的增大,系统抗干扰能力下降。 (3)由于系统的增益和型次都未变化,因此对系统的稳态精 度无明显改善。 (4)相位超前校正的适用范围有限制。如果在未校正系统的 截止频率附近,相频特性的变化率很大,即相角减小得很快,则 采用单级相位超前校正的效果将不大。这是因为随着校正后的截 止频率向高频段的移动,相角在附近将减小得很快,于是在新的 截止频率上便很难得到足够大的相位裕度。 二、相位滞后校正 1.相位滞后校正环节 相位滞后校正环节可用下式表示: G.s)=+1 BTs+1 式中,B>1,T为常数。 此相位滞后环节的频率特性为G.(o)=+m@ 1+T0 (B>1) 其中,相频特性为 ZG(j@)=arctanTo arctan BT@<0 可见相位滞后。它的幅频特性为 .(Jo)-/(ToY+1 (BTo)+1 将G(Uo)分为实部u和虚部v,可求得 u-+r= 2B1 26
的增大,系统抗干扰能力下降。 (3)由于系统的增益和型次都未变化 ,因此对系统的稳态精 度无明显改善。 (4)相位超前校正的适用范围有限制 。如果在未校正系统的 截止频率附近,相频特性的变化率很大,即相角减小得很快,则 采用单级相位超前校正的效果将不大。这是因为随着校正后的截 止频率向高频段的移动,相角在附近将减小得很快,于是在新的 截止频率上便很难得到足够大的相位裕度。 二、相位滞后校正 1.相位滞后校正环节 相位滞后校正环节可用下式表示: 1 1 + + = Ts Ts G (s) c β , 式中, β > 1, T 为常数。 此相位滞后环节的频率特性为 β ω ω ω j T jT G j c + + = 1 1 ( ) (β > 1) 其中,相频特性为 ∠Gc ( jω) = arctanTω − arctan βTω < 0 可见相位滞后。它的幅频特性为 ( ) 1 ( ) 1 ( ) 2 2 + + = β ω ω ω T T G j c 将 G ( jω) c 分为实部 u 和虚部 v ,可求得 2 2 2 ) 2 1 ) ( 2 1 ( β β β β − + = + u − v
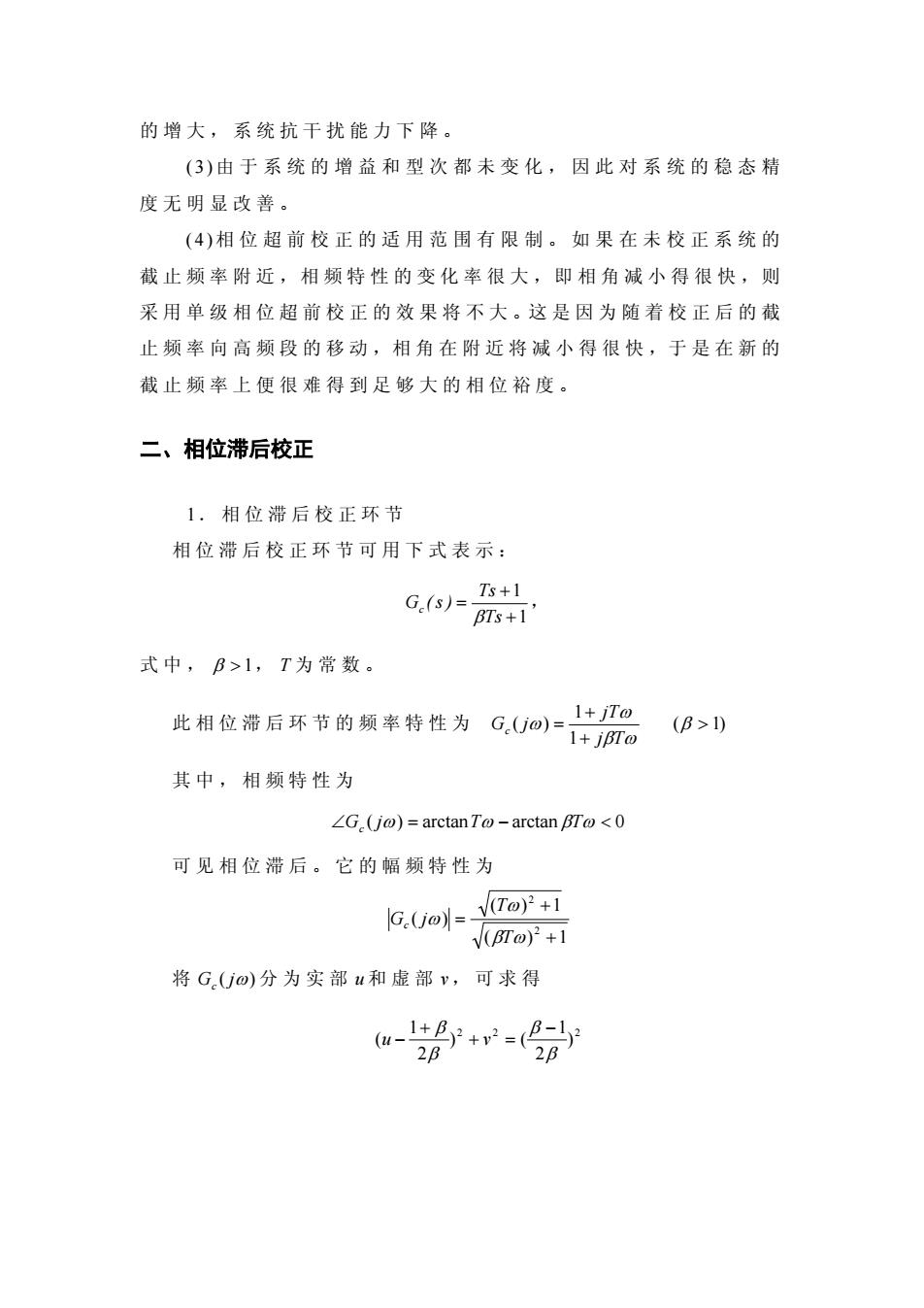
21+) 图6.3.4 可见,G.Uo)的Nyquist轨迹是一个过点(1j0),半径为0-合 圆心为+分0的半圆。又由于相角∠6.Uo)是负的,故G.Uo) 的Nyquist轨迹是下半圆,如图6.3.4所示。 若此环节的最大相位滞后角为?。,则 m.月别 图6.3.5是相位滞后环节的Bode图。其对数幅频特性中频段 的渐近线为直线,斜率为-20dB/dcc;零点转折频率a,=片:极 点转折频率a,=片m)设对应于0的频率为0,则0. 位于光m)和片的中点上。 由图6.3.4和6.3.5可知,滞后校正环节是一个低通环节,具 有很强的高频衰减作用。该环节校正的原理是:当增加系统的开 环增益时,其幅频特性曲线上移,而相频特性曲线则不变。此时, 如果保证片远远小于增益交接频率0。,则在0.附近系统开环增 益大大降低,而相位变化不大,这样,校正后系统的增益交接频 率。小于®,相位交接频率基本不变。又由于一般系统校正前 的开环相频特性在增益交接频率。附近是下降的,于是,系统的
图 6.3.4 可 见 ,G ( jω) c 的 Nyquist 轨迹是一个过点( 1,j0),半径为 ) 1 (1 2 1 β − , 圆心为 ), 0] 1 (1 2 1 [ j β + 的半圆。 又由于相角 G ( jω) ∠ c 是负的, 故 G ( jω) c 的 Nyquist 轨迹是下半圆,如图 6.3.4 所示。 若此环节的最大相位滞后角为 ϕ m , 则 1 1 sin + − = β β ϕ m 图 6.3.5 是相位滞后环节的 Bode 图 。其对数幅频特性中频段 的渐近线为直线,斜率为 − 20dB / dec ;零点转折频率 T T ω = 1 ; 极 点转折频率 ( T ) T β ω = 1 。设对应于 ϕ m 的频率为 ω m, 则 T m β ω 1 = , 位 于 ( βT ) 1 和 T 1 的中点上。 由 图 6.3.4 和 6.3.5 可 知 ,滞后校正环节是一个低通环节,具 有很强的高频衰减作用。该环节校正的原理是:当增加系统的开 环增益时,其幅频特性曲线上移,而相频特性曲线则不变。此时, 如果保证 T 1 远远小于增益交接频率 ωc ,则在 ωc 附近系统开环增 益大大降低,而相位变化不大,这样,校正后系统的增益交接频 率 c ω' 小 于 ωc ,相位交接频率基本不变。又由于一般系统校正前 的开环相频特性在增益交接频率 ωc 附近是下降的,于是,系统的