第三篇航海仪器 .2 第一章现代电子定位仪器 第一节罗兰C导航系统 第二节 GPS卫星导航系统 第三节 船舶自动识别系统(S).16 第二章雷达定位与导航.23 第一节雷达影象的特点. 第二节雷达定位与导航 第三节雷法佳用性能和度 30 第三 回声测深仪 0。”g。gt。9tt。gtt。5t。”g。tt。”。t”。 32 第-节水声学基础.32 第二节回声测深仪.33 第四章船用计程仪.。 ,.39 第一共啊术 30 第二节电磁计程仪 30 第三节 41 第四节声相关计程仪.44 第五章磁罗经. .47 第一节地磁及船用磁罗经。 第二节磁罗经自差, .47 第三节 自差校正.5科 第六章陀螺罗经.。 第一节陀螺罗经指北原理.60 第二节陀螺罗经误差及其消除 第二节安许系列罗经 78 第四节 斯伯利系列罗经. 0 第五节阿玛一勃朗系列罗经.8
第三篇 航海仪器. 2 第一章 现代电子定位仪器 .2 第一节 罗兰C导航系统. 2 第二节 GPS卫星导航系统. 5 第三节 船舶自动识别系统(AIS). 16 第二章 雷达定位与导航 .23 第一节 雷达影象的特点. 23 第二节 雷达定位与导航. 27 第三节 雷达使用性能和精度. 30 第三章 回声测深仪 .32 第一节 水声学基础. 32 第二节 回声测深仪. 33 第四章 船用计程仪 .39 第一节 概述. 39 第二节 电磁计程仪. 39 第三节 多普勒计程仪. 41 第四节 声相关计程仪. 44 第五章 磁罗经 .47 第一节 地磁及船用磁罗经. 47 第二节 磁罗经自差. 52 第三节 自差校正. 54 第六章 陀螺罗经 .60 第一节 陀螺罗经指北原理. 60 第二节 陀螺罗经误差及其消除. 72 第三节 安许茨系列罗经. 78 第四节 斯伯利系列罗经. 80 第五节 阿玛一勃朗系列罗经. 82
第三篇 航海仪器 第一章 现代电子定位仪器 第一节罗兰C导航系统 第二次世界 种类型,现在商船上主要使用C类型。 罗兰C是一种远程、低频、脉冲一相位测距差式双曲线导航系统,是在罗兰A基础上 发展起来的。它是通过测量主、副台脉冲包络的时间间隔粗测时间差,再通过比较载波相位 精测时间差的工作方式,提高了测量精度。该系统采用1O0k低频、长基线,并采用多脉 冲相位编码、相关接收等技术。 它的作用距离可达 000 白天地波的作用器 离为1200 nmile,最佳定位精度可达儿十米:夜间天被的作用距离为2300 nmile,定位精度可 达几百米数量级。目前世界上有20多个台链、约75个罗兰C发射台。 一、系统设置 1台结组成 罗兰C由1个主台和2一4个副台组成一个台链, 并用M表示主台,用W、X、Y、Z 分别按顺序命名各副台。为了获得较好的位置线夹角,主、副台的地理位置通常配置成如图 3-1所示。主剧台间的基线长 约为800 n mile。 a) 2信号发射格式 罗兰C导航系统只有 一种发射频率。台链叶 各合都采用同一脉冲重复周期 发射信号,主台先发射,然后 各刷台按W、Z、Y、Z的顺序 依次发射。其信号发射格式为 1)多脉冲发射 每个发身 台都发射8个为一组的脉冲信 号,其脉冲宽度为200μs,相 邻脉冲的间隔为1000us。主台 除发射一组8个脉冲外,还发 图3-1-1罗兰C主副台配置图 射第9个脉冲,它与第8个脉 冲的间隔为2000s或500us,其主要用于视觉识别主台信号,故称为识别脉冲 2)相位编码。罗兰C发射台发射的脉神组中,8个信号脉冲的载波初相位按一定规律变 化的现象称为相位编码。每一脉冲载波的初始相位只有两种状态:0相和π相,或以“+“和 来表示。主台和副台信号相位编码不同(各剧台的相位编码相同),相邻两周期信号的相位编 码也不同,但主台的第9个脉冲不参加编码。罗兰C采用的相位编码序列如表3-3-1所示 从表中可以看出, 、刷台的各奇数脉冲在两个相邻脉冲组重复周期中相位不变,称为原码 主、副台的偶数脉冲在两个相邻脉冲组重复周期中相位相反,即互为补码。利用相位编码
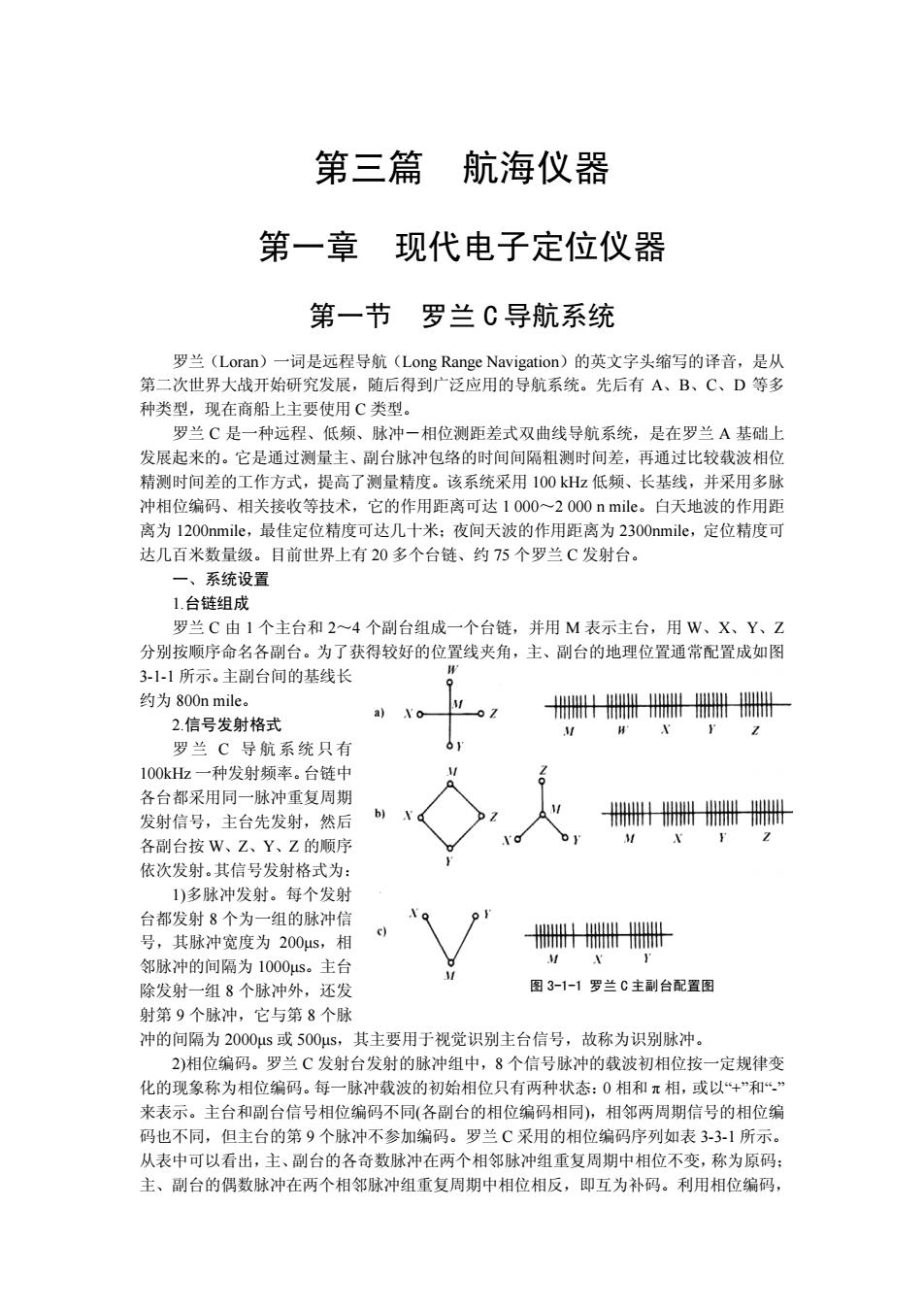
第三篇 航海仪器 第一章 现代电子定位仪器 第一节 罗兰 C 导航系统 罗兰(Loran)一词是远程导航(Long Range Navigation)的英文字头缩写的译音,是从 第二次世界大战开始研究发展,随后得到广泛应用的导航系统。先后有 A、B、C、D 等多 种类型,现在商船上主要使用 C 类型。 罗兰 C 是一种远程、低频、脉冲-相位测距差式双曲线导航系统,是在罗兰 A 基础上 发展起来的。它是通过测量主、副台脉冲包络的时间间隔粗测时间差,再通过比较载波相位 精测时间差的工作方式,提高了测量精度。该系统采用 100 kHz 低频、长基线,并采用多脉 冲相位编码、相关接收等技术,它的作用距离可达 1 000~2 000 n mile。白天地波的作用距 离为 1200nmile,最佳定位精度可达几十米;夜间天波的作用距离为 2300nmile,定位精度可 达几百米数量级。目前世界上有 20 多个台链、约 75 个罗兰 C 发射台。 一、系统设置 1.台链组成 罗兰 C 由 1 个主台和 2~4 个副台组成一个台链,并用 M 表示主台,用 W、X、Y、Z 分别按顺序命名各副台。为了获 3-1-1 所示。主副台间的基线长 约为 800n mile。 2.信号发射格式 罗 兰 C 导航系统 得较好的位置线夹角,主、副台的地理位置通常配置成如图 只 有 。台链中 脉冲宽度为 200μs,相 定规律变 100kHz 一种发射频率 各台都采用同一脉冲重复周期 发射信号,主台先发射,然后 各副台按 W、Z、Y、Z 的顺序 依次发射。其信号发射格式为: 1)多脉冲发射。每个发射 台都发射 8 个为一组的脉冲信 号,其 邻脉冲的间隔为 1000μs。主台 除发射一组 8 个脉冲外,还发 射第 9 个脉冲,它与第 8 个脉 冲的间隔为 2000μs 或 500μs,其主要用于视觉识别主台信号,故称为识别脉冲。 2)相位编码。罗兰 C 发射台发射的脉冲组中,8 个信号脉冲的载波初相位按一 图 3-1-1 罗兰 C 主副台配置图 化的现象称为相位编码。每一脉冲载波的初始相位只有两种状态:0 相和 π 相,或以“+”和“-” 来表示。主台和副台信号相位编码不同(各副台的相位编码相同),相邻两周期信号的相位编 码也不同,但主台的第 9 个脉冲不参加编码。罗兰 C 采用的相位编码序列如表 3-3-1 所示。 从表中可以看出,主、副台的各奇数脉冲在两个相邻脉冲组重复周期中相位不变,称为原码; 主、副台的偶数脉冲在两个相邻脉冲组重复周期中相位相反,即互为补码。利用相位编码
使接收设备便于实现对信号的自动搜索和自动识别主、副台信号,可消除前一脉冲高次天波 对后一脉冲干扰,还能起到改善信噪比、抑制连续波干扰的作用。 表3-1-1罗兰C相位编码序列 顺 位母 脉冲顺序 12345678912345678 第一思期t帅组 + ++++++ 3)编码延时。罗兰C台链的主台先发射,各刷台分别经过不同的基线延时和编码延时后 发射信号。基线延时为电波从主台传播到副台所需的时间,是用来解决双曲线位置线的双值 性问题:编码延时是当副台接收到主台信号后开始发射脉冲组信号的延迟时间,是用来区别 名副台的信号。它可以通过计算来确定其值的大小。于是可确保接收机按照M一W一X一Y 一乙的顺序接收到主副台信号。 3,台链识另 由于罗兰C的各发射台均以100kHz的载波频率发射脉神组信号,因此台链的识别只能 依据不同的脉冲组重复周期。新型罗兰C脉冲组重复周期的范围是从00010~99990μs,每 组重复周期间隔10s。实际使用中的重复周期取40000一99990us,并用其前面四位数字4000 999分别命名对应的台链。如8390的台链(中国罗兰C的东海链)的脉冲组重复周期为 83900u5 4应用现况 目前,罗兰C台链可以从无线电信号表第二卷中查得。大多数台链的台址都可以事先 存储于罗兰C接收机中,只要进入这些罗兰C导航台链的作用范围内,罗兰C接收机既能 测出时差,也可根据存储的台链资料,将所测时差换算成经纬度,但要注意到坐标系的修正。 时差测定 罗 C接收机通过重合脉冲包络粗测时差,即测出时差值的前四位数值,即万、千、 百、十位数值:比较载波相位精测时差,测出时差值的个位及小数点的数值 三、罗兰C宗位 罗兰C接收机测得两对或两对以上的台组时差。即可利用罗兰C海图或罗兰C表册求 得观测船位。由于罗兰C系统的作用距离远,因此利用罗兰C海图定位时,其准确度总要 受到海图比例尺的限制。当对观测船位的精度要求较高时,应尽量使用罗兰 C表册为好 自动罗兰C接收机能自动进行时差一坐标转换,直接给出船舶的经纬度,无需人工利 用罗兰C海图或罗兰C表册去定位。虽然大多数船舶现在都装备了自动罗兰C接收机,但 是介绍利用罗兰C海图和罗兰C表册定位的方法还是有必要的,因为自动罗兰C接收机只 能在地波范围内使用。要利用天波定位,就必须利用罗兰C海图成罗兰C表册,同时,利 用罗兰C海图或罗兰C表册定位是最基本的方法,在某些特殊场合仍有应用。 利用罗兰C海图定位 罗兰C海图是在墨卡托海图上 125 /25 分别用绿、褐、蓝和洋红等不同领色 18 -15 1618 印有表示不同罗兰C台组的双曲线 位置线格网,位置线上标有相应罗兰 推算船位 推算船位 台组的识别符号和对应于地波 号的时差值。如所测定的是天波时差 或天地波时差/地天波时差,则必须 17 -11 -10 -1 17-10 经过天波改正量或特殊改正量的或 正,换算为所对应的地波时差方可进 图3-1-2改正量内差
使接收设备便于实现对信号的自动搜索和自动识别主、副台信号,可消除前一脉冲高次天波 对后一脉冲干扰,还能起到改善信噪比、抑制连续波干扰的作用。 表 3-1-1 罗兰 C 相位编码序列 顺序 信号 主 台 副 台 脉冲顺序 1 2 3 4 5 6 7 8 91 2 3 6 7 8 4 5 第一周期脉冲组 ++-+-+-+ +++++-+ 第二周期脉冲组 +-++++++ + - + - + + - - 3 C 台 的各发射台均以 100kHz 的载波频率发射脉冲组信号,因此台链的识别只能 况 C 台链可以从无线电信号表第二卷中查得。大多数台链的台址都可以事先 存储 过重合脉冲包络粗测时差,即测出时差值的前四位数值,即万、千、 两对或两对以上的台组时差。即可利用罗兰 C 海图或罗兰 C 表册求 得 用罗 图上 )编码延时。罗兰 链的主台先发射,各副台分别经过不同的基线延时和编码延时后 发射信号。基线延时为电波从主台传播到副台所需的时间,是用来解决双曲线位置线的双值 性问题;编码延时是当副台接收到主台信号后开始发射脉冲组信号的延迟时间,是用来区别 各副台的信号。它可以通过计算来确定其值的大小。于是可确保接收机按照 M-W-X-Y -Z 的顺序接收到主副台信号。 3.台链识别 由于罗兰 C 依据不同的脉冲组重复周期。新型罗兰 C 脉冲组重复周期的范围是从 00010~99990μs,每 组重复周期间隔 10μs。实际使用中的重复周期取 40000~99990μs,并用其前面四位数字 4000 一 9999 分别命名对应的台链。如 8390 的台链(中国罗兰 C 的东海链)的脉冲组重复周期为 83900μs。 4.应用现 目前,罗兰 于罗兰 C 接收机中,只要进入这些罗兰 C 导航台链的作用范围内,罗兰 C 接收机既能 测出时差,也可根据存储的台链资料,将所测时差换算成经纬度,但要注意到坐标系的修正。 二、时差测定 罗兰 C 接收机通 百、十 位数值;比较载波相位精测时差,测出时差值的个位及小数点的数值。 三、罗兰 C 定位 罗兰 C 接收机测得 观测船位。由于罗兰 C 系统的作用距离远,因此利用罗兰 C 海图定位时,其准确度总要 受到海图比例尺的限制。当对观测船位的精度要求较高时,应尽量使用罗兰 C 表册为好。 自动罗兰 C 接收机能自动进行时差一坐标转换,直接给出船舶的经纬度,无需人工利 兰 C 海图或罗兰 C 表册去定位。虽然大多数船舶现在都装备了自动罗兰 C 接收机,但 是介绍利用罗兰 C 海图和罗兰 C 表册定位的方法还是有必要的,因为自动罗兰 C 接收机只 能在地波范围内使用,要利用天波定位,就必须利用罗兰 C 海图或罗兰 C 表册,同时,利 用罗兰 C 海图或罗兰 C 表册定位是最基本的方法,在某些特殊场合仍有应用。 1.利用罗兰 C 海图定位 罗兰 C 海图是在墨卡托海 图 3-1-2 改正量内差 分别用绿、褐、蓝和洋红等不同颜色 印有表示不同罗兰 C 台组的双曲线 位置线格网,位置线上标有相应罗兰 C 台组的识别符号和对应于地波信 号的时差值。如所测定的是天波时差 或天地波时差/地天波时差,则必须 经过天波改正量或特殊改正量的改 正,换算为所对应的地波时差方可进
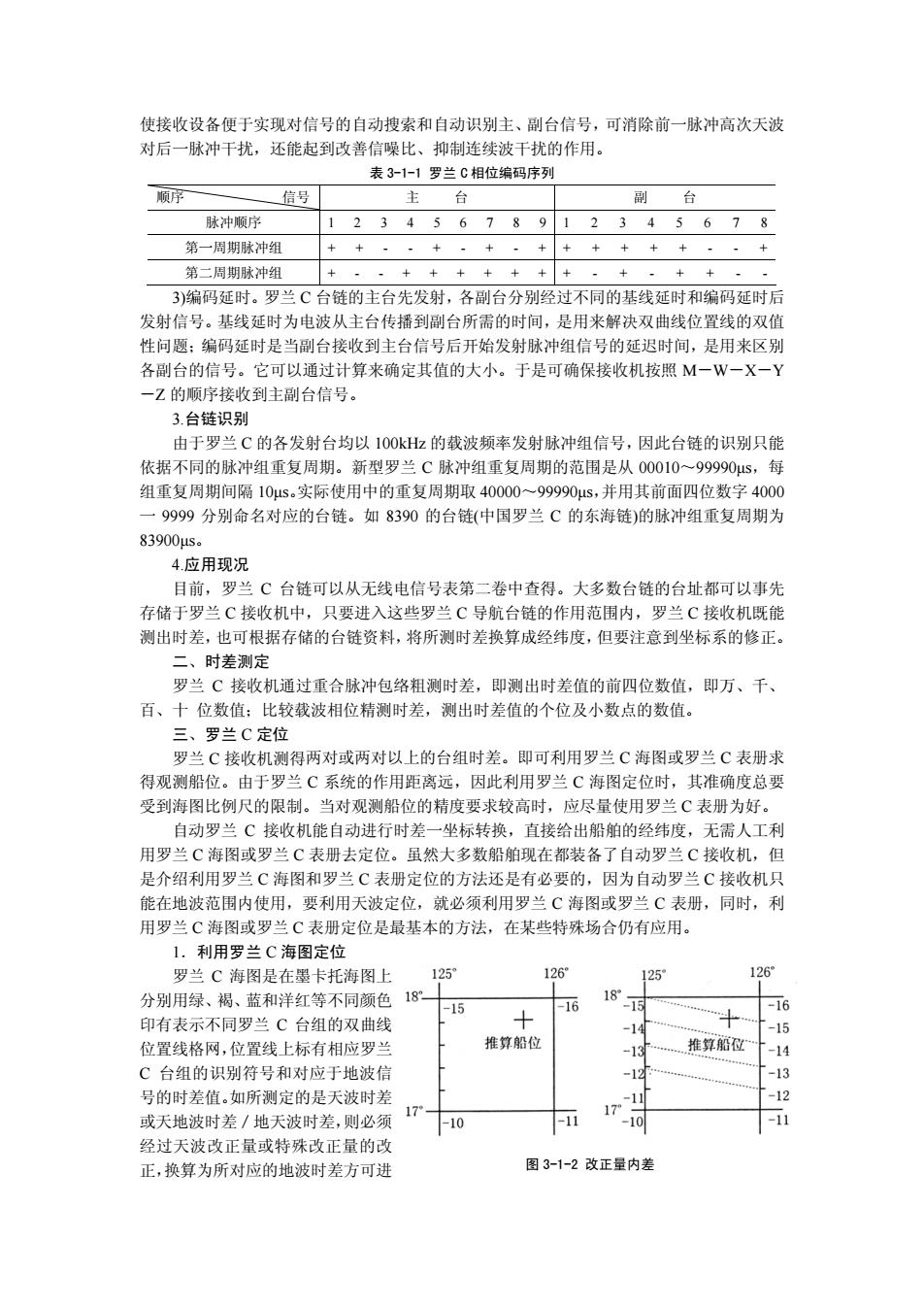
行定位。天波改正量和特殊改正量标示在经纬线的交点附近。 一般所测定的时差值不恰好与海图位置线上所标示的时差值相一致,这时应在与所测定 时差相邻的两条《 置线间进行内插,画出对应于测定时差的位置 般可以采用等分 内插法,但在船位接近基线延伸线附近时,由于位置线间的间隔变化是不均匀的,应采用不 等分刻度内插法。 天波改正量和特殊改正量,须根据推算船位讲行内插而求得。内插方法加图312,先 作等分,后用直线连接各等值点,即可求得推算船位附近的天波改正量,例如图中推算船位 处的天波改正量应为-14.8μs 利用罗兰C表定位 在罗兰表册中都有详细的使用方法的介绍和范例,由于教材篇幅的限制,以下只作简单 的介绍。 (1)罗兰C位晋线 罗C位线表表列的第一行T为地波的时俏 一般是每间隔10μs列出。在整个罗 兰C的作用区域 ,表列点的间隔为纬度1°和经度1°。在接近发射台的地区 线的曲*率较大,则以5'或30'的间隔插入附加点。在距发射台20 n mile以内的区域,双曲 线的曲率更大,用两点连成的直线作为位置线,将引起明显的误差。在这种情况下,应采用 平滑曲线连接以此相邻的3个点的办法使连线较接近于双曲线位置线。在每个罗兰C表的 上方都标有罗兰C台组的名称。 (2)天波改正量表 在罗兰C表册中和罗兰C海图中一样,天波改正量也分为白天和夜间两种。用于计算 白天的天波改正量的电离层高度为3km,夜间为91km。 (3)特殊败正最表 罗兰C定位有时需要“主台天波配合别台地波或“主台地波配合别台天波”来测时差,此 注意分清是“主台天波配合剧台地波 3.利用自动罗兰C接收机定位 由于自动罗兰C接收机给出的船位大都是WGS-2坐标系下的经、纬度,因此从自动 罗兰C接收机获得的船位应根据海图所注的相应的坐标系修正量进行修正后方可画到海图 上去,尤其在大比例尺海图上作业时,中应注竞。 1.测定时差误差 (1)主、副台同步误差。对罗兰C发射台来说,主、副台发射之间的精确时间间隔不 -致仅能引起一个小量值的误差,这一误差约为0.03-006s。若同步误差超过02s的时 间达到1mn以上时,则主台信号的第九个脉冲呈闪烁状或不停地左右移动 (2)地波传播误差 地波信号经陆地传播后会产生地波传播误差。在选择台 链时,应尽量避免选择途经陆地的发射台。 (3)天波改正量误差。这项误差主要由于表册天波改正量相对应的电离层高度与实际 电离层高度不同而引起的.其误差为11.5us (4)测定时波形重合误差。为了进行精确测定,罗兰C不仅要进行信号波形重合,而 且还要使相位重合。对于手动测量的AC接收机 ,此项误差可达3:对于自动罗兰C接 收机,此项误差小于0.1山s 2.船舶与发射台组的相对位置 相同时差误差在基线上引起的位置误差最小,而在基线延伸线上引起的误差最大
行定位。天波改正量和特殊改正量标示在经纬线的交点附近。 一般所测定的时差值不恰好与海图位置线上所标示的时差值相一致,这时应在与所测定 殊改正量,须根据推算船位进行内插而求得。内插方法如图 3-1-2,先 使用方法的介绍和范例,由于教材篇幅的限制,以下只作简单 的介 兰 C 位置线表 一行“T”为地波的时差值,一般是每间隔 10µs 列出。在整个罗 兰 兰 C 海图中一样,天波改正量也分为白天和夜间两种。用于计算 白天 “主台天波配合副台地波”或“主台地波配合副台天波”来测时差,此 时, 位大都是 WGS-72 坐标系下的经、纬度,因此从自动 的因素有: 误差。对罗兰 C 发射台来说,主、副台发射之间的精确时间间隔不 一致 。在选择台 于表册天波改正量相对应的电离层高度与实际 ,罗兰 C 不仅要进行信号波形重合,而 置 置误差最小,而在基线延伸线上引起的误差最大。 时差相邻的两条位置线间进行内插,画出对应于测定时差的位置线。一般可以采用等分刻度 内插法,但在船位接近基线延伸线附近时,由于位置线间的间隔变化是不均匀的,应采用不 等分刻度内插法。 天波改正量和特 作等分,后用直线连接各等值点,即可求得推算船位附近的天波改正量,例如图中推算船位 处的天波改正量应为-14.8 µs。 2.利用罗兰 C 表定位 在罗兰表册中都有详细的 绍。 (1)罗 罗兰 C 位置线表表列的第 C 的作用区域内,表列点的间隔为纬度 1º 和经度 1º。在接近发射台的地区,双曲线位置 线的曲率较大,则以 15′或 30′的间隔插入附加点。在距发射台 20 n mile 以内的区域,双曲 线的曲率更大,用两点连成的直线作为位置线,将引起明显的误差。在这种情况下,应采用 平滑曲线连接以此相邻的 3 个点的办法使连线较接近于双曲线位置线。在每个罗兰 C 表的 上方都标有罗兰 C 台组的名称。 (2)天波改正量表 在罗兰 C 表册中和罗 的天波改正量的电离层高度为 73 km,夜间为 91 km。 (3)特殊改正量表 罗兰 C 定位有时需要 就应用特殊改正量去修正。在罗兰 C 表册的前部分均列有“特殊改正量表”。使用时必须 注意分清是“主台天波配合副台地波”,还是“主台地波配合副台天波”。 3.利用自动罗兰 C 接收机定位 由于自动罗兰 C 接收机给出的船 罗兰 C 接收机获得的船位应根据海图所注的相应的坐标系修正量进行修正后方可画到海图 上去,尤其在大比例尺海图上作业时,更应注意。 三、罗兰 C 定位精度 影响罗兰 C 船位线精度 1.测定时差误差 (1)主、副台同步 仅能引起一个小量值的误差,这一误差约为 0.03~0.06 µs。若同步误差超过±0.2μs 的时 间达到 lmin 以上时,则主台信号的第九个脉冲呈闪烁状或不停地左右移动。 (2)地波传播误差。罗兰 C 的地波信号经陆地传播后会产生地波传播误差 链时,应尽量避免选择途经陆地的发射台。 (3)天波改正量误差。这项误差主要由 电离层高度不同而引起的,其误差为 1~1.5 µs。 (4)测定时波形重合误差。为了进行精确测定 且还要使相位重合。对于手动测量的 A/C 接收机,此项误差可达 3 µs;对于自动罗兰 C 接 收机,此项误差小于 0.1 µs 。 2.船舶与发射台组的相对位 相同时差误差在基线上引起的位
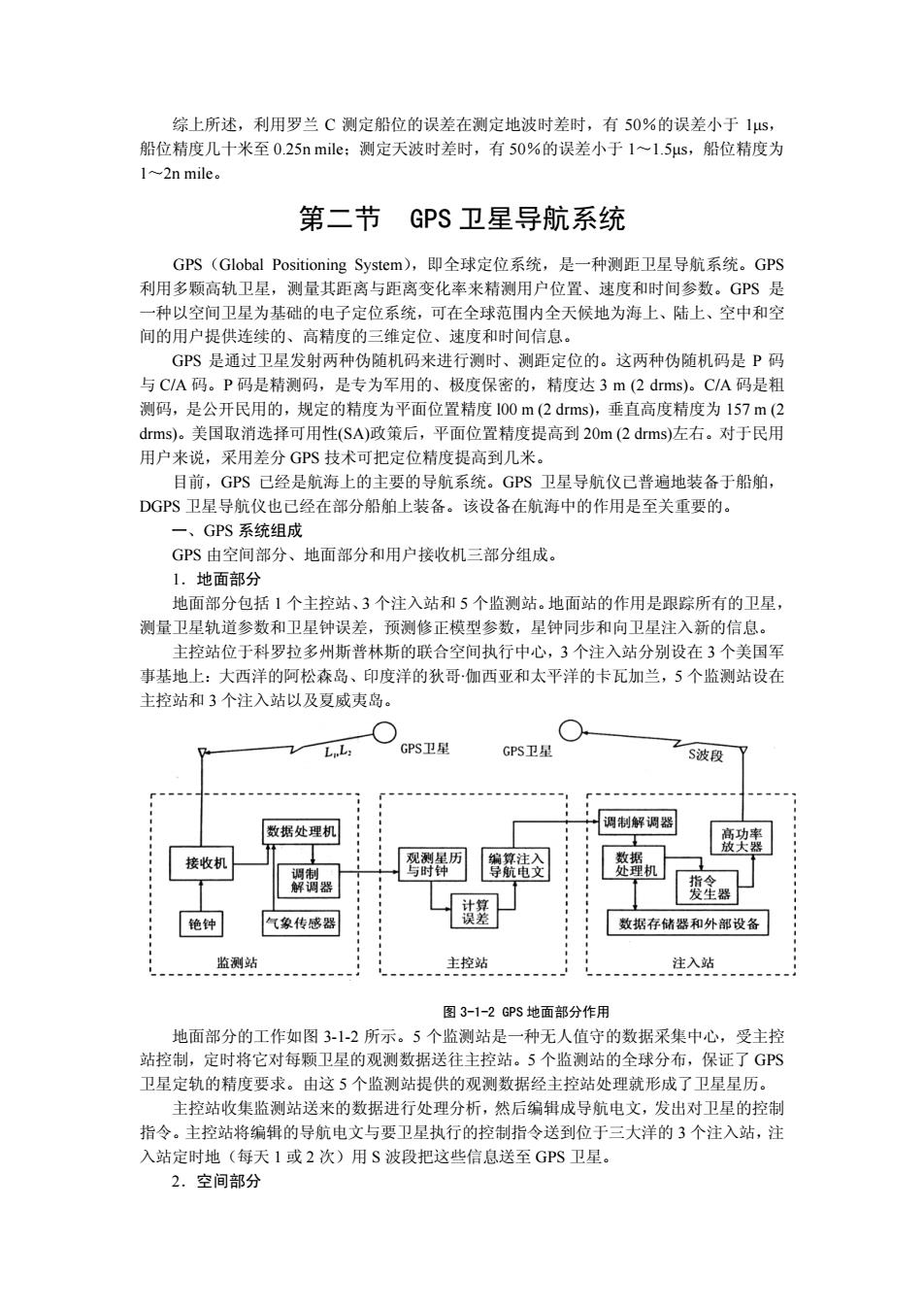
综上所述,利用罗兰C测定船位的误差在测定地波时差时,有50%的误差小于1s, 船位精度几十米至0.25 n mile:测定天波时差时,有50%的误差小于1~1.5s,船位精度为 1-2 mile. 第二节GPS卫星导航系统 GPS(Global Positioning System),即全球定位系统,是一种测距卫星导航系统。GPs 利用多颗高轨卫星,测量其距离与距离变化率来精测用户位置、速度和时间参数。GS是 一种以空间卫星为基础的电子定位系统,可在全球范围内全天候地为海上、陆上、空中和空 间的用户提供连续的、高精度的三维定位、速度和时间信息。 GS是通过卫星发射两种伪随机码来进行测时、测距定位的。这两种伪随机码是P码 与CA码。P码是精测码 专为军用的、极度保密的,精度达3m(2dms.CA码是料 测码,是公开民用的,规定的精度为平面位置精度100m(2dms,垂直高度精度为157m(2 dms)。美国取消选择可用性(S)政策后,平面位置精度提高到2Om(2drms)左右。对于民用 用户来说,采用差分GPS技术可把定位精度提高到几米。 目前,GPS已经是航海上的牛要的导航系统。GS卫星导航仪已普骗地装备于船帕 DGS卫星导航仪也已经在部分船帕上装备。该设备在航海中的作用是至关重要的。 GPS系统组成 GPS由空间部分、地面部分和用户接收机三部分组成: 1.地面部分 地面部分包括1个主控站、3个注入站和5个监测站。地面站的作用是跟踪所有的卫星 测量卫星轨道参数和卫星钟误差, 入站分别设在3个美国等 事基地上:大西洋的阿松森岛、印度洋的狄哥伽西亚和太平洋的卡瓦加兰,5个监测站设在 主控站和3个注入站以及夏威夷岛。 ○ GPS卫星 S波段 数据处理机 调制解调器 薇史 接收机 器网赺 数机 全器 绝钟 气象传感器 超 数据存储器和外部设备 监测站 ,主控站 注入站 图3-1-2Ps地而部分作用 地面部分的工作如图312所示。5个监测站是一种无人值守的数据采集中心,受主榜 站控制,定时将它对每颗卫星的观测数据送往主控站。5个监测站的全球分布,保证了G 卫星定轨的精度要求 由这5个监测站提供的观测数据经主控站处理就形成了卫星星历, 主控站收集监测站送来的数据进行处理分析,然后编辑成导航电文,发出对卫星的控制 指令。主控站将编辑的导航电文与要卫星执行的控制指令送到位于三大洋的3个注入站,注 入站定时地(每天1或2次)用S波段把这些信息送至GPS卫星。 2.空间部分
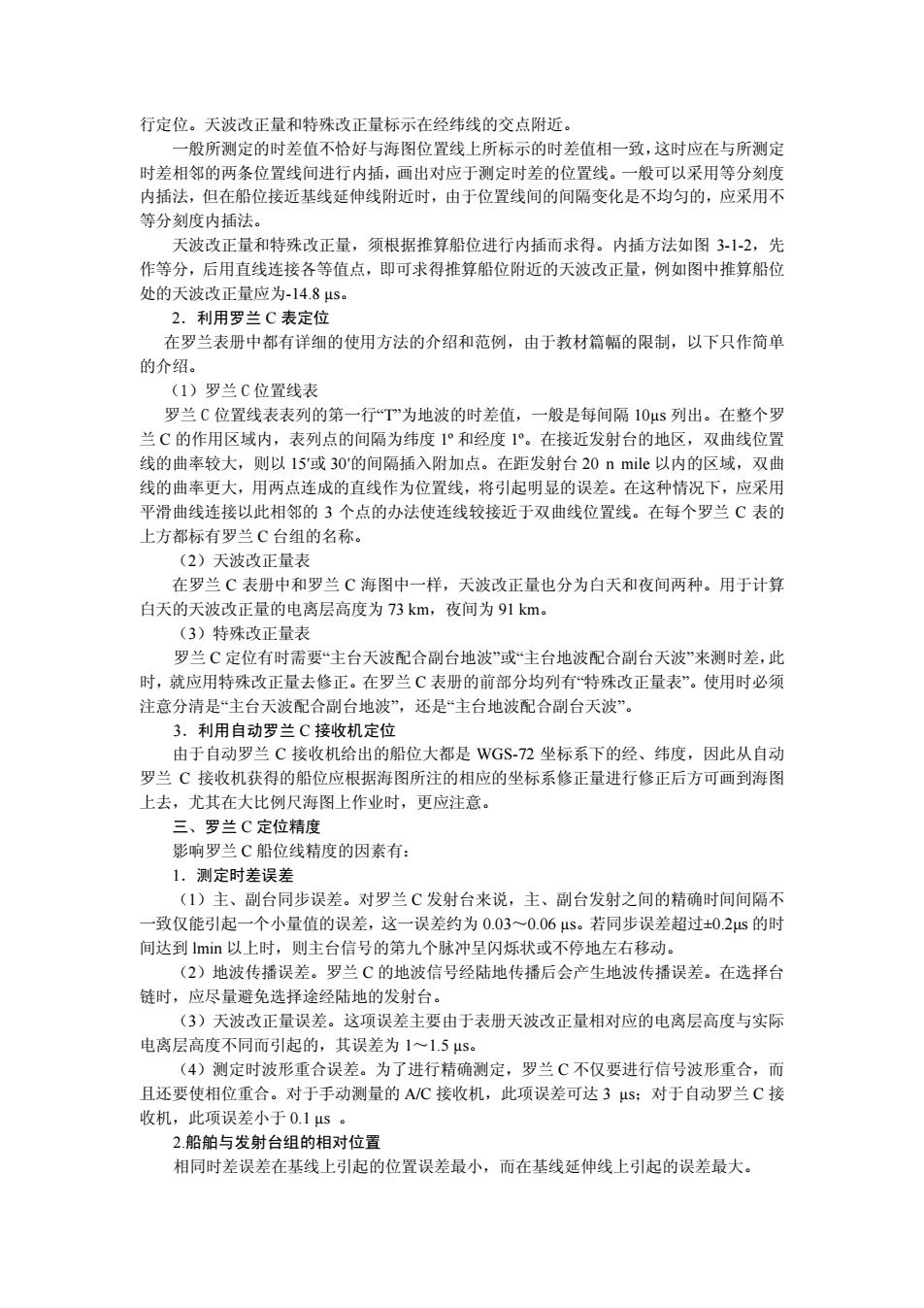
综上所述,利用罗兰 C 测定船位的误差在测定地波时差时,有 50%的误差小于 1μs, 船位 第二节 GPS 卫星导航系统 GPS(Global Positioning System),即全球定位系统,是一种测距卫星导航系统。GPS 利用 。这两种伪随机码是 P 码 与 C 导航仪已普遍地装备于船舶, 面部分和用户接收机三部分组成。 1 个主控站、3 个注入站和 5 个监测站。地面站的作用是跟踪所有的卫星, 测量 事基 站控 指令 精度几十米至 0.25n mile;测定天波时差时,有 50%的误差小于 1~1.5μs,船位精度为 1~2n mile。 多颗高轨卫星,测量其距离与距离变化率来精测用户位置、速度和时间参数。GPS 是 一种以空间卫星为基础的电子定位系统,可在全球范围内全天候地为海上、陆上、空中和空 间的用户提供连续的、高精度的三维定位、速度和时间信息。 GPS 是通过卫星发射两种伪随机码来进行测时、测距定位的 /A 码。P 码是精测码,是专为军用的、极度保密的,精度达 3 m (2 drms)。C/A 码是粗 测码,是公开民用的,规定的精度为平面位置精度 l00 m (2 drms),垂直高度精度为 157 m (2 drms)。美国取消选择可用性(SA)政策后,平面位置精度提高到 20m (2 drms)左右。对于民用 用户来说,采用差分 GPS 技术可把定位精度提高到几米。 目前,GPS 已经是航海上的主要的导航系统。GPS 卫星 DGPS 卫星导航仪也已经在部分船舶上装备。该设备在航海中的作用是至关重要的。 一、GPS 系统组成 GPS 由空间部分、地 1.地面部分 地面部分包括 卫星轨道参数和卫星钟误差,预测修正模型参数,星钟同步和向卫星注入新的信息。 主控站位于科罗拉多州斯普林斯的联合空间执行中心,3 个注入站分别设在 3 个美国军 地上:大西洋的阿松森岛、印度洋的狄哥·伽西亚和太平洋的卡瓦加兰,5 个监测站设在 主控站和 3 个注入站以及夏威夷岛。 图 3-1-2 GPS 地面部分作用 地面部分的工作如图 3-1-2 所示。5 个监测站是一种无人值守的数据采集中心,受主控 制,定时将它对每颗卫星的观测数据送往主控站。5 个监测站的全球分布,保证了 GPS 卫星定轨的精度要求。由这 5 个监测站提供的观测数据经主控站处理就形成了卫星星历。 主控站收集监测站送来的数据进行处理分析,然后编辑成导航电文,发出对卫星的控制 。主控站将编辑的导航电文与要卫星执行的控制指令送到位于三大洋的 3 个注入站,注 入站定时地(每天 1 或 2 次)用 S 波段把这些信息送至 GPS 卫星。 2.空间部分