
第三章流体动力学基础 本章研究流体运动的基本规律及其在工程中的应用基础,介绍流体动力学的基本知识、 基木原理和基本方程。 第一节描述流体运动的两种方法 表征运动流体的物理量称为流体的流动参数。描沭流体运动就是要表法流体质点的流动 参数在不同空间位置上随时间连续变化的规律。在流体力学中,描述流体运动的方法有拉格 朗日(Lagrange)法和欧拉(Euler)法。 一、拉格朗日法 充满流体质点运动的空间称为流场。拉格朗日法从分析流体质点的运动着手,分析流动 参数随时间的变化规律,然后综合所有被研究流体质点的运动情况来获得整个流体运动的规 律。这种方法与理论力学中描述质点或质点系的方法一样。显然,这个方法可以了解每个流 体质点的运动规律 由于拉格朗日方法着眼于每个流体质点,需要找到一种方法用以区分不同的流体质点。 通常采用的方法是以初始时刻1。时,各质点的空间坐标(a,b,c)作为不同质点的区别 标志。在流体运动过程中,每一个质点的运动坐标不是独立变量,而是起始坐标(a,b,c) 和时间变量t的函数。人们把a,b,c,1叫做拉格朗日变数 流体质点的空间位置(x,y,:),可以表示为 x=x(a,b.c,t) y=ya,b,c,1) (3-1) =(a,b,c,t) 运动坐标对时间求导,则可得流体质点的速度 1,-dreexfa.b.c!) d at (a,b,c,1) (3-2 dt Gt ot =正_z(a,b,c,i) d 变数,把1看成常数,将得到1时刻流体质点的速度分布。 流体质点的加速度为 1
1 第三章 流体动力学基础 本章研究流体运动的基本规律及其在工程中的应用基础,介绍流体动力学的基本知识、 基本原理和基本方程。 第一节 描述流体运动的两种方法 表征运动流体的物理量称为流体的流动参数。描述流体运动就是要表达流体质点的流动 参数在不同空间位置上随时间连续变化的规律。在流体力学中,描述流体运动的方法有拉格 朗日(Lagrange)法和欧拉(Euler)法。 一、拉格朗日法 充满流体质点运动的空间称为流场。拉格朗日法从分析流体质点的运动着手,分析流动 参数随时间的变化规律,然后综合所有被研究流体质点的运动情况来获得整个流体运动的规 律。这种方法与理论力学中描述质点或质点系的方法一样。显然,这个方法可以了解每个流 体质点的运动规律。 由于拉格朗日方法着眼于每个流体质点,需要找到一种方法用以区分不同的流体质点。 通常采用的方法是以初始时刻 0 t 时,各质点的空间坐标( a , b , c )作为不同质点的区别 标志。在流体运动过程中,每一个质点的运动坐标不是独立变量,而是起始坐标( a ,b ,c ) 和时间变量 t 的函数。人们把 a, b , c , t 叫做拉格朗日变数。 流体质点的空间位置( x, y,z ),可以表示为 = = = ( , , , ) ( , , , ) ( , , , ) z z a b c t y y a b c t x x a b c t (3-1) 运动坐标对时间求导,则可得流体质点的速度 d d d d d d ( , , , ) ( , , , ) ( , , , ) x y z x x x a b c t v t t t y y y a b c t v t t t z z z a b c t v t t t = = = = = = = = = (3-2) 因为 a,b, c 不随时间变化,所以 t z t z t y t y t x t x = = = d d , d d , d d 。而在微分之后将 a,b, c 看成 变数,把 t 看成常数,将得到 t 时刻流体质点的速度分布。 流体质点的加速度为
a,-产-0a,6c0 01 (3-3) a-.ac 同样流体质点密度p、压力p和温度T等流动参数也可以表示为a,b,c和t的函数 p=p(a.b,c,1) p=p(a.b.c.t) (3-4) T=T(a,b,c,1)) 拉格朗日法可以描述任一流体质点的运动。但是,由于流体质点的运动轨迹非常复杂, 用拉格朗日法去分析流体运动时,方程的建立和数学处理将遇到很多困难。同时,工程上 般也不需要知道给定流体质点的运动规律。因此,除研究台风运动和波浪运动等特殊问题外 流体力学中通常不采用这种方法。 二、欧拉法 欧拉法不同于拉格朗日法。欧拉法的着眼点是空间点,即着眼于流体经过流场中各空间 点时的运动情况,而不关心这些运动特性是由哪些流体质点表现出来的,也不考虑流体质点 的来龙去脉,然后综合空间点上各质点的流动参数及其变化规律,用以描述整个流体的运动。 欧拉法用质点的空间坐标(x,y,:)与时间变量1来表达流场中的流体运动规律, (x,:,)称为欧拉变数。欧拉变数不是各自独立的,因为流体质点的空间位置x,y,:与运 动过程中的时间变量有关。不同的时间,各个流体质点对应不同的空间坐标,因而对任一流 体质点来说,其位置变量x,,:是时间1的函数。因此,流场中各空间点的流速所组成的速度 场可以表示为 v.=v.(x.y.=.0)=v.[().y().:()i] y,=v,(x,y,z,)=v[xy=) (3-5) y:=y(x3,)=v:x00= 由上式可以得到任一时刻(即【一定)流体质点速度在空间中的分布规律,也可以得到 任一空间点(即x,y,:一定)的流体质点速度随时间的变化规律。 同样,各空间点的其它流动参数组成的压强场、密度场、温度场等可以表示为 p=p(x.y.,1) o=D(x.V.3.t) (3-6) T=T(x.y.=.t)] 式(35)和(36)是空间的坐标(x,y,:)的函数,研究的是场,如速度场、压强 场、密度场、温度场等。因此说,采用欧拉法就可以利用场论的知识。 2
2 = = = = = = 2 2 2 2 2 2 ( , , , ) ( , , , ) ( , , , ) t z a b c t t v a t y a b c t t v a t x a b c t t v a z z y y x x (3-3) 同样流体质点密度 、压力 p 和温度 T 等流动参数也可以表示为 a , b , c 和 t 的函数 = = = ( , , , ) ( , , , ) ( , , , ) T T a b c t p p a b c t a b c t (3-4) 拉格朗日法可以描述任一流体质点的运动。但是,由于流体质点的运动轨迹非常复杂, 用拉格朗日法去分析流体运动时,方程的建立和数学处理将遇到很多困难。同时,工程上一 般也不需要知道给定流体质点的运动规律。因此,除研究台风运动和波浪运动等特殊问题外, 流体力学中通常不采用这种方法。 二、欧拉法 欧拉法不同于拉格朗日法。欧拉法的着眼点是空间点,即着眼于流体经过流场中各空间 点时的运动情况,而不关心这些运动特性是由哪些流体质点表现出来的,也不考虑流体质点 的来龙去脉,然后综合空间点上各质点的流动参数及其变化规律,用以描述整个流体的运动。 欧拉法用 质点的 空间坐 标( x, y,z )与时 间变量 t 来表达 流场中 的流体 运动规 律, ( x, y,z,t )称为欧拉变数。欧拉变数不是各自独立的,因为流体质点的空间位置 x, y,z 与运 动过程中的时间变量有关。不同的时间,各个流体质点对应不同的空间坐标,因而对任一流 体质点来说,其位置变量 x, y,z 是时间 t 的函数。因此,流场中各空间点的流速所组成的速度 场可以表示为 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) = = = = = = v v x y z t v x t y t z t t v v x y z t v x t y t z t t v v x y z t v x t y t z t t z z z y y y x x x ( , , , ) , , , ( , , , ) , , , ( , , , ) , , , (3-5) 由上式可以得到任一时刻(即 t 一定)流体质点速度在空间中的分布规律,也可以得到 任一空间点(即 x, y,z 一定)的流体质点速度随时间的变化规律。 同样,各空间点的其它流动参数组成的压强场、密度场、温度场等可以表示为 = = = ( , , , ) ( , , , ) ( , , , ) T T x y z t x y z t p p x y z t (3-6) 式(3-5)和(3-6)是空间的坐标( x , y , z )的函数,研究的是场,如速度场、压强 场、密度场、温度场等。因此说,采用欧拉法就可以利用场论的知识
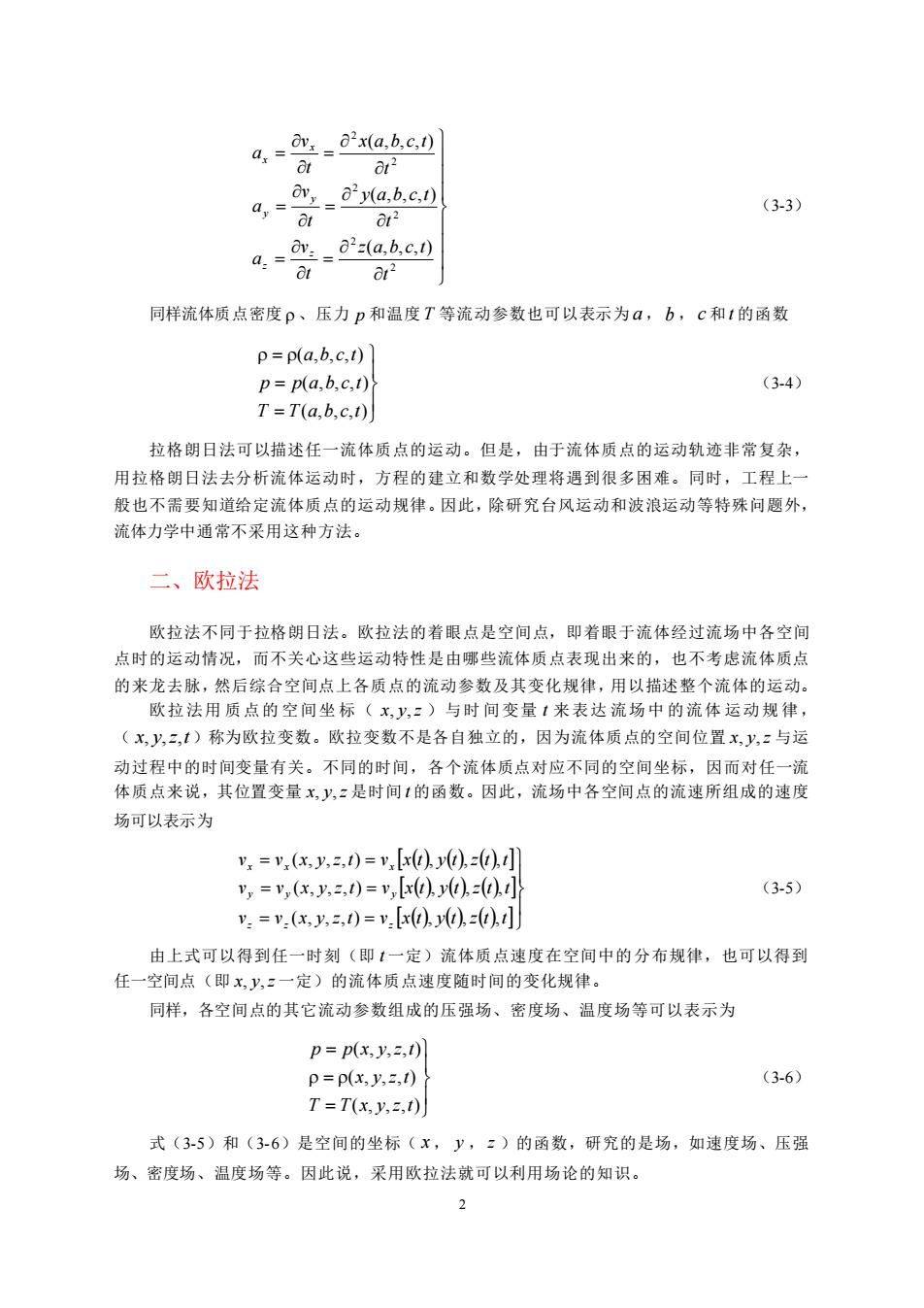
下面过论流体质点加速度的表示方法】 欧拉法中空间点的加速度是指某一时刻该空间点的流体质点的加速度,是空间点x,二, 的函数。由于质点本身的位置坐标(x,y,:)也是时间1的函数,因而自变量只有1。所 以说,质点的加速度不是1的简单一元函数,而是1的复合函数,其中间变量就是x=x) y=),z=。按照复合函数求导的法则可求得质点的加速度。 加速度在x方向的分量为 0变+出+等出产出 (3-7)】 dt 质点位置坐标(x,:)对时间的导数就是该质点的速度分量,即 dx 所以,可得加速度在空间坐标x,y:方向的分量 dv (3-8 若用v表示速度矢量、a表示加速度矢量,则上式可表示为 (3-9) 式中,P=i会+导+水是,称为哈密顿第子(opra》,它强然具有矢 量形式,但并非矢量:它只是对其后面所列的函数进行微分运算的一种符号。 由此可见,流体质点的加速度由两部分组成:第一部分”称为当地加速度或时变加速 度,它表示位于所观察点上的流体质点的速度随时间的变化率:第二部分(可加称为迁移加 速度或位变加速度,表示流体质点所在空间位置的变化所引起的速度变化率。两部分之和就 是流体质点的全加速度,又称为随体导数或质点导数,即流体质点速度随时间的变化率。它 们的物理概念可用图31所示的装置加以说明。水流经变径管流出,由于水箱中的水位逐渐 降低,变径管内同一点的流速随时间不断减小:同时,随着管径变小,同一时刻变径管内各 点的流速又沿程增加。前者引起的加速度就是当地加速度,后者引起的加速度就是迁移加速 图3-1 应用欧拉法研究流体运动时,常在流场中选取一个固定的空间区域来观察流体的运动, 这个固定的空间区域称为控制体,它的边界面称为控制面。控制体的形状、体积和位置根据
3 下面讨论流体质点加速度的表示方法。 欧拉法中空间点的加速度是指某一时刻该空间点的流体质点的加速度,是空间点 x, y,z,t 的函数。由于质点本身的位置坐标( x , y , z )也是时间 t 的函数,因而自变量只有 t 。所 以说,质点的加速度不是 t 的简单一元函数,而是 t 的复合函数,其中间变量就是 x = x(t), y = y(t), z = z(t) 。按照复合函数求导的法则可求得质点的加速度。 加速度在 x 方向的分量为 ( ) t z z v t y y v t x x v t v t v x y z t a x x x x x d d d d d d d d , , , x + + + = = (3-7) 质点位置坐标( x, y,z )对时间的导数就是该质点的速度分量,即 x v t x = d d , y v t y = d d , z v t z = d d 所以,可得加速度在空间坐标 x, y,z 方向的分量 + + + = = + + + = = + + + = = z v v y v v x v v t v t v a z v v y v v x v v t v t v a z v v y v v x v v t v t v a z x y z y z y y y x y y x z x y x x x x z z z z z y x d d d d d d (3-8) 若用 v 表示速度矢量、 a 表示加速度矢量,则上式可表示为 (v )v v v a + = = dt t d (3-9) 式中, x y z + + = i j k ,称为哈密顿算子(Hamiltonian operator),它虽然具有矢 量形式,但并非矢量;它只是对其后面所列的函数进行微分运算的一种符号。 由此可见,流体质点的加速度由两部分组成:第一部分 t v 称为当地加速度或时变加速 度,它表示位于所观察点上的流体质点的速度随时间的变化率;第二部分 (v )v 称为迁移加 速度或位变加速度,表示流体质点所在空间位置的变化所引起的速度变化率。两部分之和就 是流体质点的全加速度,又称为随体导数或质点导数,即流体质点速度随时间的变化率。它 们的物理概念可用图 3-1 所示的装置加以说明。水流经变径管流出,由于水箱中的水位逐渐 降低,变径管内同一点的流速随时间不断减小;同时,随着管径变小,同一时刻变径管内各 点的流速又沿程增加。前者引起的加速度就是当地加速度,后者引起的加速度就是迁移加速 度。 图 3-1 应用欧拉法研究流体运动时,常在流场中选取一个固定的空间区域来观察流体的运动, 这个固定的空间区域称为控制体,它的边界面称为控制面。控制体的形状、体积和位置根据
所研究的问题可以任意选取。 在流体力学中常用欧拉法。由前述讨论可知,欧拉法研究的是流场中每个固定空间点上 的流动参数的分布及随时间的变化规律,给出了某瞬时整个流场的流动参数分布,因而可以 用连续函数理论对流场进行有效的理论分析和计算。因为在大多数的工程实际问题中,不需 要知道每个流体质点自始至终的运动过程,只需要知道流体质点在通过空间任意固定点时流 动参数随时间的变化,以及某一时刻流场中各空间固定点上流体质点的流动参数,然后就可 以用数学方法对整个流场进行求解计算。其次,在欧拉法中,数学方程的求解较拉格朗日法 容易。再次,测量流体参数时,用欧拉法可将测试仪表周定在指定的空间点上,这种测量是 容易做到的。 第二节流体运动的基本概念 为了用欧拉法研究流体运动及建立流体动力学基本方程,首先必须了解一些流体运动中 的基本概念。 一、恒定流动与非恒定流动 如果流场中每一空间点上的流动参数都不随时间变化,这种流动就称为恒定流动,又称 为定常流动,否则称为非恒定流动或非定常流动。恒定流动中,流场内的速度、压力、密度 等所有的物理量只是空间坐标x,y,:的函数,与时间变量1无关, 即各流动参数的当地导数为零。 在恒定流动中,因为不包括时间变量1,因而流动的分析较非恒定流动要简单得多。在 实际工程问题中,如果流动参数随时间变化比较缓慢,在满足一定要求的前提下,可以将非 恒定流动作为恒定流动来处理。另外,确定流体运动是恒定流动或非恒定流动,与选取的坐 标系有关。例如,船在静止的水中等速直线行驶,船两侧的水流流动对于站在岸上的人看米 (即对于取固定在岸上的坐标系来讲)是非恒定流,而对于站在船上的人看来(即对于取固 定在船上的坐标系来讲)则是恒定流动。 二、流线与迹线 流体质点运动的轨迹称为迹线,它给出同一质点在不同时刻的速度方向。由迹线的形状 可以清楚地看出质点的流动情况,从而得出流场的参数分布和变化情况,迹线是拉格朗日法 分析流体运动的概念。 在液流中加入颜色不同且不易扩散的液滴,就可以观察到染了色的流体质点的迹线形状。 流线是指某一瞬时在流场中所作的一条假想的空间曲线,在该时刻,位于曲线上各点的 流体质点的速度在各点与流线相切(如图32)
4 所研究的问题可以任意选取。 在流体力学中常用欧拉法。由前述讨论可知,欧拉法研究的是流场中每个固定空间点上 的流动参数的分布及随时间的变化规律,给出了某瞬时整个流场的流动参数分布,因而可以 用连续函数理论对流场进行有效的理论分析和计算。因为在大多数的工程实际问题中,不需 要知道每个流体质点自始至终的运动过程,只需要知道流体质点在通过空间任意固定点时流 动参数随时间的变化,以及某一时刻流场中各空间固定点上流体质点的流动参数,然后就可 以用数学方法对整个流场进行求解计算。其次,在欧拉法中,数学方程的求解较拉格朗日法 容易。再次,测量流体参数时,用欧拉法可将测试仪表固定在指定的空间点上,这种测量是 容易做到的。 第二节 流体运动的基本概念 为了用欧拉法研究流体运动及建立流体动力学基本方程,首先必须了解一些流体运动中 的基本概念。 一、恒定流动与非恒定流动 如果流场中每一空间点上的流动参数都不随时间变化,这种流动就称为恒定流动,又称 为定常流动,否则称为非恒定流动或非定常流动。恒定流动中,流场内的速度、压力、密度 等所有的物理量只是空间坐标 x, y,z 的函数,与时间变量 t 无关, = 0 = = = t T t t p t v , 即各流动参数的当地导数为零。 在恒定流动中,因为不包括时间变量 t ,因而流动的分析较非恒定流动要简单得多。在 实际工程问题中,如果流动参数随时间变化比较缓慢,在满足一定要求的前提下,可以将非 恒定流动作为恒定流动来处理。另外,确定流体运动是恒定流动或非恒定流动,与选取的坐 标系有关。例如,船在静止的水中等速直线行驶,船两侧的水流流动对于站在岸上的人看来 (即对于取固定在岸上的坐标系来讲)是非恒定流,而对于站在船上的人看来(即对于取固 定在船上的坐标系来讲)则是恒定流动。 二、流线与迹线 流体质点运动的轨迹称为迹线,它给出同一质点在不同时刻的速度方向。由迹线的形状 可以清楚地看出质点的流动情况,从而得出流场的参数分布和变化情况,迹线是拉格朗日法 分析流体运动的概念。 在液流中加入颜色不同且不易扩散的液滴,就可以观察到染了色的流体质点的迹线形状。 流线是指某一瞬时在流场中所作的一条假想的空间曲线,在该时刻,位于曲线上各点的 流体质点的速度在各点与流线相切(如图 3-2)
图3-2 流线形象地给出了流场中的流动状态,通过流线可以清楚地看出某时刻流场中各点的速 度方向。显然,流线是欧拉法分析流体运动的概念。在流场内可以绘出一簇流线,所构成的 流线图称为流谱。 般情况下(除驻点或奇点),流线具有如下性质 (1)恒定流动中,流线形状不随时间变化,且流体质点的流线与迹线重合: (2)流线不能相交,不能突然转折,只能是一条光滑曲线。否则,在交点或转折点处将 有两个速度矢量,这意味者在同一时刻,同一流体质点具有两个运动方向,这是不可能的。 利用流线不能突然转折的性质,人们经常采用“流线型”来改善运动物体的动力性能」 如图3-3的尾部,由于流线不能突然转折,必然有一部分流体不能随主流一起运动,而被主 流带动产生了旋涡,消耗了能量,增大了运动物体的阻力。如果将物体的尾部改成“流线型”, 则可以减小尾部的旋涡,从而减小运动阻力,改善运动物体的动力性能。 图3.3 由流线的定义,可以建立流线的微分方程。 设流线上某一点的瞬时速度为 v=vi+vrj+vk (3.10) 流线上微元线段矢量为 ds=dxi+dyj+dk (3-11) 根据流线的定义,这两个矢量的方向一致,矢量积为零 vxds=0 (3.12) 写成投影形式,就是流线的微分方程 dr_dy_d正 (3-12) V,Vy V. 因为流线是某一时刻的曲线,所以时间变量1不是自变量,只能作为一个参变量。求某 指定时刻的流线时,需要把1当作常数带入上式,然后进行积分即可求得。 例3-1己知流速场为,=x+1,y,=-y+1,y=0。试求1=0时刻,通过点A(1,-1) 的流线。 解:由式(3-12),流线的微分方程是 dy 式中,1是参变量,当作常数,对上式积分,得 hc+)=-h(-y+)+hC 得流线方程为 (x+t0-y+)=C 由上式可知,任一瞬时的流线是一双曲线
5 图 3-2 流线形象地给出了流场中的流动状态,通过流线可以清楚地看出某时刻流场中各点的速 度方向。显然,流线是欧拉法分析流体运动的概念。在流场内可以绘出一簇流线,所构成的 流线图称为流谱。 一般情况下(除驻点或奇点),流线具有如下性质: (1)恒定流动中,流线形状不随时间变化,且流体质点的流线与迹线重合; (2)流线不能相交,不能突然转折,只能是一条光滑曲线。否则,在交点或转折点处将 有两个速度矢量,这意味着在同一时刻,同一流体质点具有两个运动方向,这是不可能的。 利用流线不能突然转折的性质,人们经常采用“流线型”来改善运动物体的动力性能。 如图 3-3 的尾部,由于流线不能突然转折,必然有一部分流体不能随主流一起运动,而被主 流带动产生了旋涡,消耗了能量,增大了运动物体的阻力。如果将物体的尾部改成“流线型”, 则可以减小尾部的旋涡,从而减小运动阻力,改善运动物体的动力性能。 图 3-3 由流线的定义,可以建立流线的微分方程。 设流线上某一点的瞬时速度为 v = v x i + vy j + vzk (3-10) 流线上微元线段矢量为 ds = dxi + dyj + dzk (3-11) 根据流线的定义,这两个矢量的方向一致,矢量积为零 vds = 0 (3-12) 写成投影形式,就是流线的微分方程 x y z v z v y v dx d d = = (3-12) 因为流线是某一时刻的曲线,所以时间变量 t 不是自变量,只能作为一个参变量。求某 一指定时刻的流线时,需要把 t 当作常数带入上式,然后进行积分即可求得。 例 3-1 已知流速场为 v x t x = + ,v y t y = − + ,vz = 0 。试求 t = 0 时刻,通过点 A(-1,-1) 的流线。 解:由式(3-12),流线的微分方程是 y t y x t x − + = + d d 式中, t 是参变量,当作常数,对上式积分,得 ln(x +t) = −ln(− y +t)+ ln C 得流线方程为 (x + t)(− y + t) = C 由上式可知,任一瞬时的流线是一双曲线