
1.线性离散控制系统的脉冲传递函数求取方法。 2.线性离散控制系统的离散状态空间描述 3.连续系统状态方程的离散化。 4.线性定常系统稳定性分析」 5.离散控制系统的稳态误差分析。 第十章离散控制系统的经典法设计(4学时) 1.控制系统的离散化方法。 2.PD控制器及其算式。 3.数字PD控制器的参数整定 第十二章状态空间分析和设计(4学时) 1离散控制系统的可控性和可观性 2.离散控制系统状态反馈的极点配置设计。 第十三章离散控制系统设计与实现(2学时) 1.离散控制系统设计的基本原则。 2.离散控制系统设计的主要步骤。 3.离散控制系统的设计及实现过程 七、达成课程目标的途径和措施 1.课程以课堂授课为主,理论授课64学时,教师启发式讲授与课堂讨论互动与答疑等 相结合。 2.授课过程始终把握主线,注重数学推导和建立物理概念相结合,注重前后内容的逻 辑关联性,帮助学生建立脉络清晰、概念统一的认识。 3.通过多个环节的训练、考核和互动调节,促进学习目标的达成: (1)习题作业 (2)随堂测试 (3)小组讨论 (4)课程报告 (5)期中考试(以课程前半学期的学习内容作为考核内容) (6)期末考试(以课程后半学期的学习内容为主) 4.成绩评定 平时 期中考试 期末考试 10y% 40% 50% 八、课程目标对毕业要求的支撑
6 1. 线性离散控制系统的脉冲传递函数求取方法。 2. 线性离散控制系统的离散状态空间描述。 3. 连续系统状态方程的离散化。 4. 线性定常系统稳定性分析。 5. 离散控制系统的稳态误差分析。 第十章 离散控制系统的经典法设计(4 学时) 1. 控制系统的离散化方法。 2. PID 控制器及其算式。 3. 数字 PID 控制器的参数整定。 第十二章 状态空间分析和设计(4 学时) 1. 离散控制系统的可控性和可观性。 2. 离散控制系统状态反馈的极点配置设计。 第十三章 离散控制系统设计与实现(2 学时) 1. 离散控制系统设计的基本原则。 2. 离散控制系统设计的主要步骤。 3. 离散控制系统的设计及实现过程。 七、达成课程目标的途径和措施 1. 课程以课堂授课为主,理论授课 64 学时,教师启发式讲授与课堂讨论互动与答疑等 相结合。 2. 授课过程始终把握主线,注重数学推导和建立物理概念相结合,注重前后内容的逻 辑关联性,帮助学生建立脉络清晰、概念统一的认识。 3. 通过多个环节的训练、考核和互动调节,促进学习目标的达成: (1)习题作业 (2)随堂测试 (3)小组讨论 (4)课程报告 (5)期中考试(以课程前半学期的学习内容作为考核内容) (6)期末考试(以课程后半学期的学习内容为主) 4.成绩评定 平时 期中考试 期末考试 10% 40% 50% 八、课程目标对毕业要求的支撑
课程目标 毕业要求 12345 毕业要求1:工程知识 指标点1.3:能够利用传感器、电路电子技术、嵌入式系统、测量 理论与控制技术等专业基础知识,实现复杂测控系统中的功能模 块设计 4 H 毕业要求2:问题分析 指标点21:能够应用自然科学和工程科学的基本原理,对复杂工 程问题中的测量控制和仪器系统问题进行识别和原理分析: 毕业要求2:问题分析 H H 指标点2.2:能够应用数学知识和自然科学、工程科学的基本理论 对复杂工程问题进行准确描述,建立数学模型并求解分析: 九、课程目标达成评价 达成目标值分配 课程目标 平时 期中考试 期末考试 1 0.5 0.5 2 0.2 04 0.4 06 04 4 0.5 0.5 0.6 0.4 毕业要求 达成目标值分配 设计作业 期中考试 期末考试 指标点13 04 0.3 0.3 指标点2.1 0.2 0.4 0.4 指标点2.2 0.2 0.5 0.3 课程目标的实际达成效果计算方式如下,达成值越高,教学效果越好
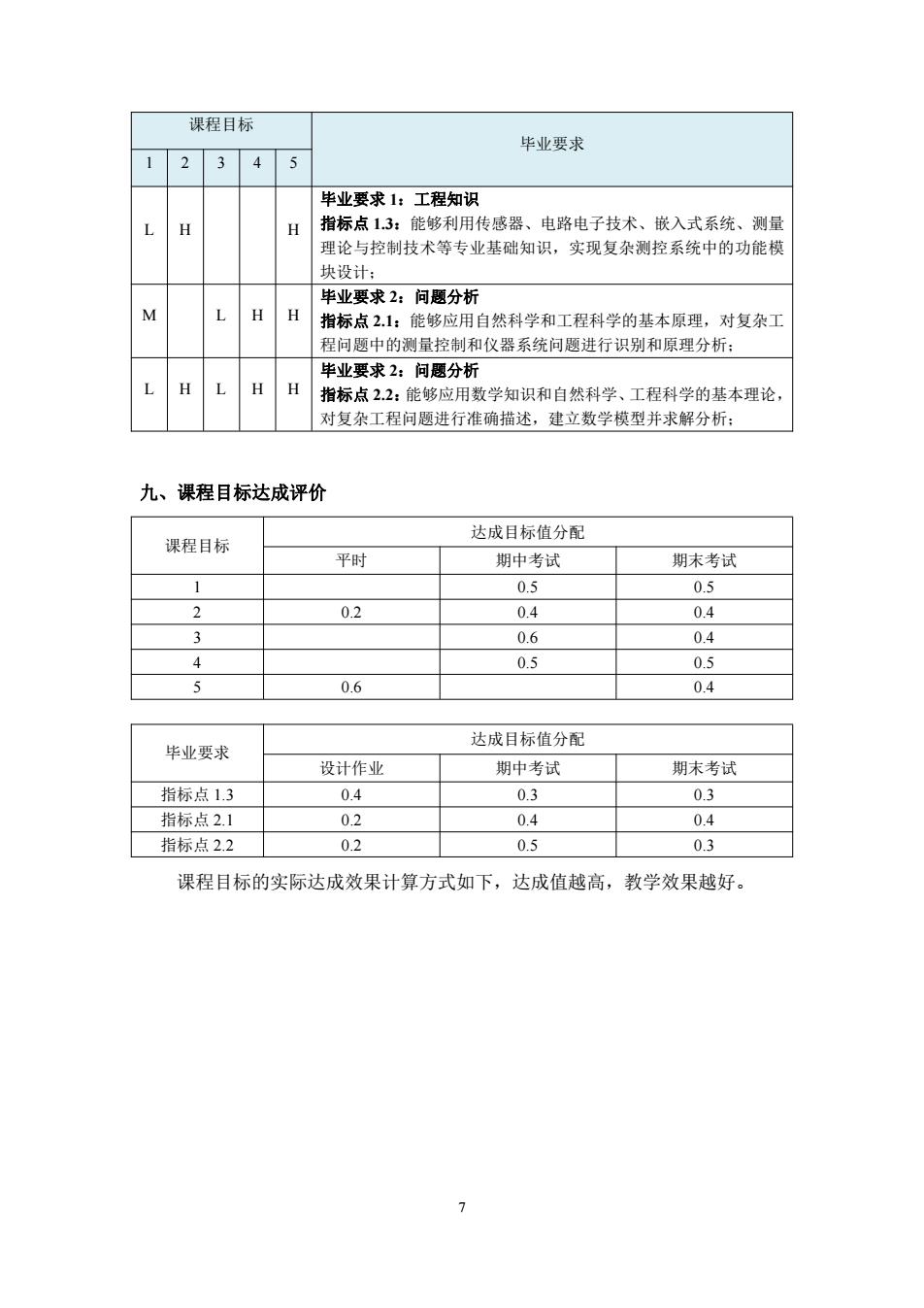
7 课程目标 毕业要求 1 2 3 4 5 L H H 毕业要求 1:工程知识 指标点 1.3:能够利用传感器、电路电子技术、嵌入式系统、测量 理论与控制技术等专业基础知识,实现复杂测控系统中的功能模 块设计; M L H H 毕业要求 2:问题分析 指标点 2.1:能够应用自然科学和工程科学的基本原理,对复杂工 程问题中的测量控制和仪器系统问题进行识别和原理分析; L H L H H 毕业要求 2:问题分析 指标点 2.2:能够应用数学知识和自然科学、工程科学的基本理论, 对复杂工程问题进行准确描述,建立数学模型并求解分析; 九、课程目标达成评价 课程目标 达成目标值分配 平时 期中考试 期末考试 1 0.5 0.5 2 0.2 0.4 0.4 3 0.6 0.4 4 0.5 0.5 5 0.6 0.4 毕业要求 达成目标值分配 设计作业 期中考试 期末考试 指标点 1.3 0.4 0.3 0.3 指标点 2.1 0.2 0.4 0.4 指标点 2.2 0.2 0.5 0.3 课程目标的实际达成效果计算方式如下,达成值越高,教学效果越好

十、教学进程 课堂讲授 作A 周 其它 题目名称和内容 学 题目名称学题目名称 次 题目名称 时和内容时和内容 时和内容 时 第一章绪论(2学时) 第二章连续控制系统的机 理建模(10学时) 2.1概述 22控制系统的微分方程描 述 2 23控制系统的方框图和传 递函数 2.3控制系统的方框图和传 递函数 32.4控制系统的状态空间描 4 述 25各种模型间的转 第三章控制系统的稳定性 (8学时) 4 3.1稳定性的概念 32系统格定性的倒定 53.2系统稳定性的判定 第四章连续控制系统的时 域分析(8学时) 641典型输入信号及动态性 能指标 阶系统的动态分析 7 4.4高阶系统及二阶近似 45控制系统的稳态误差 第五意师率特性法10学 时 5.1频率特性和频率特性法 4 52基本环节的频率特性 53频率特性指标 5.4开环频率特性的系统的 分析方法 5.5控制系统的频率特性法 校正 5.5控制系统的频率特性法 校正 10第六章根轨迹法(4学时) 6.1基本概念 6.2绘制根轨迹图的基本规
8 十、教学进程 周 次 课堂讲授 实践实验 作业测验 其它 题目名称和内容 学 时 题目名称 和内容 学 时 题目名称 和内容 学 时 题目名称 和内容 学 时 1 第一章 绪论(2 学时) 第二章 连续控制系统的机 理建模(10 学时) 2.1 概述 2.2 控制系统的微分方程描 述 4 2 2.3 控制系统的方框图和传 递函数 4 3 2.3 控制系统的方框图和传 递函数 2.4 控制系统的状态空间描 述 2.5 各种模型间的转换 4 4 第三章 控制系统的稳定性 (8 学时) 3.1 稳定性的概念 3.2 系统稳定性的判定 4 5 3.2 系统稳定性的判定 4 6 第四章 连续控制系统的时 域分析(8 学时) 4.1 典型输入信号及动态性 能指标 4.3 二阶系统的动态分析 4 7 4.4 高阶系统及二阶近似 4.5 控制系统的稳态误差 4 8 第五章 频率特性法(10 学 时) 5.1 频率特性和频率特性法 5.2 基本环节的频率特性 5.3 频率特性指标 4 9 5.4 开环频率特性的系统的 分析方法 5.5 控制系统的频率特性法 校正 4 10 5.5 控制系统的频率特性法 校正 第六章 根轨迹法(4 学时) 6.1 基本概念 6.2 绘制根轨迹图的基本规 4

则 63根轨迹图的制作 65开环零极点对根轨迹的 6.6利用根轨迹法进行系统 性能分析 67利用根轨济法校正 11 第七章连续域现代控制理 4 论基础(2学时) 7.1线性定常系统状态方程 的解 72控制系统的可控性与可 观性 章线性离散控制系 统数学描述与分析(4学时) 111概述 112线性差分方程 113脉冲响应与线性卷积 12 114脉冲传递函数 4 115离散状态空间描述 116连续系统状态方程的 离散化 117线性离散系统的稳定 性分析 第十二章离散控制系统的 经典法设计(4学时) 12.1概述 12.2控制系统的离散化方 13123PD控制器及其算式 12.4具有史密斯纯滞后补 偿的PID控制器 12.5大林算法 12.6数字PD控制器的参 数整定 第十四章状态空间分析和 设计 141离散控制系统的可控 14性和可观性 142离散控制系统状态反馈 极点配置设计 14.3观测器的设计 第十五章离散最优控制系 15 统(2学时)
9 则 6.3 根轨迹图的制作 11 6.5 开环零极点对根轨迹的 影响 6.6 利用根轨迹法进行系统 性能分析 6.7 利用根轨迹法校正 第七章 连续域现代控制理 论基础(2 学时) 7.1 线性定常系统状态方程 的解 7.2 控制系统的可控性与可 观性 4 12 第十一章 线性离散控制系 统数学描述与分析(4 学时) 11.1 概述 11.2 线性差分方程 11.3 脉冲响应与线性卷积 11.4 脉冲传递函数 11.5 离散状态空间描述 11.6 连续系统状态方程的 离散化 11.7 线性离散系统的稳定 性分析 4 13 第十二章 离散控制系统的 经典法设计(4 学时) 12.1 概述 12.2 控制系统的离散化方 法 12.3 PID 控制器及其算式 12.4 具有史密斯纯滞后补 偿的 PID 控制器 12.5 大林算法 12.6 数字 PID 控制器的参 数整定 4 14 第十四章 状态空间分析和 设计 14.1 离散控制系统的可控 性和可观性 14.2 离散控制系统状态反馈 极点配置设计 14.3 观测器的设计 4 15 第十五章 离散最优控制系 统(2 学时) 4
15.1概述 15.2离散二次型最优控制 的性能指标 15.3离散二次型最优控制 的设计 第十六章系统辨识(2学 时) 16.1被控对象的建模 16.2最小二乘法参数估计 第十七章离散控制系统采 样周期的选择(2学时) 16 171概述 172影响采样的主要因素 4 17.3采样周期的选取方法 复习 17考试 10
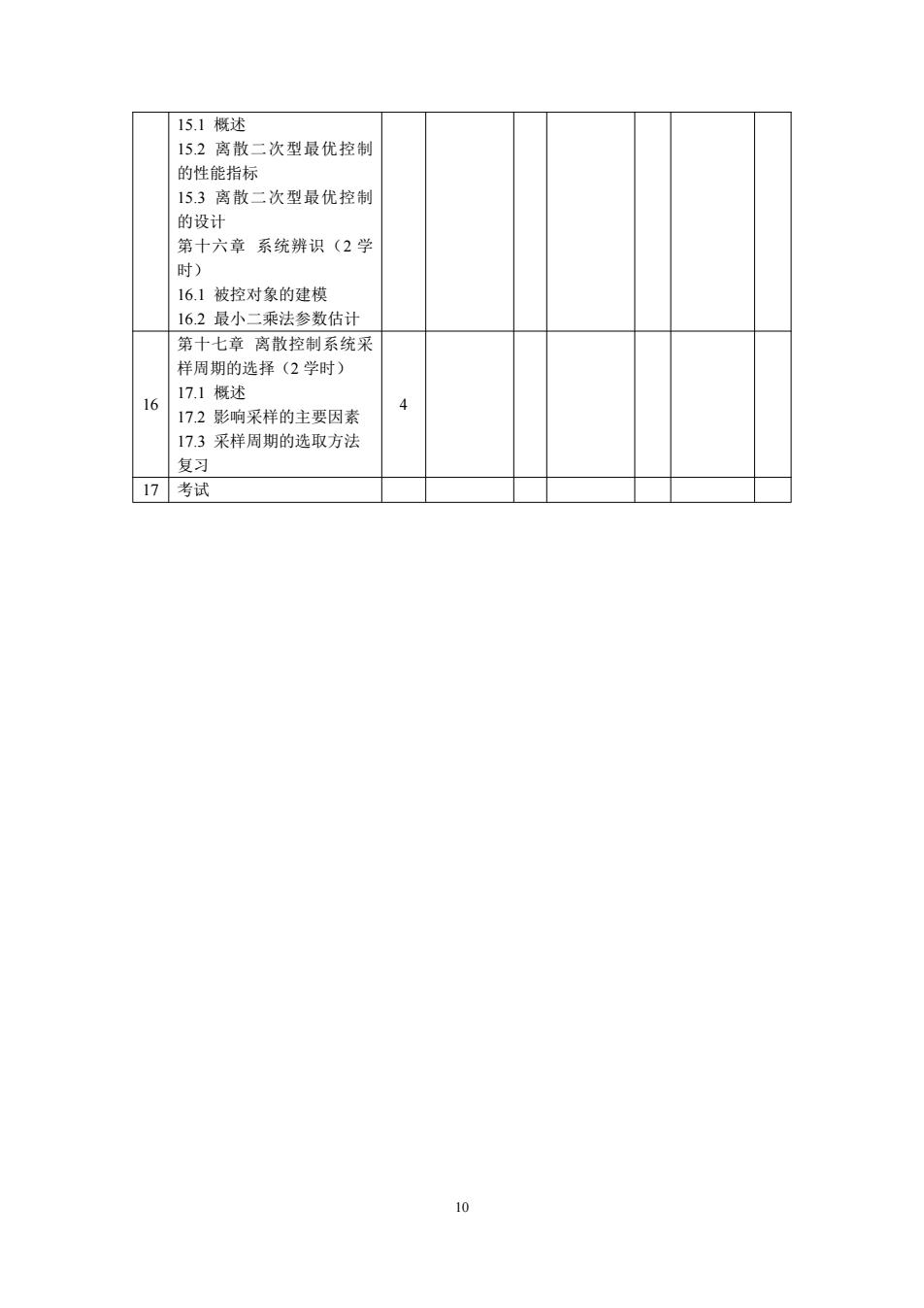
10 15.1 概述 15.2 离散二次型最优控制 的性能指标 15.3 离散二次型最优控制 的设计 第十六章 系统辨识(2 学 时) 16.1 被控对象的建模 16.2 最小二乘法参数估计 16 第十七章 离散控制系统采 样周期的选择(2 学时) 17.1 概述 17.2 影响采样的主要因素 17.3 采样周期的选取方法 复习 4 17 考试