
神经网络控制在理论和实践上,以下问题是研究 的重点: ()神经网络的稳定性与收敛性问题; (2)神经网络控制系统的稳定性与收敛性问题; (3)神经网络学习算法的实时性; (4)神经网络控制器和辨识器的模型和结构
神经网络控制在理论和实践上,以下问题是研究 的重点: (1) 神经网络的稳定性与收敛性问题; (2) 神经网络控制系统的稳定性与收敛性问题; (3) 神经网络学习算法的实时性; (4) 神经网络控制器和辨识器的模型和结构
9.2神经网络控制结构 根据神经网络在控制器中的作用不同,神经网络控 制器可分为两类,一类为神经控制,它是以神经网络为 基础而形成的独立智能控制系统;另一类为混合神经网 络控制,它是指利用神经网络学习和优化能力来改善传 统控制的智能控制方法,如自适应神经网络控制等。 综合目前的各种分类方法,可将神经网络控制的结 构归结为以下七类
根据神经网络在控制器中的作用不同,神经网络控 制器可分为两类,一类为神经控制,它是以神经网络为 基础而形成的独立智能控制系统;另一类为混合神经网 络控制,它是指利用神经网络学习和优化能力来改善传 统控制的智能控制方法,如自适应神经网络控制等。 综合目前的各种分类方法,可将神经网络控制的结 构归结为以下七类。 9.2 神经网络控制结构
9.2.1神经网络监督控制 通过对传统控制器进行学习,然后用神经网络控制器逐渐 取代传统控制器的方法,称为神经网络监督控制。神经网络监 督控制的结构如图9-1所示。 神经网络控制器实际上是一个前馈控制器,它建立的是被 控对象的逆模型。神经网络控制器通过对传统控制器的输出进 行学习,在线调整网络的权值,使反馈控制输入趋近于零,从 而使神经网络控制器逐渐在控制作用中占据主导地位,最终取 消反馈控制器的作用。一旦系统出现干扰,反馈控制器重新起 作用。这种前馈加反馈的监督控制方法,不仅可以确保控制系 统的稳定性和鲁棒性,而且可有效地提高系统的精度和自适应 能力
9.2.1 神经网络监督控制 通过对传统控制器进行学习,然后用神经网络控制器逐渐 取代传统控制器的方法,称为神经网络监督控制。神经网络监 督控制的结构如图9-1所示。 神经网络控制器实际上是一个前馈控制器,它建立的是被 控对象的逆模型。神经网络控制器通过对传统控制器的输出进 行学习,在线调整网络的权值,使反馈控制输入趋近于零,从 而使神经网络控制器逐渐在控制作用中占据主导地位,最终取 消反馈控制器的作用。一旦系统出现干扰,反馈控制器重新起 作用。这种前馈加反馈的监督控制方法,不仅可以确保控制系 统的稳定性和鲁棒性,而且可有效地提高系统的精度和自适应 能力
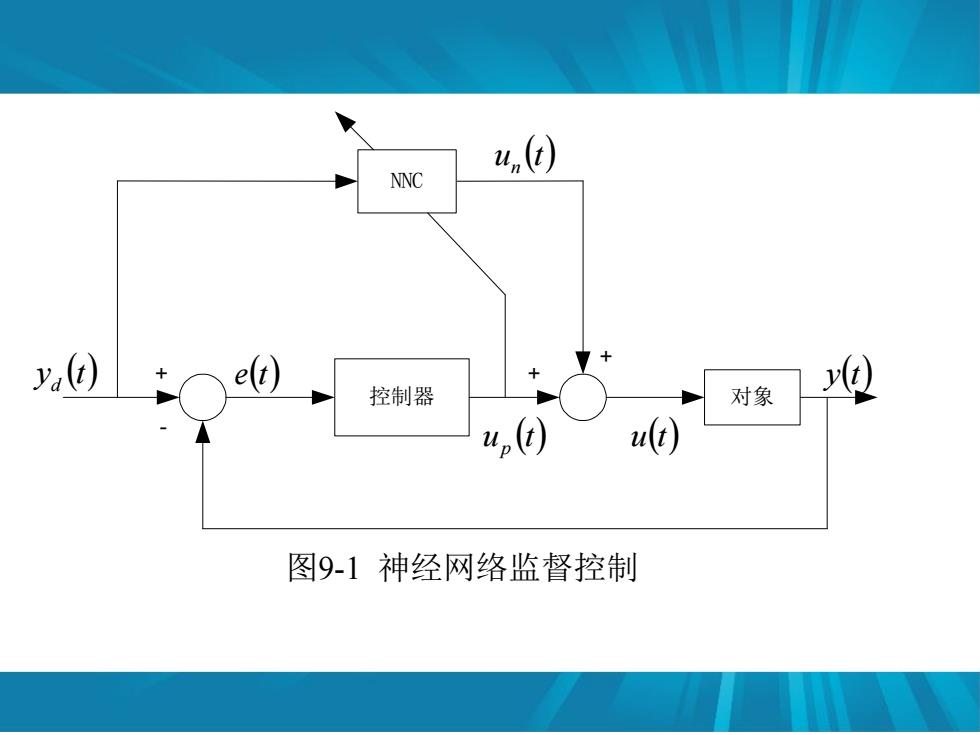
u,( NNc y.() e(t) 控制器 对象 4) u() 图9-1神经网络监督控制
NNC 控制器 对象 + - + + y t d et yt u t n u t p ut 图9-1 神经网络监督控制
9.2.2神经网络直接逆动态控制 神经网络直接逆控制就是将被控对象的神经网络 逆模型直接与被控对象串联起来,以便使期望输出与 对象实际输出之间的传递函数为1。则将此网络作为前 馈控制器后,被控对象的输出为期望输出。 显然,神经网络直接逆控制的可用性在相当程度 上取决于逆模型的准确精度。由于缺乏反馈,简单连 接的直接逆控制缺乏鲁棒性。为此,一般应使其具有 在线学习能力,即作为逆模型的神经网络连接权能够 在线调整