y. 参考模型 e.) r() u( NNC 对象 NNC y.( 图95神经网络间接模型参考自适应控制
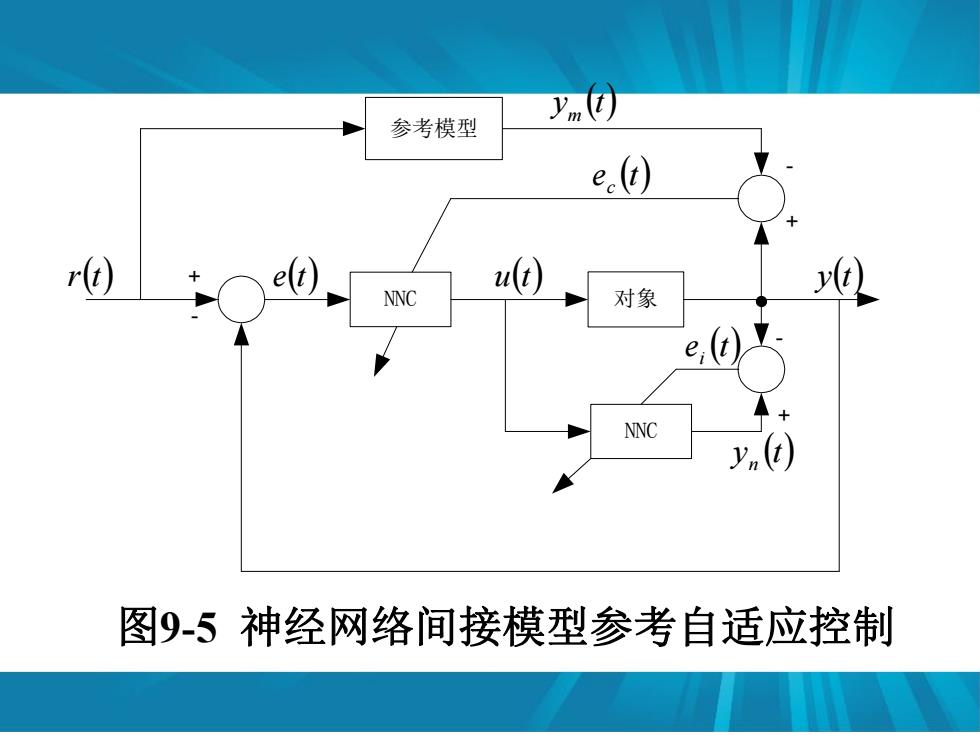
参考模型 NNC 对象 rt + et ut yt - y t m e t c + - NNC + - e t i y t n 图9-5 神经网络间接模型参考自适应控制
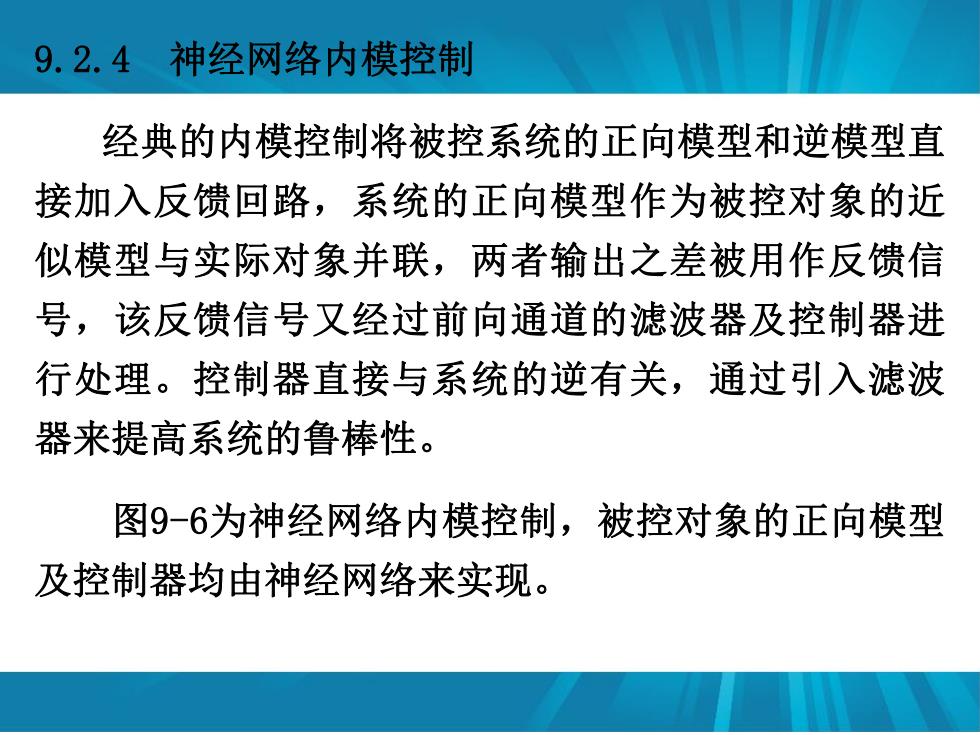
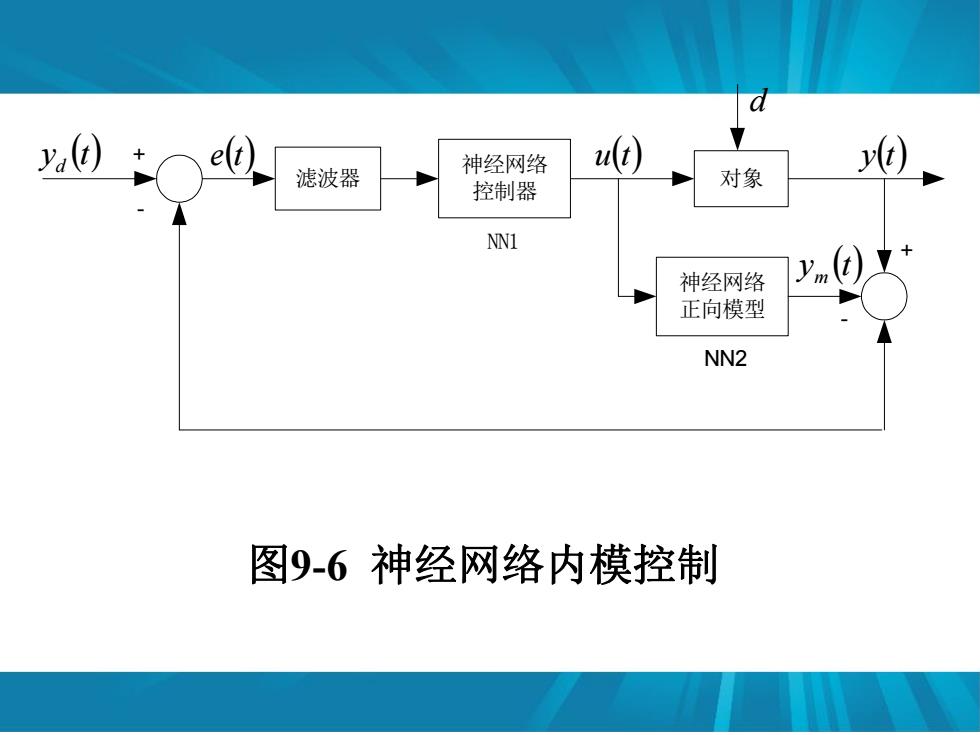
9.2.4神经网络内模控制 经典的内模控制将被控系统的正向模型和逆模型直 接加入反馈回路,系统的正向模型作为被控对象的近 似模型与实际对象并联,两者输出之差被用作反馈信 号,该反馈信号又经过前向通道的滤波器及控制器进 行处理。控制器直接与系统的逆有关,通过引入滤波 器来提高系统的鲁棒性。 图9-6为神经网络内模控制,被控对象的正向模型 及控制器均由神经网络来实现
9.2.4 神经网络内模控制 经典的内模控制将被控系统的正向模型和逆模型直 接加入反馈回路,系统的正向模型作为被控对象的近 似模型与实际对象并联,两者输出之差被用作反馈信 号,该反馈信号又经过前向通道的滤波器及控制器进 行处理。控制器直接与系统的逆有关,通过引入滤波 器来提高系统的鲁棒性。 图9-6为神经网络内模控制,被控对象的正向模型 及控制器均由神经网络来实现
() e(t) 滤波器 神经网络 u(t) 控制器 对象 NN1 神经网络 正向模型 NN2 图9-6神经网络内模控制
滤波器 对象 + - y t d et 神经网络 ut yt 控制器 神经网络 正向模型 NN1 NN2 y t m + - d 图9-6 神经网络内模控制
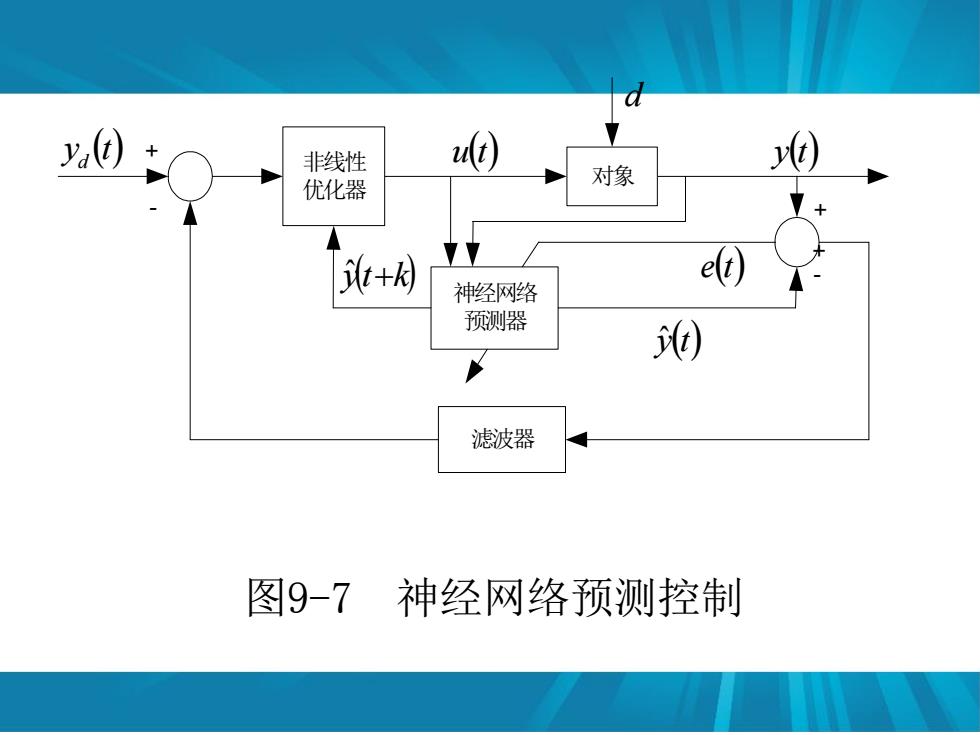
9.2.5神经网络预测控制 预测控制又称为基于模型的控制,是70年代后期发 展起来的新型计算机控制方法,该方法的特征是预测 模型、滚动优化和反馈校正。 神经网络预测控制的结构如图9-7所示,神经网络 预测器建立了非线性被控对象的预测模型,并可在线 进行学习修正。 利用此预测模型,通过设计优化性能指标,利用 非线性优化器可求出优化的控制作用)
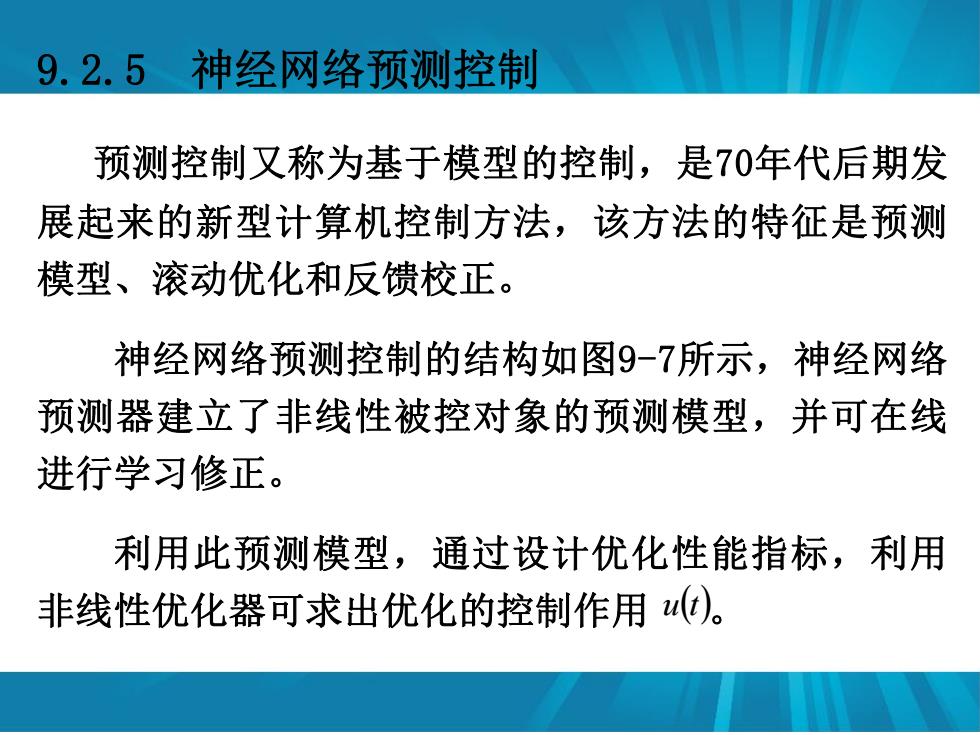
9.2.5 神经网络预测控制 预测控制又称为基于模型的控制,是70年代后期发 展起来的新型计算机控制方法,该方法的特征是预测 模型、滚动优化和反馈校正。 神经网络预测控制的结构如图9-7所示,神经网络 预测器建立了非线性被控对象的预测模型,并可在线 进行学习修正。 利用此预测模型,通过设计优化性能指标,利用 非线性优化器可求出优化的控制作用 u t
Y.) 非线性 u) 优化器 对象 t+网 7 神经网络 e() 预测器 0 滤波器 图9-7 神经网络预测控制
非线性 优化器 对象 + - y t d et ut yt + d 神经网络 预测器 滤波器 yˆt + yˆtk - 图9-7 神经网络预测控制