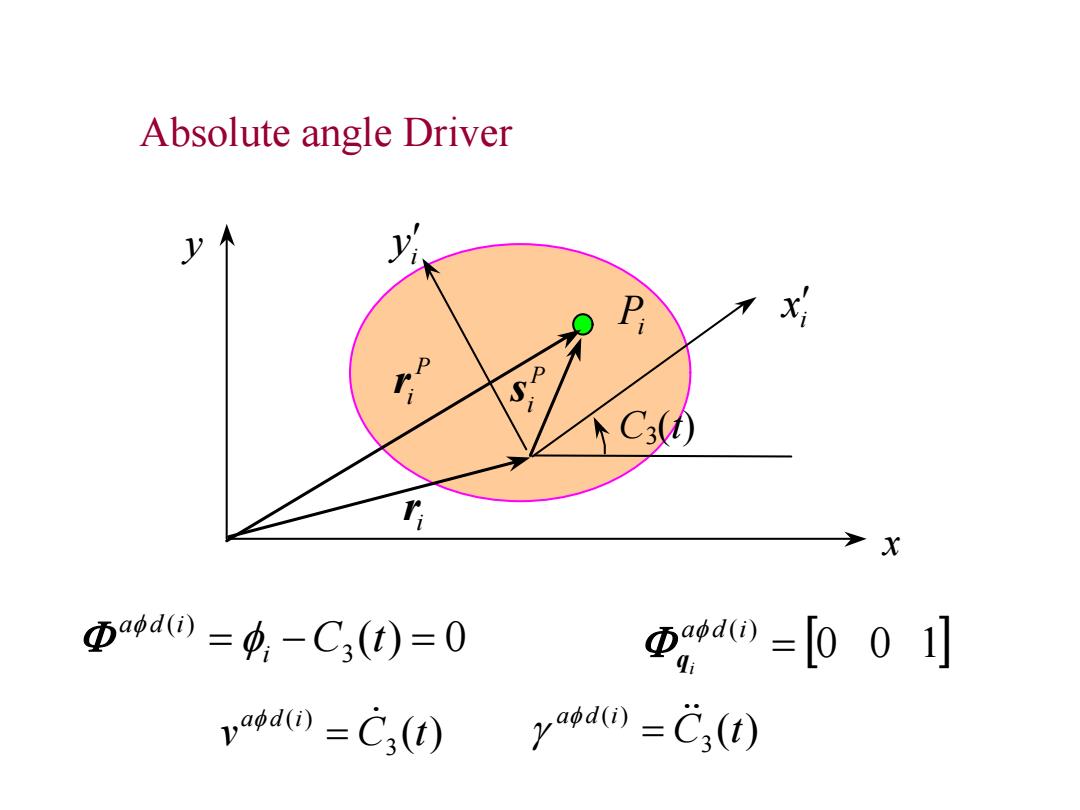
Absolute angle Driver P x C3④ X Φawdo=p,-C3(t)=0 电,do=[00刂 v0d@=C3(t) ya()=C(t)
3 ( ) 0 ( ) i C t a d i 0 0 1 ( ) a d i i q ( ) 3 ( ) C t a d i ( ) 3 ( ) v C t a d i x i x i y y Pi P ir ir P i s C3(t) Absolute angle Driver
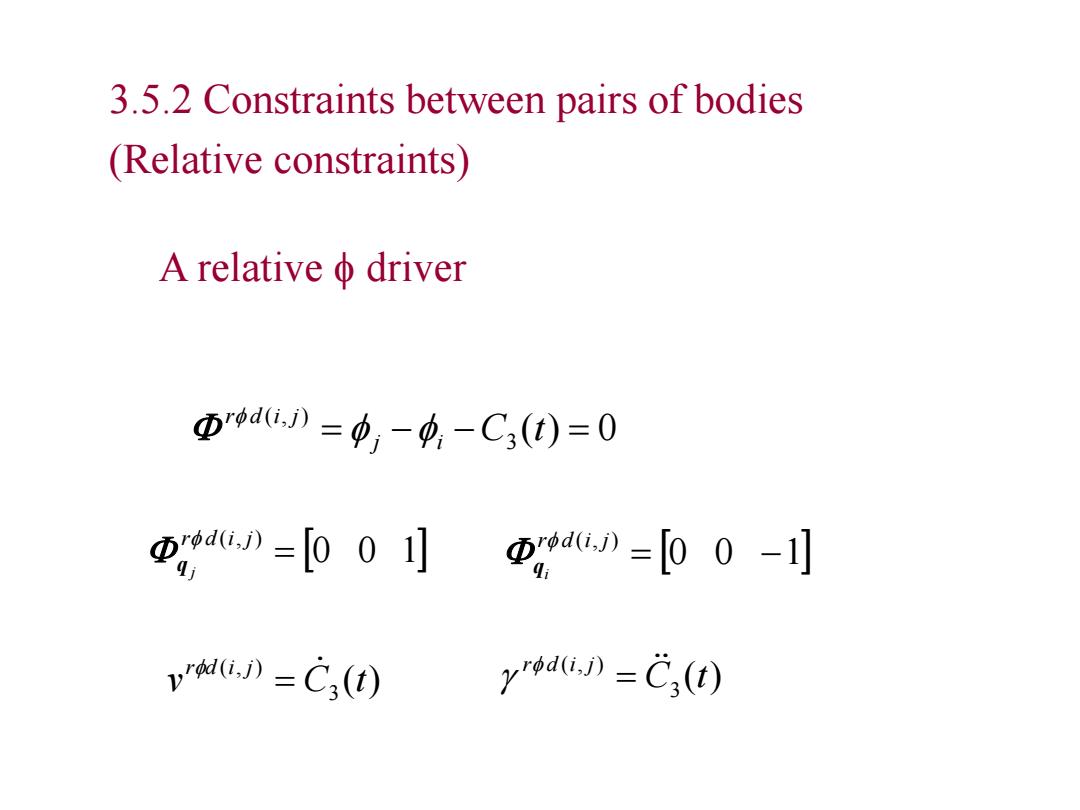
3.5.2 Constraints between pairs of bodies (Relative constraints) A relativeΦdriver Φrd》=中,-9,-C3()=0 Φgaw=[00] Dw》=[00-] v'aa》=C3(t)) yd(iD=C(t)
3.5.2 Constraints between pairs of bodies (Relative constraints) 3 ( ) 0 ( , ) j i C t r d i j 0 0 1 ( , ) r d i j j q 0 0 1 ( , ) r d i j i q ( ) 3 ( , ) v C t r d i j ( ) 3 ( , ) C t r d i j A relative driver
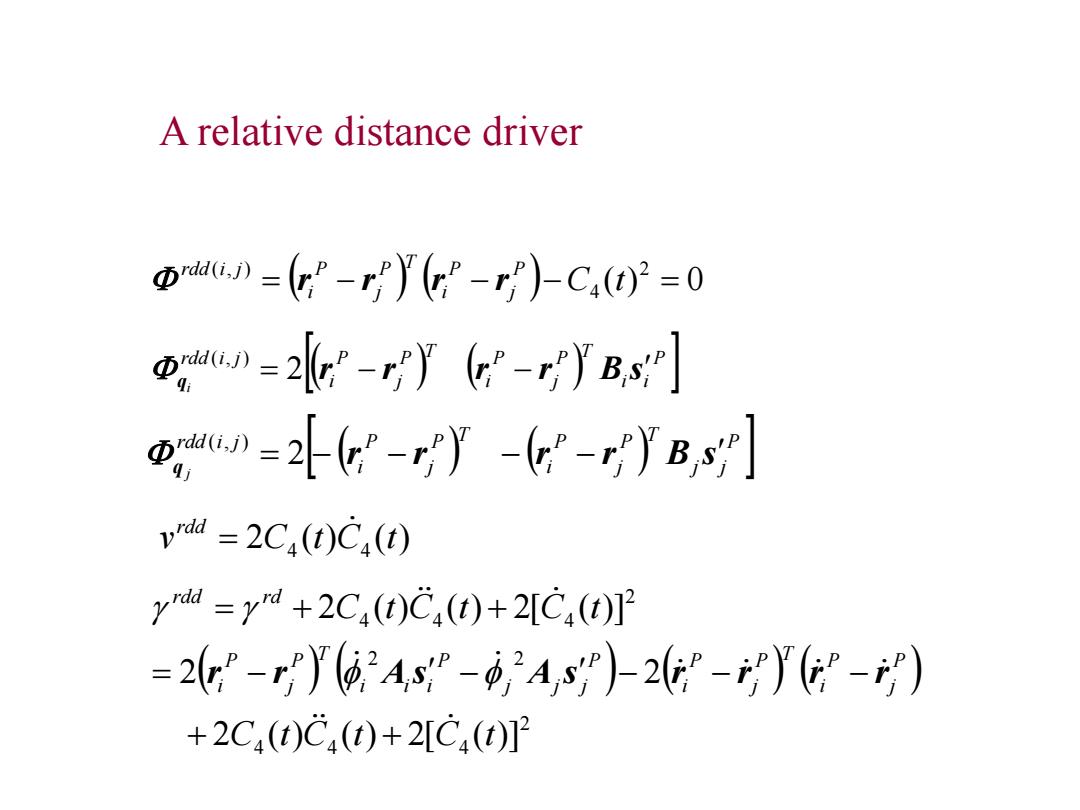
A relative distance driver 西》=(-ry(-r)-C4()2=0 》=2-Y(-ryBs] Φ》=2(P-ry-(-yB, v=2C4(t)C4(t) y=y+2C4(t)C4(t)+2[C4(t)] =20-62AsP-,2As)-26-y(-) +2C4(t)C4(t)+2[C4(t)]2
A relative distance driver ( ) 0 2 4 ( , ) C t P j P i T P j P i rdd i j r r r r P i i T P j P i T P j P i rdd i j i r r r r B s q 2 ( , ) P j j T P j P i T P j P i rdd i j j r r r r B s q 2 ( , ) 2 4 4 4 2 2 2 4 4 4 2 ( ) ( ) 2[ ( )] 2 2 2 ( ) ( ) 2[ ( )] C t C t C t C t C t C t P j P i T P j P i P j j j P i i i T P j P i rdd rd r r A s A s r r r r 2 ( ) ( ) 4 4 v C t C t rdd