4.3进给电机及驱动 2)三相六拍工作方式 >通电顺序为:AABB→BC→C→CA→A.(逆时针) AAC-C-BC→BCA→A.(顺时针) B相通电 BC相通电 C相通电 AB相通电 A相通电 CA相通电 11
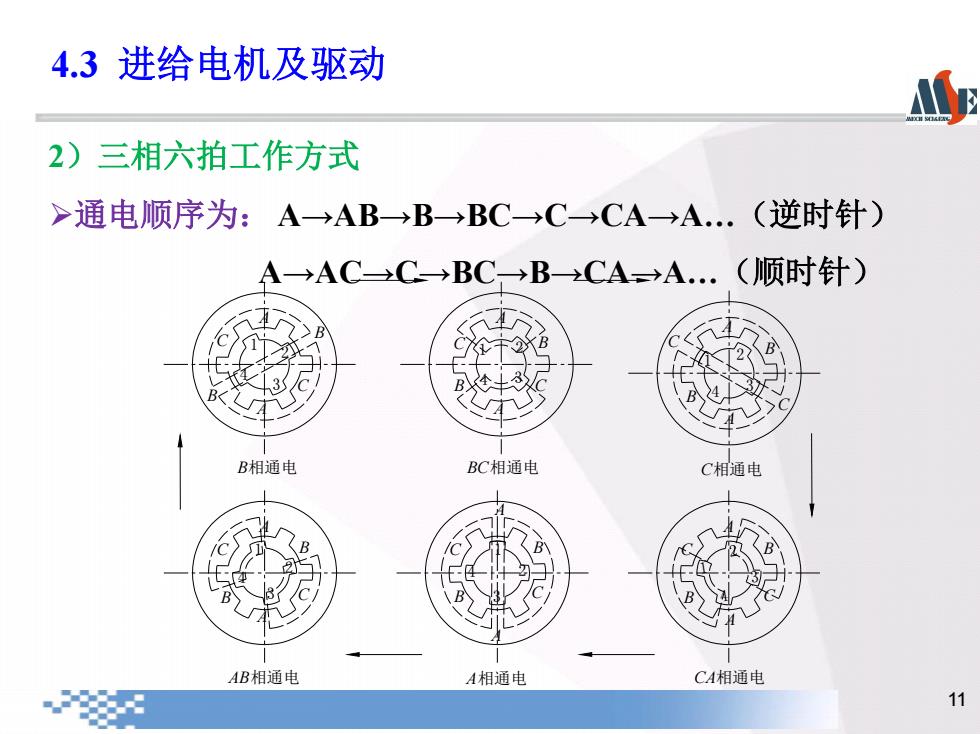
11 A B C A B B相通电 C A相通电 A B C A B C 1 2 3 4 C相通电 A B C A B C A B C A B BC相通电 C A B C A B CA相通电 C A B C A B AB相通电 C 1 2 4 3 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 2)三相六拍工作方式 通电顺序为: A→AB→B→BC→C→CA→A.(逆时针) A→AC→C→BC→B→CA→A.(顺时针) 4.3 进给电机及驱动
4.3进给电机及驱动 >三相六拍工作特点: ①每步转过15°,步距角是三相三拍工作方式的一半, ②电机运转中始终有一相定子绕组通电,运转比较平稳。 3)双三拍工作方式 >定子绕组通电顺序: AB→BC→CA→AB.(转子逆时针旋转) AC→BC→CA.(转子顺时针旋转) 有两对磁极同时对转子的两对齿进行吸引,每步仍旋转30°。 >双三拍工作特点:始终有一相定子绕组通电,工作比较平 稳。避免了单三拍通电方式的缺点。 网 12
12 三相六拍工作特点: ①每步转过15° ,步距角是三相三拍工作方式的一半, ②电机运转中始终有一相定子绕组通电,运转比较平稳。 3)双三拍工作方式 定子绕组通电顺序: AB→BC→CA→AB.(转子逆时针旋转) AC→BC→CA→.(转子顺时针旋转) 有两对磁极同时对转子的两对齿进行吸引,每步仍旋转30° 。 双三拍工作特点:始终有一相定子绕组通电,工作比较平 稳。避免了单三拍通电方式的缺点。 4.3 进给电机及驱动
4.3进给电机及驱动 3.步进电机实际结构: 转子齿数很多,齿数越多, 步距角越小。定子磁极上的齿的 齿距与转子的齿距相同,但各极 的齿依次与转子的齿错开齿距的1 /m(m电机相数)。 每次定子绕组通电状态改变时,转子只转过齿距的1/ (如三相三拍)或1/2m(如三相六拍)达到新的平衡位置。 13
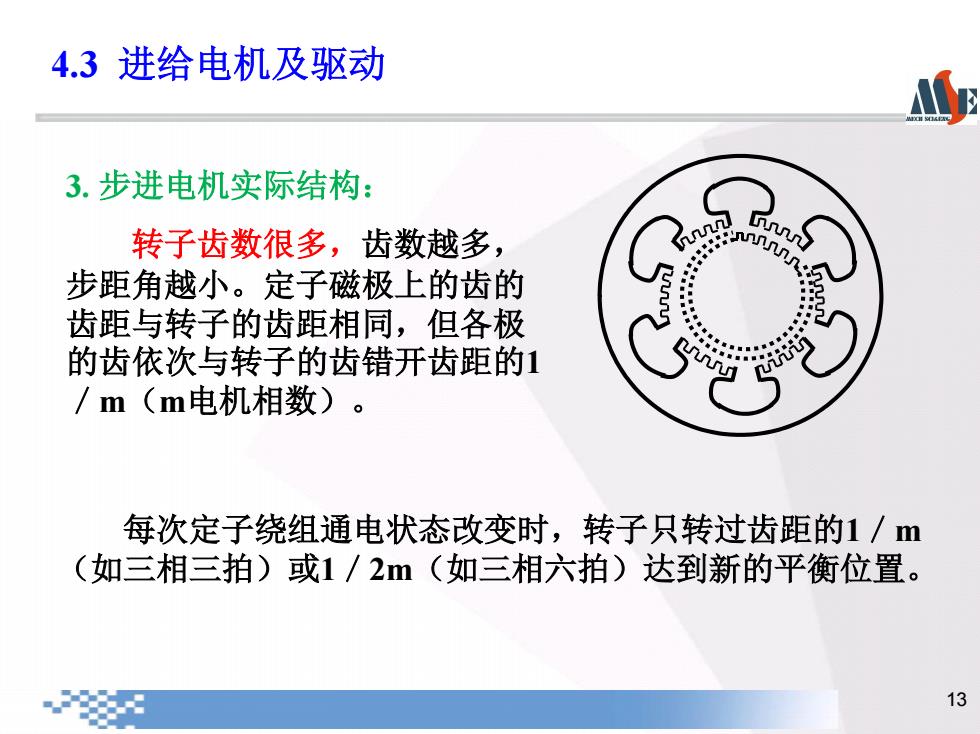
13 3. 步进电机实际结构: 转子齿数很多,齿数越多, 步距角越小。定子磁极上的齿的 齿距与转子的齿距相同,但各极 的齿依次与转子的齿错开齿距的1 /m(m电机相数)。 每次定子绕组通电状态改变时,转子只转过齿距的1/m (如三相三拍)或1/2m(如三相六拍)达到新的平衡位置。 4.3 进给电机及驱动
4.3进给电机及驱动 若转子40个齿,通电为三相三拍方式。当转子齿与A相 定子齿对齐时,转子齿与B相定子齿相差(3°),与C相定 子齿相差(6°)。 A相 B相 C相 各相定子 、 顺时针方向 转子齿展开 14
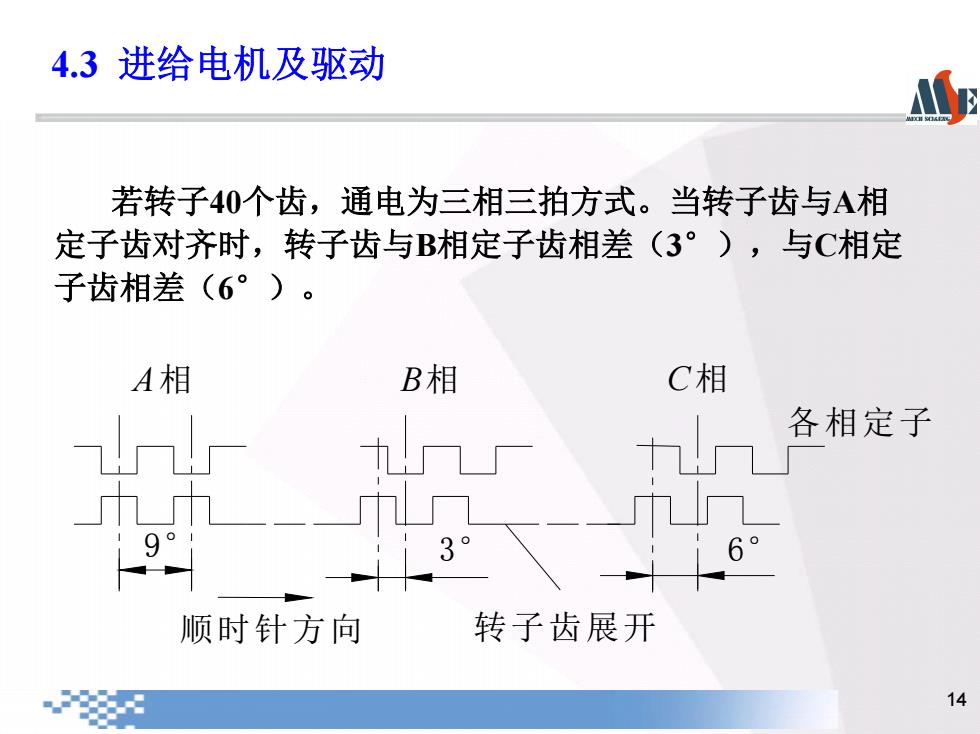
14 若转子40个齿,通电为三相三拍方式。当转子齿与A相 定子齿对齐时,转子齿与B相定子齿相差(3°),与C相定 子齿相差(6°)。 A相 各相定子 9° 3° 6° 顺时针方向 转子齿展开 B相 C相 4.3 进给电机及驱动