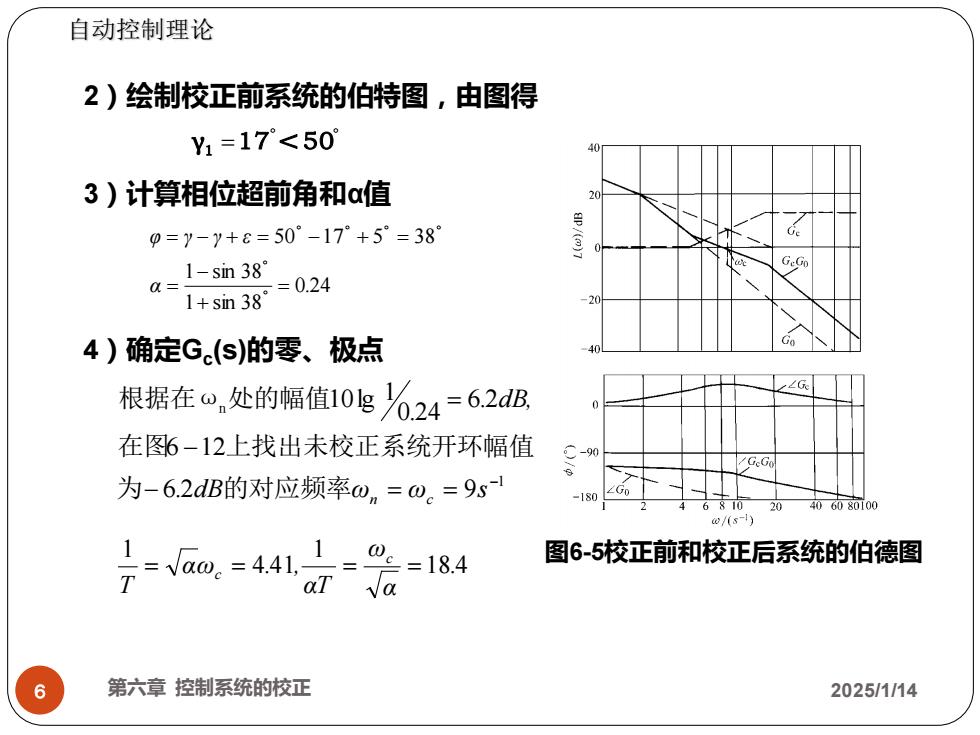
自动控制理论 2)绘制校正前系统的伯特图,由图得 Y1=17<50 0 3)计算相位超前角和α值 0=y-y+e=50°-17°+5°=381 Ge 1-sin 38 a= =0.24 1+sin 38 4)确定G(s)的零、极点 根据在@处的幅值10g%24=62dB 在图6-12上找出未校正系统开环幅值 -90 /GeGo 为-6.2dB的对应频率wn=0。=9s 180 4681020406080100 e/(s-) =a0.=4.41,=0==18.4 图6-5校正前和校正后系统的伯德图 aT-√a 第六章控制系统的校正 2025/1/14
6 第六章 控制系统的校正 2025/1/14 2)绘制校正前系统的伯特图,由图得 γ1 =17 <50 自动控制理论 图6-5校正前和校正后系统的伯德图 3)计算相位超前角和α值 0 24 1 sin 38 1 sin 38 50 17 5 38 α . φ γ γ ε = + − = = − + = − + = 4)确定Gc (s)的零、极点 1 6 2 9 6 12 6 2 0 24 10lg 1 − − = = − = . dB ω ω s . dB, . 为 的对应频率 n c 在图 上找出未校正系统开环幅值 根据在ωn处的幅值 18 4 1 4 41 1 . α ω αT αω . , T c = c = = =
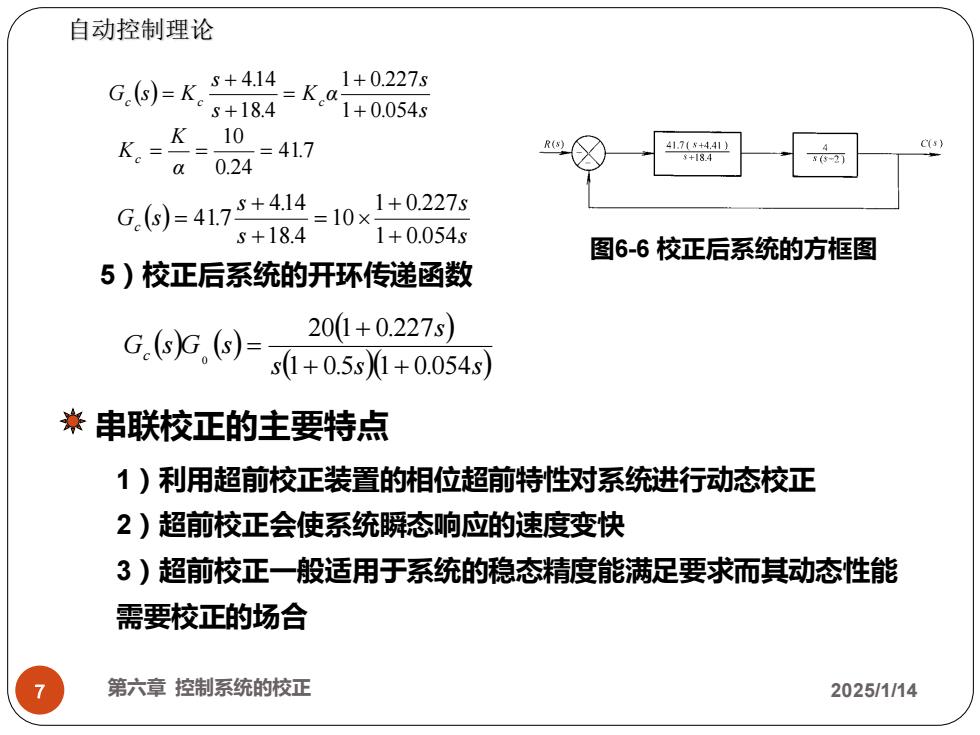
自动控制理论 G.6付)=K+44=K 1+0.227s s+18.4 1+0.054s K。=k、10 R(s Cs a0.24 =417 G.6)=4175+4.14 1+0.227s =10× s+18.4 1+0.054s 图6-6校正后系统的方框图 5)校正后系统的开环传递函数 G.(sXG,(s)- 201+0.227s) s1+0.5s1+0.054s) 米串联校正的主要特点 1)利用超前校正装置的相位超前特性对系统进行动态校正 2)超前校正会使系统瞬态响应的速度变快 3)超前校正一般适用于系统的稳态精度能满足要求而其动态性能 需要校正的场合 第六章控制系统的校正 2025/1/14
7 第六章 控制系统的校正 2025/1/14 ( ) . s . s s . s . G s . c 1 0 054 1 0 227 10 18 4 414 417 + + = + + = 自动控制理论 ( ) . s . s K α s . s . Gc s Kc c 1 0 054 1 0 227 18 4 414 + + = + + = 417 0 24 10 . α . K Kc = = = 5)校正后系统的开环传递函数 图6-6 校正后系统的方框图 ( ) ( ) ( ) s( . s)( . s) . s G s G s c 1 0 5 1 0 054 20 1 0 227 0 + + + = 串联校正的主要特点 1)利用超前校正装置的相位超前特性对系统进行动态校正 2)超前校正会使系统瞬态响应的速度变快 3)超前校正一般适用于系统的稳态精度能满足要求而其动态性能 需要校正的场合

自动控制理论 第三节滞后校正 米滞后校正的装置 1 G.)= Eo(s)=K.B- +、=K. S+ L(w) E,(s) 1+BTs 1 S+ BT -20dB/dec 201g(1/8 其中T=RC,B=R,C2, B R.C.>1.K.= RC RC C2 令KB=K,则 G.()=K1+7乃 图6-7滞后校正装置的伯德图 1+BTs 8 第六章控制系统的校正 2025/1/14
第三节 滞后校正 8 第六章 控制系统的校正 2025/1/14 滞后校正的装置 ( ) ( ) ( ) ( ) βTs Ts G s K K β K R C R C > ,K R C R C β T R C ,ββ R C , βT s T s K βTs Ts K β E s E s G s c c c c c i c + + = = = = = = + + = + + = = 1 1 1 1 1 1 1 3 2 4 1 1 1 2 2 1 1 2 2 0 令 ,则 其中 图6-7 滞后校正装置的伯德图 自动控制理论
自动控制理论 米基于频率响应的滞后校正 1 例6-4G(S)= s(s+0.5s)1+s) 解:1)调整K G)= 1 ss+0.5s1+s) K,lim Go(s)=K=5s- 2)作未校正系统的Bode图 G(jw)= 5 jo1+j0.5w1+jw) w°=2.15,y=-20 系统不稳定 9 第六章控制系统的校正 2025/1/14
( ) ( )( ) ( ) 1 0 0 0 lim 5 0 5 1 1 − → = = = + + = K G s K s s s . s s G s s v 系统不稳定 9 第六章 控制系统的校正 2025/1/14 基于频率响应的滞后校正 例6-4 ( ) s(s . s)( s) G s + + = 0 5 1 1 0 解:1)调整K 2)作未校正系统的Bode图 自动控制理论 ( ) ( )( ) = = − + + = 215 20 1 0 5 1 5 1 ω . ,γ jω j . ω jω G jω c