(2)神经网络间接自校正控制 其结构如图9-3所示。假设被控对象为如下单变 量仿射非线性系统: y(t)=f(y)+g(y)u(t) 若利用神经网络对非线性函数 和(y,)进布逼近 ,得到f(y,)和(),则控制器为: u()=r(-f(,)/g(y) 其中r()为t时刻的期望输出值
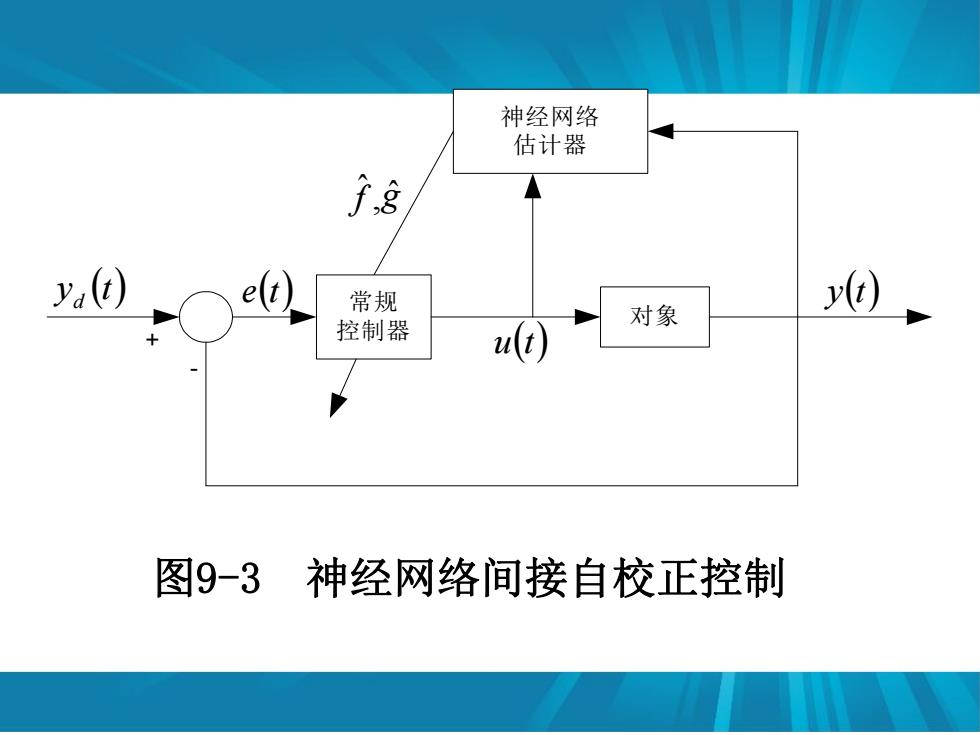
(2)神经网络间接自校正控制 其结构如图9-3所示。假设被控对象为如下单变 量仿射非线性系统: 若利用神经网络对非线性函数 和 进行逼近 ,得到 和 ,则控制器为: 其中 为t时刻的期望输出值。 ( ) ( ) t t y t f y g y u t f yt g yt ˆ t f y gˆ yt ˆ (t) / ˆ t t u t r f y g y rt
神经网络 估计器 yat) e(t) 常规 y() 控制器 对象 u(t) 图9-3 神经网络间接自校正控制
神经网络 估计器 常规 控制器 对象 y t d et ut yt + - fˆ ,gˆ 图9-3 神经网络间接自校正控制

2.神经网络模型参考自适应控制 分为直接模型参考自适应控制和间接模型参考自 适应控制两种。 (1)直接模型参考自适应控制 如图9-4所示。神经网络控制器的作用是使被控 对象与参考模型输出之差为最小。但该方法需要知道 oy 对象的Jacobian信息
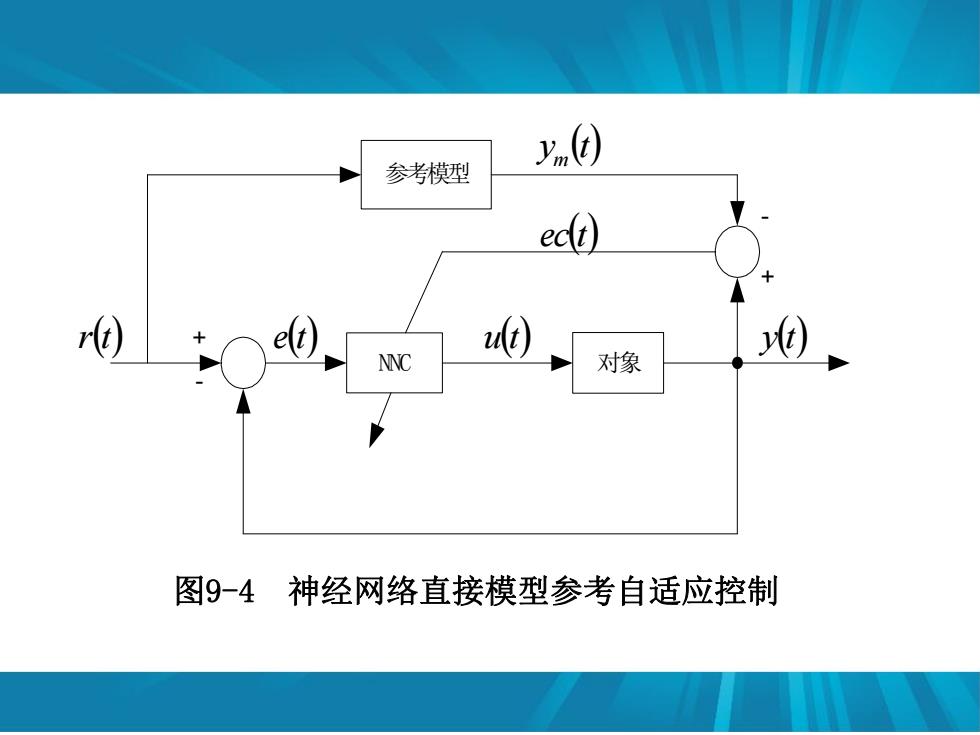
2. 神经网络模型参考自适应控制 分为直接模型参考自适应控制和间接模型参考自 适应控制两种。 (1)直接模型参考自适应控制 如图9-4所示。神经网络控制器的作用是使被控 对象与参考模型输出之差为最小。但该方法需要知道 对象的 Ja c o b ia n 信息 u 。 y
y同 参考模型 edi) 对像 图9-4神经网络直接模型参考自适应控制
参考模型 NNC 对象 rt + et ut yt - y t m ect + - 图9-4 神经网络直接模型参考自适应控制
(2)间接模型参考自适应控制 如图9-5所示。神经网络辨识器NNI向神经 网络控制器NNC提供对象的信息,用于控制器 NNC的学习
(2)间接模型参考自适应控制 如图9-5所示。神经网络辨识器NNI向神经 网络控制器NNC提供对象的信息,用于控制器 NNC的学习