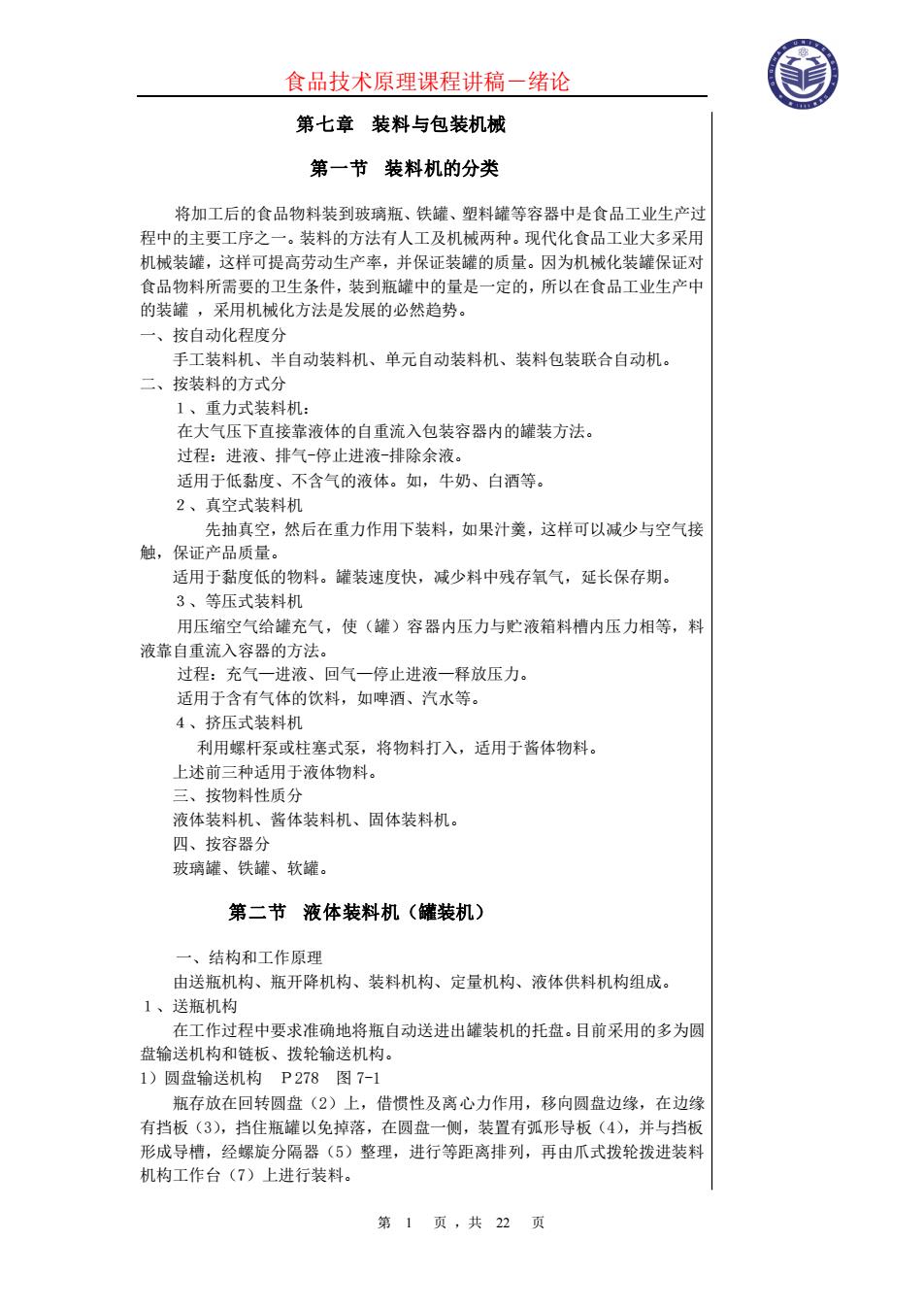
食品技术原理课程讲稿-绪论 第 1 页 ,共 22 页 第七章 装料与包装机械 第一节 装料机的分类 将加工后的食品物料装到玻璃瓶、铁罐、塑料罐等容器中是食品工业生产过 程中的主要工序之一。装料的方法有人工及机械两种。现代化食品工业大多采用 机械装罐,这样可提高劳动生产率,并保证装罐的质量。因为机械化装罐保证对 食品物料所需要的卫生条件,装到瓶罐中的量是一定的,所以在食品工业生产中 的装罐 ,采用机械化方法是发展的必然趋势。 一、按自动化程度分 手工装料机、半自动装料机、单元自动装料机、装料包装联合自动机。 二、按装料的方式分 1、重力式装料机: 在大气压下直接靠液体的自重流入包装容器内的罐装方法。 过程:进液、排气-停止进液-排除余液。 适用于低黏度、不含气的液体。如,牛奶、白酒等。 2、真空式装料机 先抽真空,然后在重力作用下装料,如果汁羹,这样可以减少与空气接 触,保证产品质量。 适用于黏度低的物料。罐装速度快,减少料中残存氧气,延长保存期。 3、等压式装料机 用压缩空气给罐充气,使(罐)容器内压力与贮液箱料槽内压力相等,料 液靠自重流入容器的方法。 过程:充气—进液、回气—停止进液—释放压力。 适用于含有气体的饮料,如啤酒、汽水等。 4、挤压式装料机 利用螺杆泵或柱塞式泵,将物料打入,适用于酱体物料。 上述前三种适用于液体物料。 三、按物料性质分 液体装料机、酱体装料机、固体装料机。 四、按容器分 玻璃罐、铁罐、软罐。 第二节 液体装料机(罐装机) 一、结构和工作原理 由送瓶机构、瓶开降机构、装料机构、定量机构、液体供料机构组成。 1、送瓶机构 在工作过程中要求准确地将瓶自动送进出罐装机的托盘。目前采用的多为圆 盘输送机构和链板、拨轮输送机构。 1)圆盘输送机构 P278 图 7-1 瓶存放在回转圆盘(2)上,借惯性及离心力作用,移向圆盘边缘,在边缘 有挡板(3),挡住瓶罐以免掉落,在圆盘一侧,装置有弧形导板(4),并与挡板 形成导槽,经螺旋分隔器(5)整理,进行等距离排列,再由爪式拨轮拨进装料 机构工作台(7)上进行装料
食品技术原理课程讲稿-绪论 第 1 页 ,共 22 页 第七章 装料与包装机械 第一节 装料机的分类 将加工后的食品物料装到玻璃瓶、铁罐、塑料罐等容器中是食品工业生产过 程中的主要工序之一。装料的方法有人工及机械两种。现代化食品工业大多采用 机械装罐,这样可提高劳动生产率,并保证装罐的质量。因为机械化装罐保证对 食品物料所需要的卫生条件,装到瓶罐中的量是一定的,所以在食品工业生产中 的装罐 ,采用机械化方法是发展的必然趋势。 一、按自动化程度分 手工装料机、半自动装料机、单元自动装料机、装料包装联合自动机。 二、按装料的方式分 1、重力式装料机: 在大气压下直接靠液体的自重流入包装容器内的罐装方法。 过程:进液、排气-停止进液-排除余液。 适用于低黏度、不含气的液体。如,牛奶、白酒等。 2、真空式装料机 先抽真空,然后在重力作用下装料,如果汁羹,这样可以减少与空气接 触,保证产品质量。 适用于黏度低的物料。罐装速度快,减少料中残存氧气,延长保存期。 3、等压式装料机 用压缩空气给罐充气,使(罐)容器内压力与贮液箱料槽内压力相等,料 液靠自重流入容器的方法。 过程:充气—进液、回气—停止进液—释放压力。 适用于含有气体的饮料,如啤酒、汽水等。 4、挤压式装料机 利用螺杆泵或柱塞式泵,将物料打入,适用于酱体物料。 上述前三种适用于液体物料。 三、按物料性质分 液体装料机、酱体装料机、固体装料机。 四、按容器分 玻璃罐、铁罐、软罐。 第二节 液体装料机(罐装机) 一、结构和工作原理 由送瓶机构、瓶开降机构、装料机构、定量机构、液体供料机构组成。 1、送瓶机构 在工作过程中要求准确地将瓶自动送进出罐装机的托盘。目前采用的多为圆 盘输送机构和链板、拨轮输送机构。 1)圆盘输送机构 P278 图 7-1 瓶存放在回转圆盘(2)上,借惯性及离心力作用,移向圆盘边缘,在边缘 有挡板(3),挡住瓶罐以免掉落,在圆盘一侧,装置有弧形导板(4),并与挡板 形成导槽,经螺旋分隔器(5)整理,进行等距离排列,再由爪式拨轮拨进装料 机构工作台(7)上进行装料
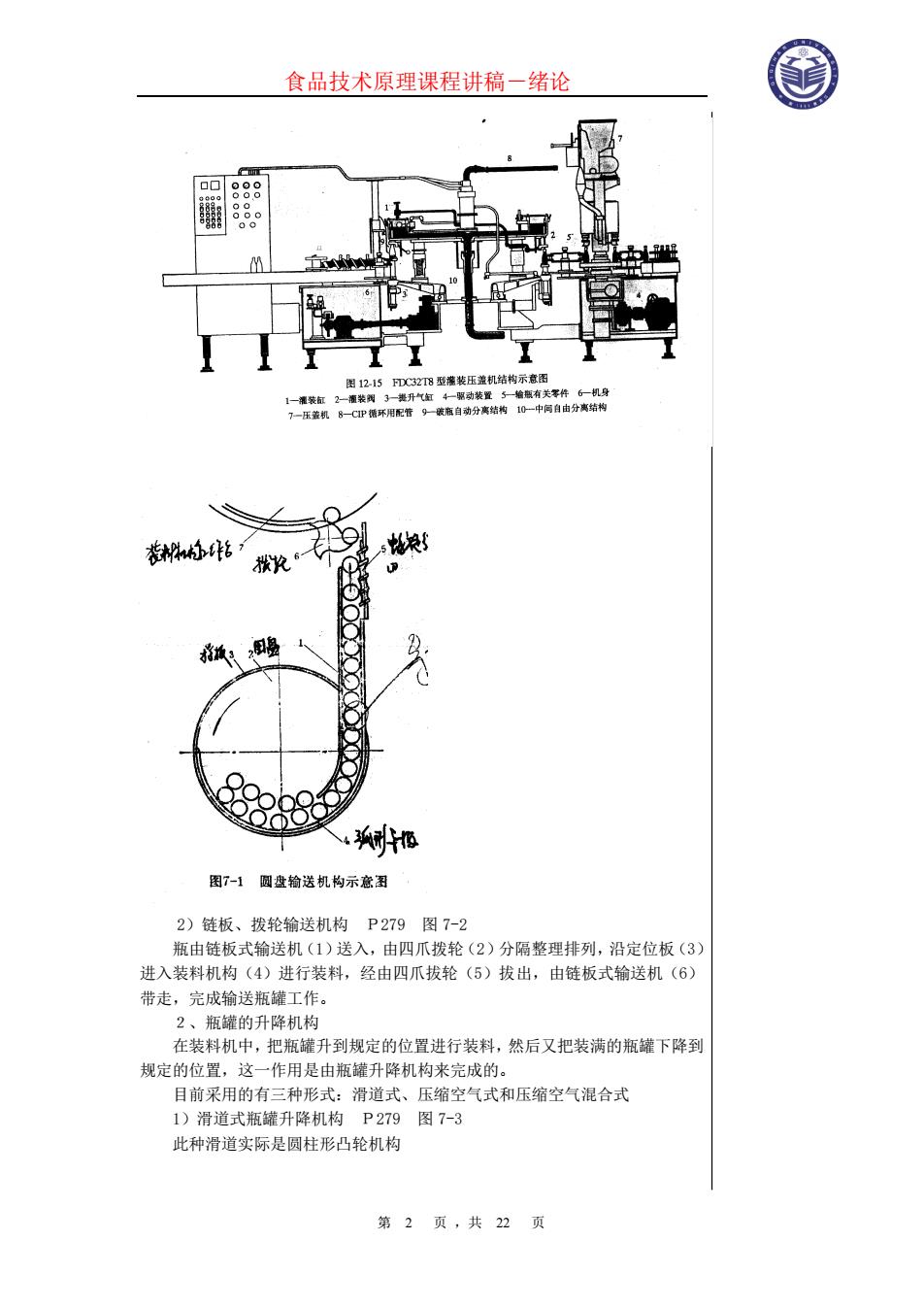
食品技术原理课程讲稿-绪论 第 2 页 ,共 22 页 2)链板、拨轮输送机构 P279 图 7-2 瓶由链板式输送机(1)送入,由四爪拨轮(2)分隔整理排列,沿定位板(3) 进入装料机构(4)进行装料,经由四爪拔轮(5)拔出,由链板式输送机(6) 带走,完成输送瓶罐工作。 2、瓶罐的升降机构 在装料机中,把瓶罐升到规定的位置进行装料,然后又把装满的瓶罐下降到 规定的位置,这一作用是由瓶罐升降机构来完成的。 目前采用的有三种形式:滑道式、压缩空气式和压缩空气混合式 1)滑道式瓶罐升降机构 P279 图 7-3 此种滑道实际是圆柱形凸轮机构
食品技术原理课程讲稿-绪论 第 2 页 ,共 22 页 2)链板、拨轮输送机构 P279 图 7-2 瓶由链板式输送机(1)送入,由四爪拨轮(2)分隔整理排列,沿定位板(3) 进入装料机构(4)进行装料,经由四爪拔轮(5)拔出,由链板式输送机(6) 带走,完成输送瓶罐工作。 2、瓶罐的升降机构 在装料机中,把瓶罐升到规定的位置进行装料,然后又把装满的瓶罐下降到 规定的位置,这一作用是由瓶罐升降机构来完成的。 目前采用的有三种形式:滑道式、压缩空气式和压缩空气混合式 1)滑道式瓶罐升降机构 P279 图 7-3 此种滑道实际是圆柱形凸轮机构
食品技术原理课程讲稿-绪论 第 3 页 ,共 22 页 瓶罐行程的最高点,必须保证待罐瓶嘴能紧压在罐装头上,其最低点应使瓶嘴离 开罐装头,并便于退出瓶罐机构,凸轮升角α≤30o,(因为避免凸轮机构中的作 用力过大,又能使凸轮的尺寸在许可的范围内)。凸轮机构的空行程--瓶托下 降时,凸轮的升角β≤700。(因为从动件速度提高,以节省时间)。长度L根据 整理时间所需要而定其长短。 瓶罐行程的最高点,必须保证待罐瓶嘴能紧压在罐装头上,其最低点应使瓶嘴离 开罐装头,并便于退出瓶罐机构,凸轮升角α≤30o,(因为避免凸轮机构中的作 用力过大,又能使凸轮的尺寸在许可的范围内)。凸轮机构的空行程--瓶托下 降时,凸轮的升角β≤700。(因为从动件速度提高,以节省时间)。长度L根据 整理时间所需要而定其长短
食品技术原理课程讲稿-绪论 第 3 页 ,共 22 页 瓶罐行程的最高点,必须保证待罐瓶嘴能紧压在罐装头上,其最低点应使瓶嘴离 开罐装头,并便于退出瓶罐机构,凸轮升角α≤30o,(因为避免凸轮机构中的作 用力过大,又能使凸轮的尺寸在许可的范围内)。凸轮机构的空行程--瓶托下 降时,凸轮的升角β≤700。(因为从动件速度提高,以节省时间)。长度L根据 整理时间所需要而定其长短。 瓶罐行程的最高点,必须保证待罐瓶嘴能紧压在罐装头上,其最低点应使瓶嘴离 开罐装头,并便于退出瓶罐机构,凸轮升角α≤30o,(因为避免凸轮机构中的作 用力过大,又能使凸轮的尺寸在许可的范围内)。凸轮机构的空行程--瓶托下 降时,凸轮的升角β≤700。(因为从动件速度提高,以节省时间)。长度L根据 整理时间所需要而定其长短
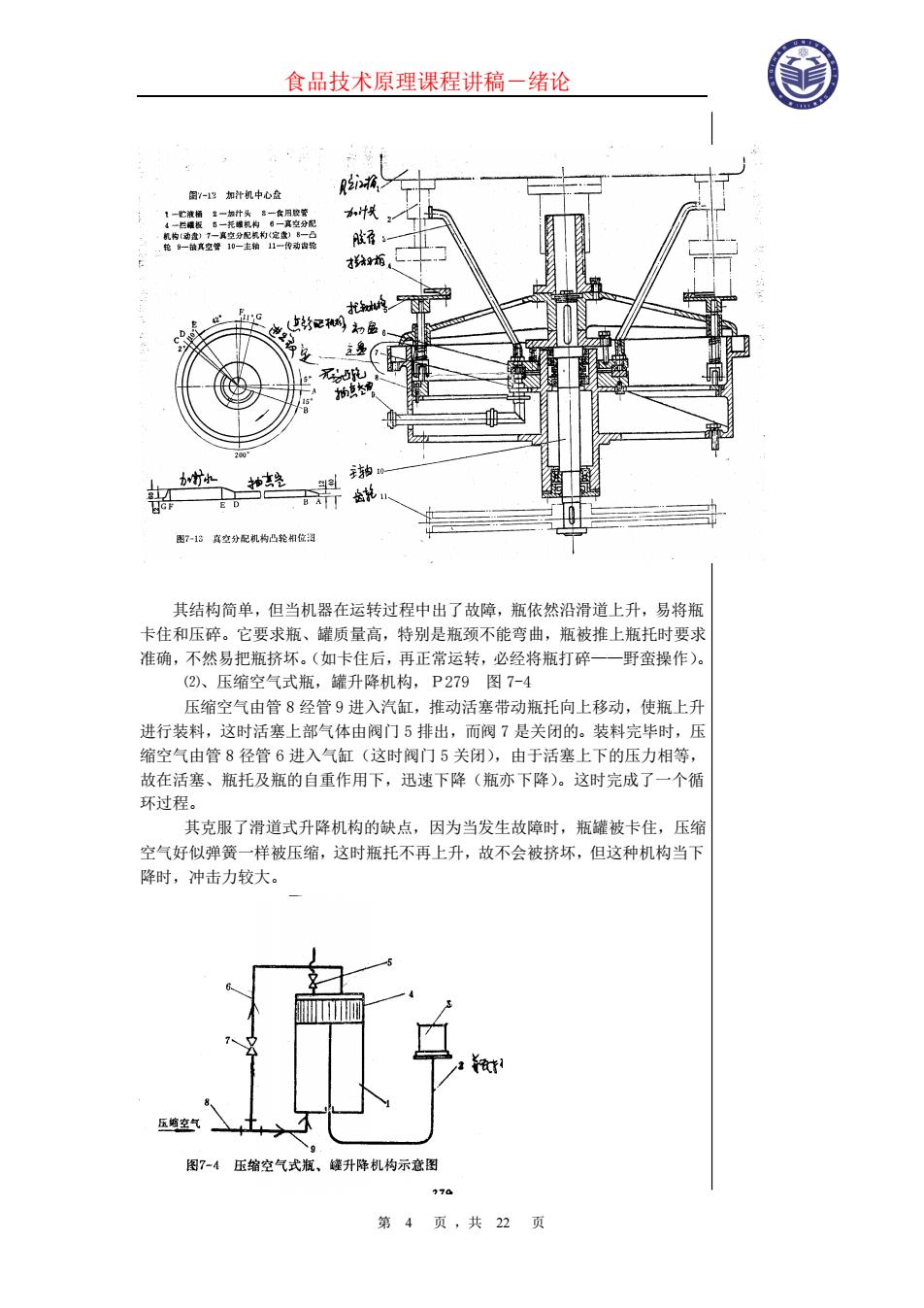
食品技术原理课程讲稿-绪论 第 4 页 ,共 22 页 其结构简单,但当机器在运转过程中出了故障,瓶依然沿滑道上升,易将瓶 卡住和压碎。它要求瓶、罐质量高,特别是瓶颈不能弯曲,瓶被推上瓶托时要求 准确,不然易把瓶挤坏。(如卡住后,再正常运转,必经将瓶打碎——野蛮操作)。 ⑵、压缩空气式瓶,罐升降机构,P279 图 7-4 压缩空气由管 8 经管 9 进入汽缸,推动活塞带动瓶托向上移动,使瓶上升 进行装料,这时活塞上部气体由阀门 5 排出,而阀 7 是关闭的。装料完毕时,压 缩空气由管 8 径管 6 进入气缸(这时阀门 5 关闭),由于活塞上下的压力相等, 故在活塞、瓶托及瓶的自重作用下,迅速下降(瓶亦下降)。这时完成了一个循 环过程。 其克服了滑道式升降机构的缺点,因为当发生故障时,瓶罐被卡住,压缩 空气好似弹簧一样被压缩,这时瓶托不再上升,故不会被挤坏,但这种机构当下 降时,冲击力较大
食品技术原理课程讲稿-绪论 第 4 页 ,共 22 页 其结构简单,但当机器在运转过程中出了故障,瓶依然沿滑道上升,易将瓶 卡住和压碎。它要求瓶、罐质量高,特别是瓶颈不能弯曲,瓶被推上瓶托时要求 准确,不然易把瓶挤坏。(如卡住后,再正常运转,必经将瓶打碎——野蛮操作)。 ⑵、压缩空气式瓶,罐升降机构,P279 图 7-4 压缩空气由管 8 经管 9 进入汽缸,推动活塞带动瓶托向上移动,使瓶上升 进行装料,这时活塞上部气体由阀门 5 排出,而阀 7 是关闭的。装料完毕时,压 缩空气由管 8 径管 6 进入气缸(这时阀门 5 关闭),由于活塞上下的压力相等, 故在活塞、瓶托及瓶的自重作用下,迅速下降(瓶亦下降)。这时完成了一个循 环过程。 其克服了滑道式升降机构的缺点,因为当发生故障时,瓶罐被卡住,压缩 空气好似弹簧一样被压缩,这时瓶托不再上升,故不会被挤坏,但这种机构当下 降时,冲击力较大
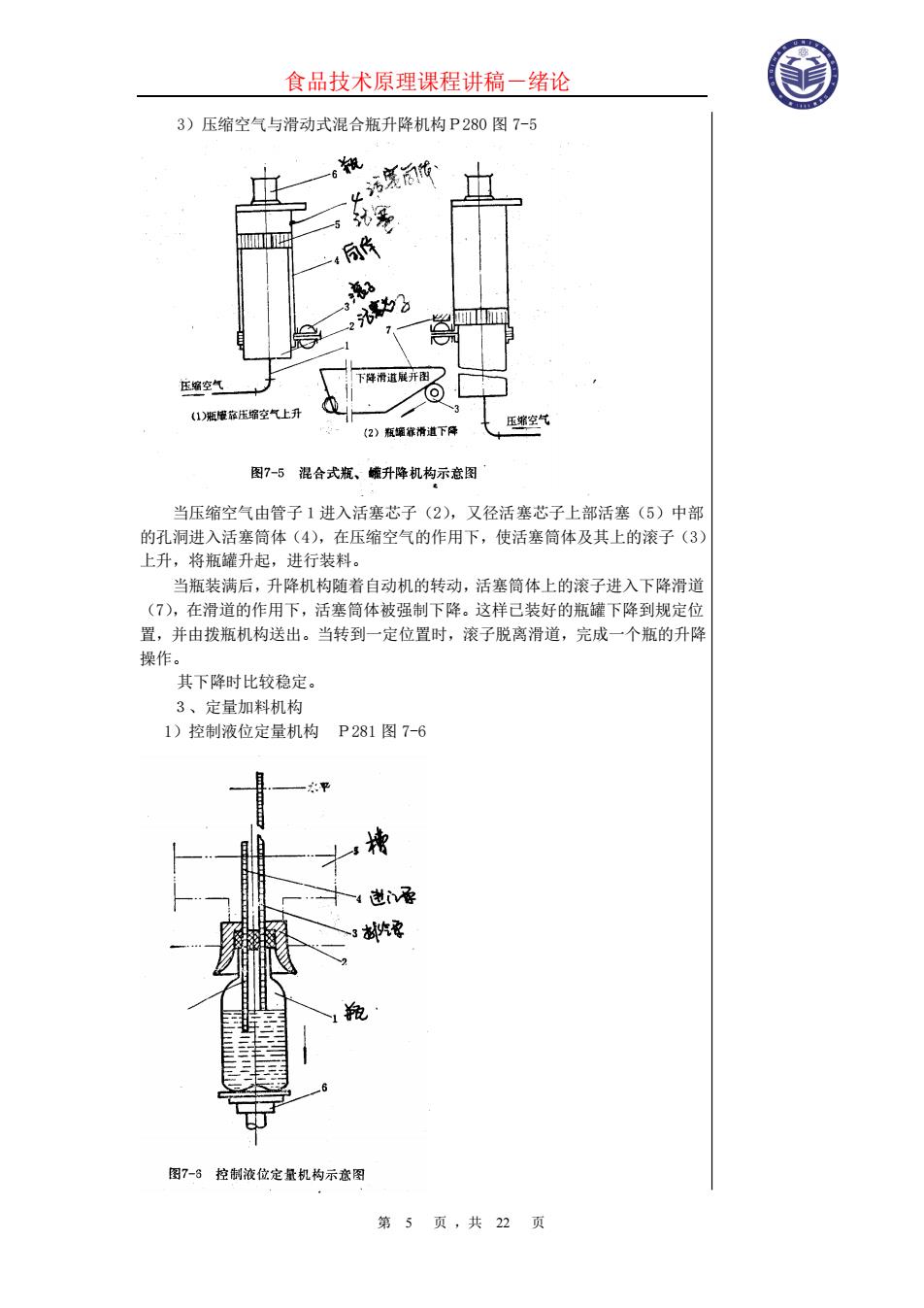
食品技术原理课程讲稿-绪论 第 5 页 ,共 22 页 3)压缩空气与滑动式混合瓶升降机构P280 图 7-5 当压缩空气由管子1进入活塞芯子(2),又径活塞芯子上部活塞(5)中部 的孔洞进入活塞筒体(4),在压缩空气的作用下,使活塞筒体及其上的滚子(3) 上升,将瓶罐升起,进行装料。 当瓶装满后,升降机构随着自动机的转动,活塞筒体上的滚子进入下降滑道 (7),在滑道的作用下,活塞筒体被强制下降。这样已装好的瓶罐下降到规定位 置,并由拨瓶机构送出。当转到一定位置时,滚子脱离滑道,完成一个瓶的升降 操作。 其下降时比较稳定。 3、定量加料机构 1)控制液位定量机构 P281 图 7-6
食品技术原理课程讲稿-绪论 第 5 页 ,共 22 页 3)压缩空气与滑动式混合瓶升降机构P280 图 7-5 当压缩空气由管子1进入活塞芯子(2),又径活塞芯子上部活塞(5)中部 的孔洞进入活塞筒体(4),在压缩空气的作用下,使活塞筒体及其上的滚子(3) 上升,将瓶罐升起,进行装料。 当瓶装满后,升降机构随着自动机的转动,活塞筒体上的滚子进入下降滑道 (7),在滑道的作用下,活塞筒体被强制下降。这样已装好的瓶罐下降到规定位 置,并由拨瓶机构送出。当转到一定位置时,滚子脱离滑道,完成一个瓶的升降 操作。 其下降时比较稳定。 3、定量加料机构 1)控制液位定量机构 P281 图 7-6