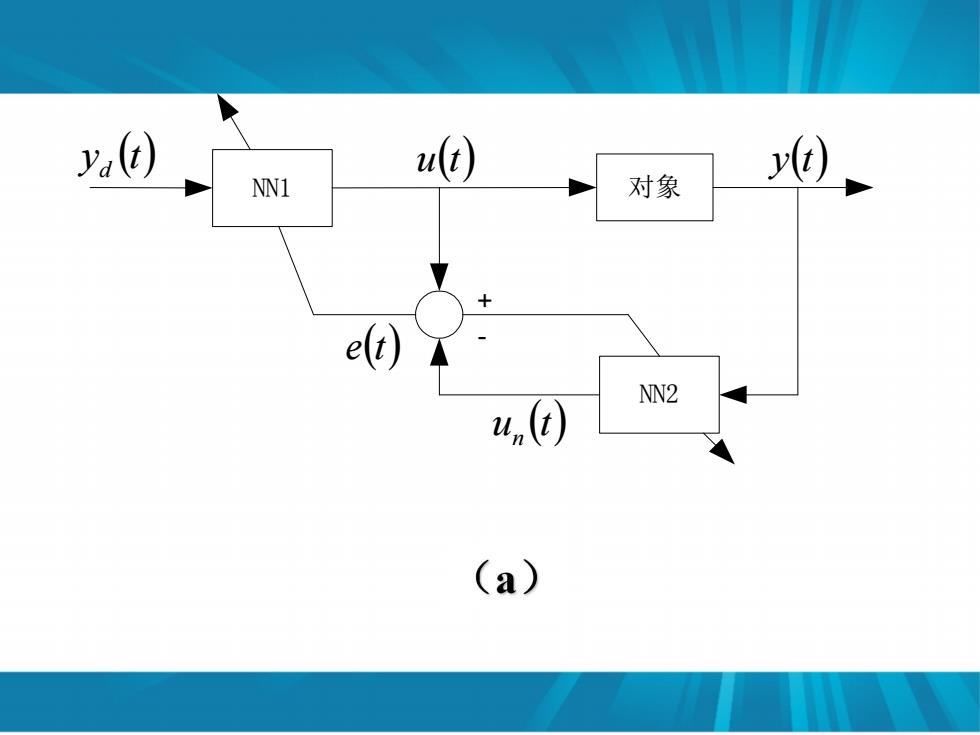
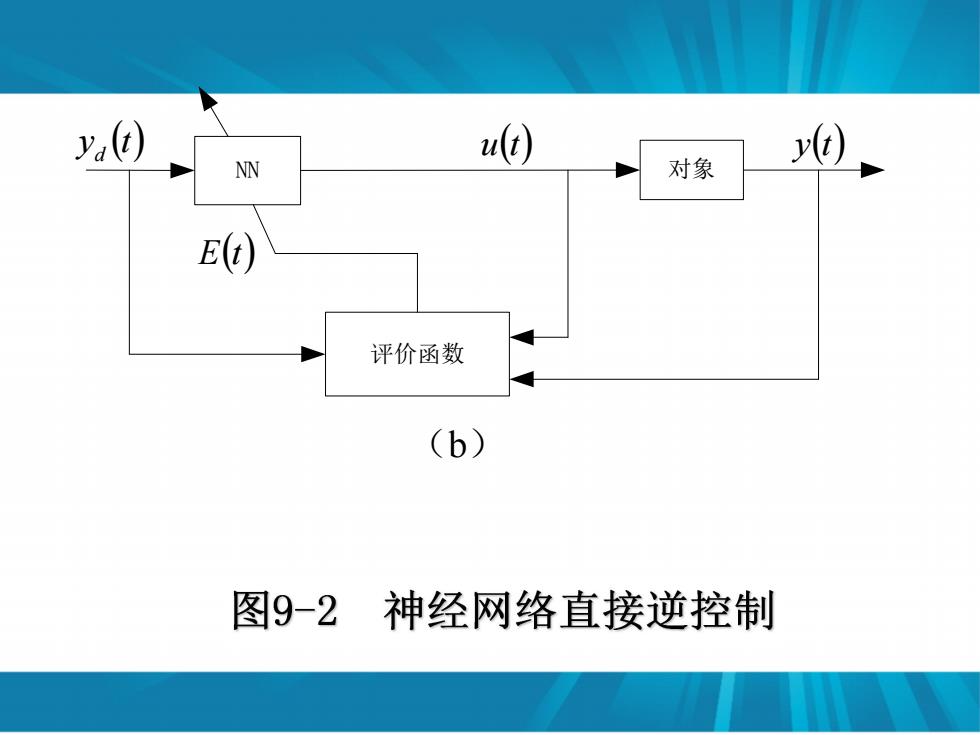
图9-2为神经网络直接逆控制的两种结构方案。 在图9-2(a)中,NN1和NN2为具有完全相同的网络结 构,并采用相同的学习算法,分别实现对象的逆。 在图9-2(b)中,神经网络NN通过评价函数进行学习, 实现对象的逆控制
图9-2为神经网络直接逆控制的两种结构方案。 在图9-2(a)中,NN1和NN2为具有完全相同的网络结 构,并采用相同的学习算法,分别实现对象的逆。 在图9-2(b)中,神经网络NN通过评价函数进行学习, 实现对象的逆控制
y.) ut) NN1 对象 e() Nn2 u,( (a)
对 象 y t d et yt u t n ut NN1 NN2 +-
y.() u() NN 对象 x) E( 评价函数 (b) 图9-2 神经网络直接逆控制
对 象 y t d Et ut yt NN 评价函数 (b)
9.2.3神经网络自适应控制 与传统自适应控制相同,神经网络自适应控制也 分为神经网络自校正控制和神经网络模型参考自适应 控制两种。自校正控制根据对系统正向或逆模型的结 果调节控制器内部参数,使系统满足给定的指标,而 在模型参考自适应控制中,闭环控制系统的期望性能 由一个稳定的参考模型来描述
与传统自适应控制相同,神经网络自适应控制也 分为神经网络自校正控制和神经网络模型参考自适应 控制两种。自校正控制根据对系统正向或逆模型的结 果调节控制器内部参数,使系统满足给定的指标,而 在模型参考自适应控制中,闭环控制系统的期望性能 由一个稳定的参考模型来描述

1神经网络自校正控制 神经网络自校正控制分为直接自校正控制和 间接自校正控制。间接自校正控制使用常规控制 器,神经网络估计器需要较高的建模精度。直接 自校正控制同时使用神经网络控制器和神经网络 估计器。 (1)神经网络直接自校正控制 在本质上同神经网络直接逆控制,其结构如 图9-2所示