直流伺服电机模型 直流同服电机最常用的控制方式是电枢控制,即励滋绕 组加恒定动兹电压,电枢绕组加控制电压,当负载转矩恒定 时,电枢的控制电压升高,电动机的转速就升高;反之,减 小电枢控制电压,电动机的转速就降低;改变控制电压的极 性,电机就反转:控制电压为零,电机就停转,故可实现对 被控对象的机械运动的快速控制。 e=常量 LEEE2EL20152221257 图1.10直流伺服电机结构图
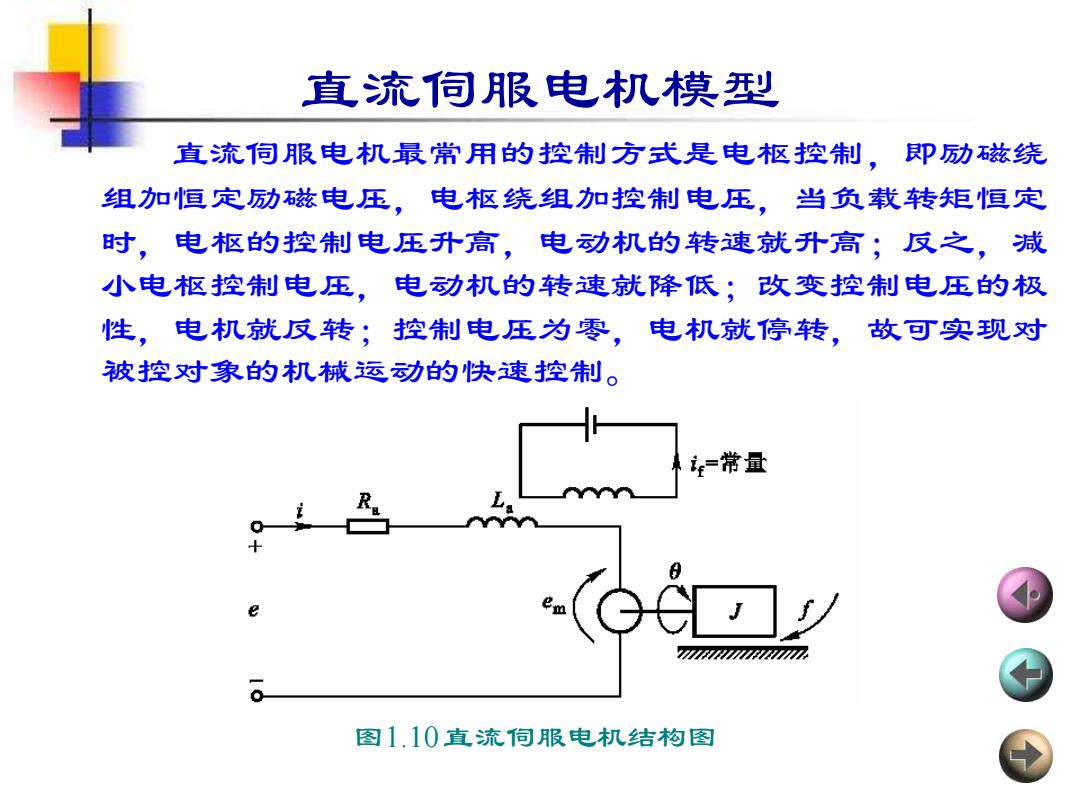
直流伺服电机模型 直流伺服电机最常用的控制方式是电枢控制,即励磁绕 组加恒定励磁电压,电枢绕组加控制电压,当负载转矩恒定 时,电枢的控制电压升高,电动机的转速就升高;反之,减 小电枢控制电压,电动机的转速就降低;改变控制电压的极 性,电机就反转;控制电压为零,电机就停转,故可实现对 被控对象的机械运动的快速控制。 图1.10直流伺服电机结构图
工业机器人模型 工业机器人被广泛应用于工业过程控制,成为制造 业生产自动化中非常重要的机电一体化设备。 连杆2 关节2 连杆1 关节1 关节3 连杆0 连杆3 连杆4 关节4一 关节5 十 连杆6 关节6 图1.11工业机器人结构示意图
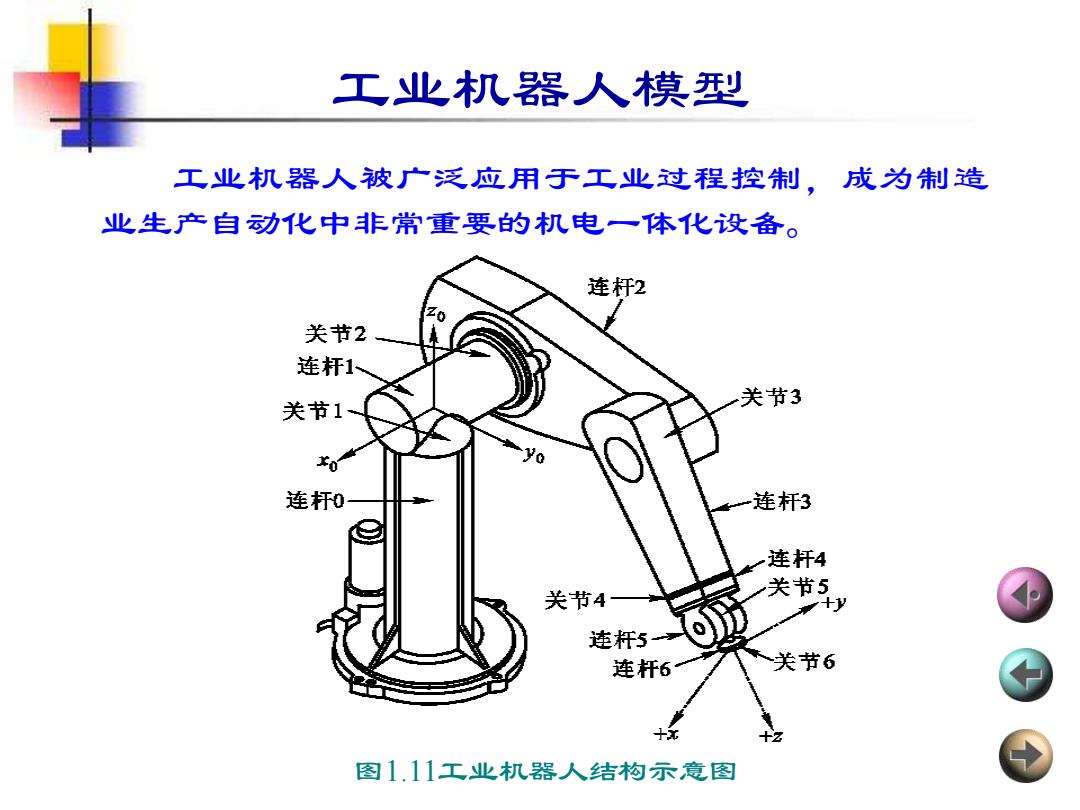
工业机器人模型 工业机器人被广泛应用于工业过程控制,成为制造 业生产自动化中非常重要的机电一体化设备。 图1.11工业机器人结构示意图