3.3 Constraint between pairs of bodies Relative angle constraint ·Revolute joint 。Translational joint Relative distance constraint
2022年3月11日 3.3 Constraint between pairs of bodies • Relative angle constraint • Revolute joint • Translational joint • Relative distance constraint
Relative angle constraint B B;is constrained to undergo translational motion without rotation relative to b B 01-p,=C3 def ro(i,j) =p,-p,-C3=0 g=ggy4,=(9,4,=69,0 x DOF=n-s=6-1=5 市9u,》=p,-p,=0 D,w=[00刂 Φ,》=[00-1 v'o,》=0 Parameter: i,C3 ro1》=0,-0,=0 ra(=0
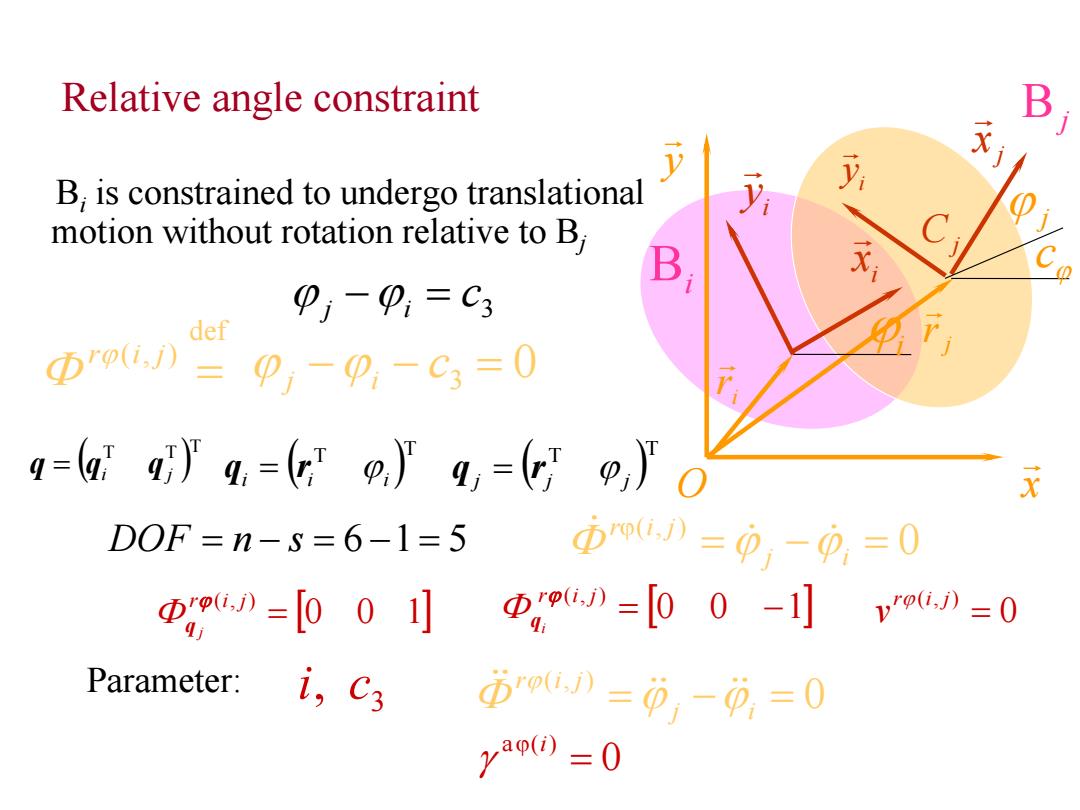
Relative angle constraint Bi is constrained to undergo translational motion without rotation relative to Bj j i c3 0 def ( , ) r i j 3 c j i • Velocity constraint equation 0 ( , ) j i r i j 0 ( , ) j i r i j 3 Parameter: i, c j r Bj y x O j x i y Cj j DOF n s 6 1 5 T T i i i q r 0 0 1 ( , ) r i j j q 0 a ( ) i 0 ( , ) r i j v T T j j j q r T T T q qi qj 0 0 1 ( , ) r i j i q i r i i x i y Bi c
Revolute joint Definition B;is constrained to undergo rotational motion without translation relative to B, Revolute constraint
Revolute joint • Definition Bi is constrained to undergo rotational motion without translation relative to Bj Revolute constraint
Description of the constraint Inertial frame O-e Body-fixed frame of B C 4=p)' Pointo sosy) Body-fixed frame of B,C,- 4,-g,)r Point p 5s=(kPyP)y Point P and Q coincide 9-=0r9-r=07+s9-1-s=0 def 鸿=+9 D》=r+A,s9-r-As”=0 =+
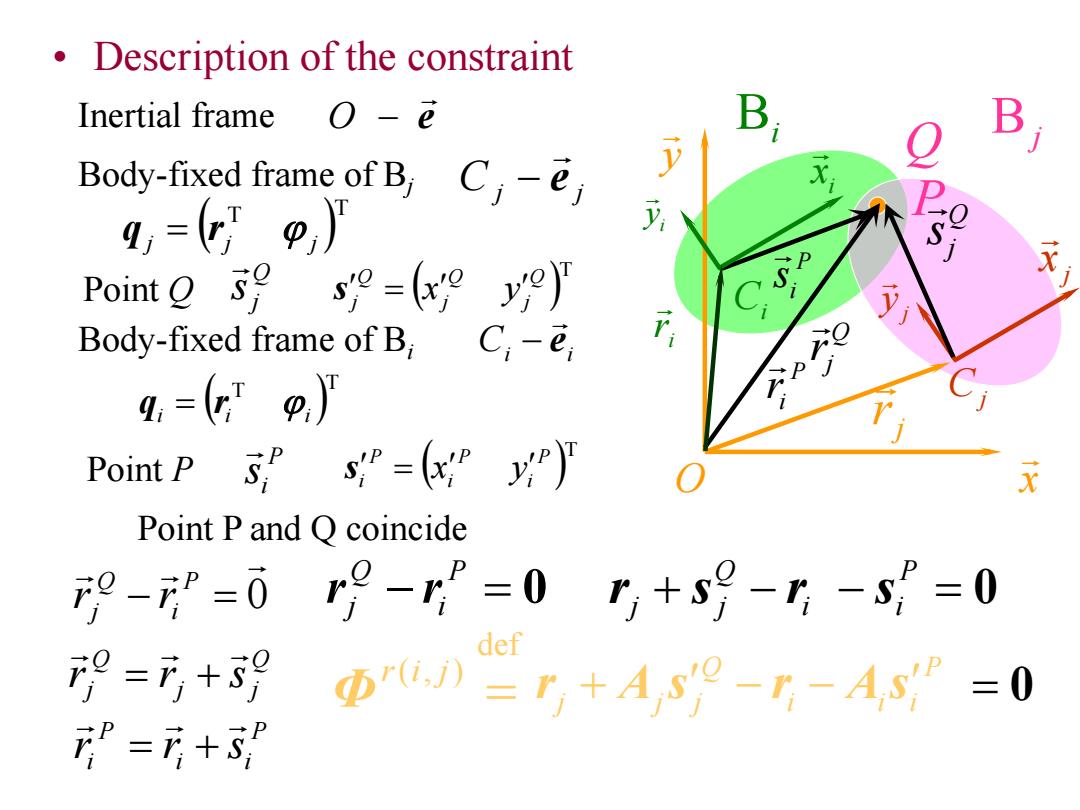
• Description of the constraint Bj y x O j x j y Cj j r Q Q j r Q j s e Inertial frame O C j j e Body-fixed frame of Bj T T j j j q r Point Q Q j s Q T j Q j Q j s x y Point P and Q coincide def ( , ) r i j Φ P i s T T i i i q r Point P P i s T P i P i P i s x y i x i y Ci P ir Q j j Q j r r s P i i P ir r s 0 P i Q j r r P i i i Q j j j r A s r A s 0 Bi i r 0 P i Q j r r 0 P i i Q j j r s r s Ci i e Body-fixed frame of Bi P
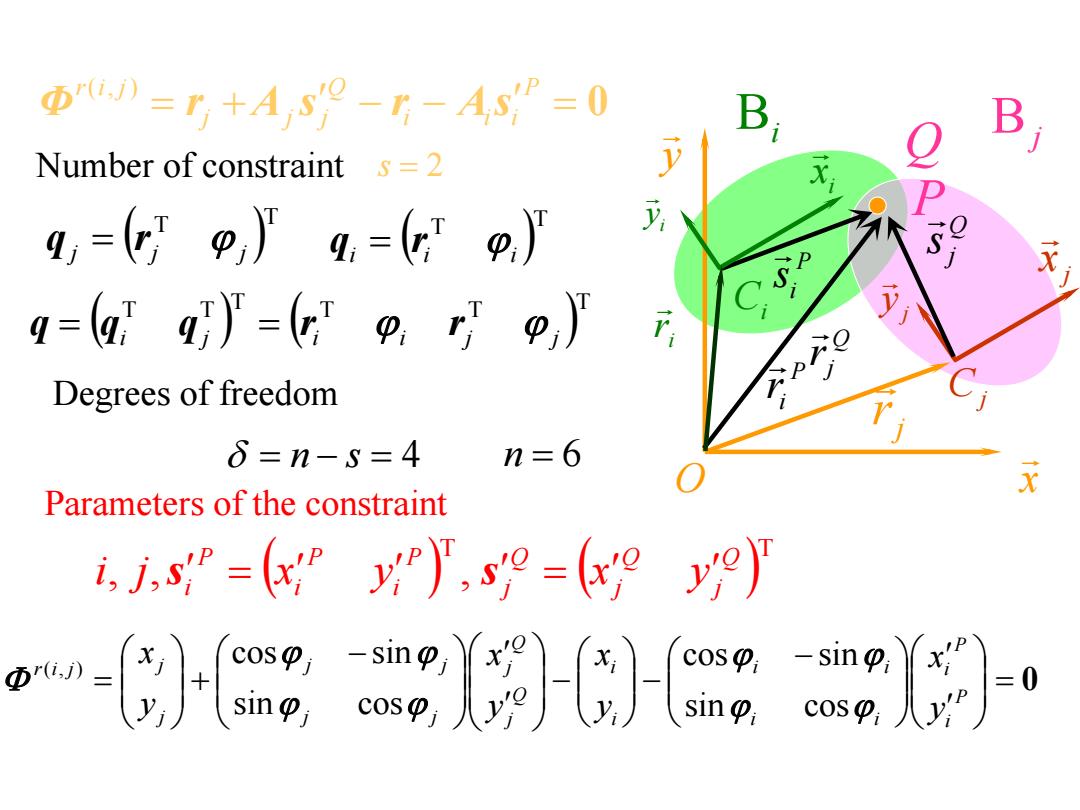
DuW=了+A,s9-1-AsP=0 Number of constraint s=2 4,=9,'9,=(9) q=gg)'=(9,yp, Degrees of freedom δ=n-S=4 n=6 Parameters of the constraint i,,s=y),s9=(x9) Φ》= 。agg儿-
T T , , , Q j Q j Q j P i P i P i i j s x y s x y s 2 Degrees of freedom n s 4 Number of constraint T T j j j q r Parameters of the constraint 0 P i i i Q j j j r i j Φ r A s r As ( , ) T T i i i q r T T T T T T i j i i j j q q q r r 0 P i P i i i i i i i Q j Q j j j j j j j r i j y x y x y x y x sin cos cos sin sin cos cos sin ( , ) n 6 Bj y x O j x j y Cj j r Q Q j r Q j s P i s i x i y Ci P ir Bi i r P