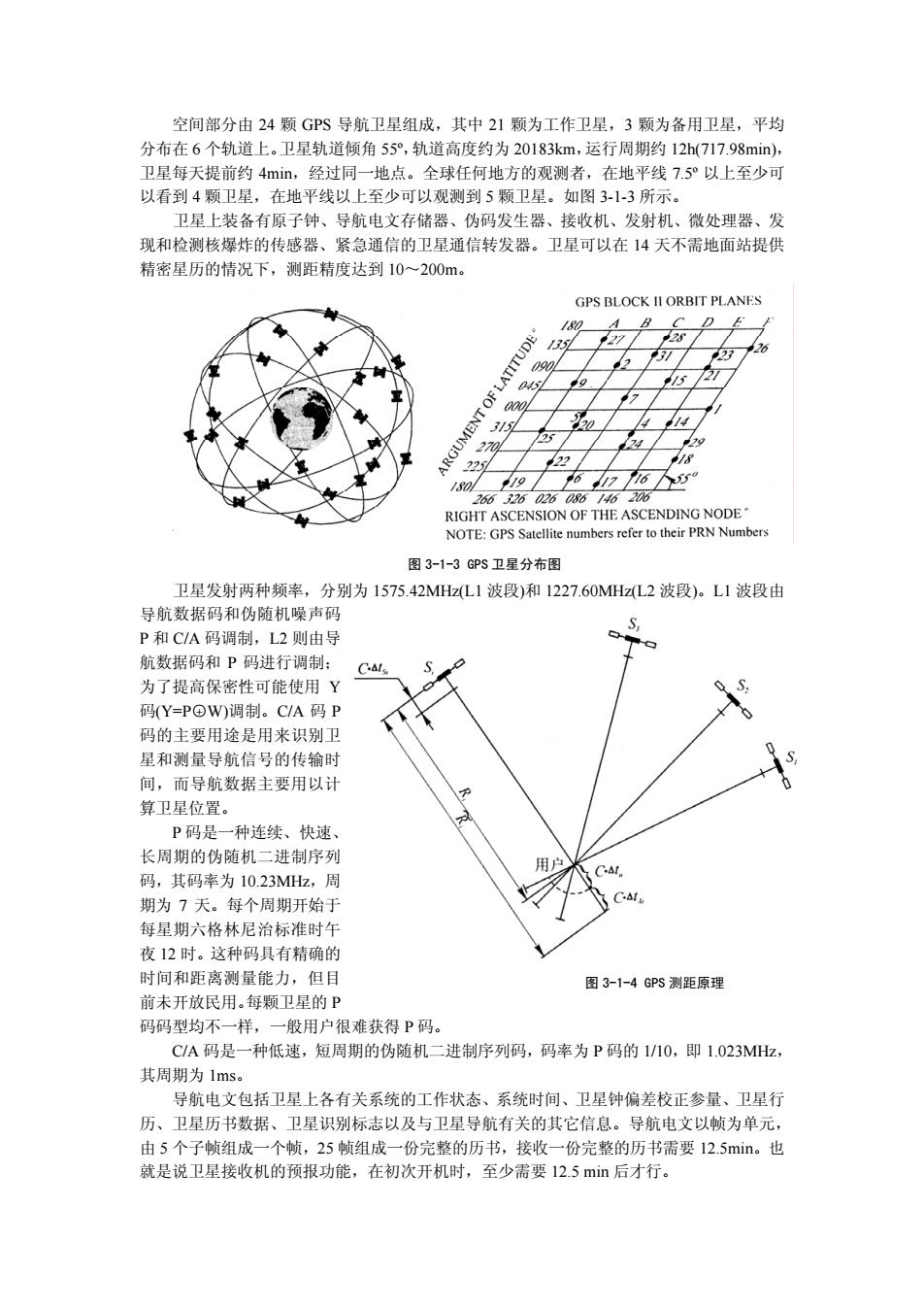
空间部分由24颗GPS导航卫星组成,其中21颗为工作卫星,3颗为备用卫星,平均 分布在6个轨道上。卫是轨道悟角550.轨首高度约为20183张m.云行周期约12h71798min 卫星每天提前 。全球任何地方的观测者。 在地平线7.5°以上至少 以看到4颗卫星,在地平线以上至少可以观测到5颗卫星。如图3-13所示。 卫星上装备有原子钟、导航电文存储器、伪码发生器、接收机、发射机、微处理器、发 现和检测核爆炸的传感器、紧急通信的卫星通信转发器。卫星可以在14天不需地面站提供 特密星历的情况下,测距精度达到10~200m. GPS BLOCK II ORBIT PLANES B 人 人 E THE ASCENDING NODE NOTE:GPS Satellite numbers refer to their PRN Numbers 图3-1-3GPS卫星分布图 卫星发射两种频率,分别为1575.42MHL1波段)和1227.60MHzL2波段)。L1波段由 导航数据码和伪随机噪声码 P和CA码调制,L2则由号 航数据码和P码进行调制: 为了提高保密性可能使用Y 已y=p④W调制。C/A码p 码的主要用途是用来识别卫 星和测量导航信号的传输时 而导航数据主要用以计 算卫位置 P码是一种连续、快速 长周期的伪随机二进制序列 码.其码率为1023MHz.困 期为7天。每个周期开始 每星期六格林尼治标准时今 夜12时。这种码具有精确的 时间和距离测量能力,但目 图3-1-4GPs测距原理 前未开放民用。每颗卫星的 码码型均不一样, 殷用 很难获得P码 CA码是一种低速,短周期的伪随机二进制序列码,码率为P码的11O,即1.023Mz 其周期为1ms。 导航电文包括卫星上各有关系统的工作状态、系统时间、卫星钟偏差校正参量、卫星行 历、卫星历书数据、卫星识别标志以及与卫星导航有关的其它信息。导航电文以城为单元, 由5个子组成一个,25组成一份完整的历书,接收 份完整的历书需要12.5min。也 就是说卫星接收机的预报功能,在初次开机时, 至少需要125min后才行
空间部分由 24 颗 GPS 导航卫星组成,其中 21 颗为工作卫星,3 颗为备用卫星,平均 分布 处理器、发 现和 卫星发射两种频率,分别为 1575.42MHz(L1 波段)和 1227.60MHz(L2 波段)。L1 波段由 导 连续、快速、 长周 制序列码,码率为 P 码的 1/10,即 1.023MHz, 其周期为 卫星上各有关系统的工作状态、系统时间、卫星钟偏差校正参量、卫星行 历、卫星历书数据、卫星识别标志以及与卫星导航有关的其它信息。导航电文以帧为单元, 在 6 个轨道上。卫星轨道倾角 55º,轨道高度约为 20183km,运行周期约 12h(717.98min), 卫星每天提前约 4min,经过同一地点。全球任何地方的观测者,在地平线 7.5º 以上至少可 以看到 4 颗卫星,在地平线以上至少可以观测到 5 颗卫星。如图 3-1-3 所示。 卫星上装备有原子钟、导航电文存储器、伪码发生器、接收机、发射机、微 检测核爆炸的传感器、紧急通信的卫星通信转发器。卫星可以在 14 天不需地面站提供 精密星历的情况下,测距精度达到 10~200m。 航数据码和伪随机噪声码 P 和 C/A 码调制,L2 则由导 航数据码和 P 码进行调制; 为了提高保密性可能使用 Y 码(Y=P○+ W)调制。C/A 码 P 码的主要用途是用来识别卫 星和测量导航信号的传输时 间,而导航数据主要用以计 算卫星位置。 P 码是一种 期的伪随机二进制序列 码,其码率为 10.23MHz,周 期为 7 天。每个周期开始于 每星期六格林尼治标准时午 夜 12 时。这种码具有精确的 时间和距离测量能力,但目 前未开放民用。每颗卫星的 P 码码型均不一样,一般用户很 C/A 码是一种低速,短周期的伪随机二进 图 3-1-3 GPS 卫星分布图 图 3-1-4 GPS 测距原理 难获得 P 码。 1ms。 导航电文包括 由 5 个子帧组成一个帧,25 帧组成一份完整的历书,接收一份完整的历书需要 12.5min。也 就是说卫星接收机的预报功能,在初次开机时,至少需要 12.5 min 后才行
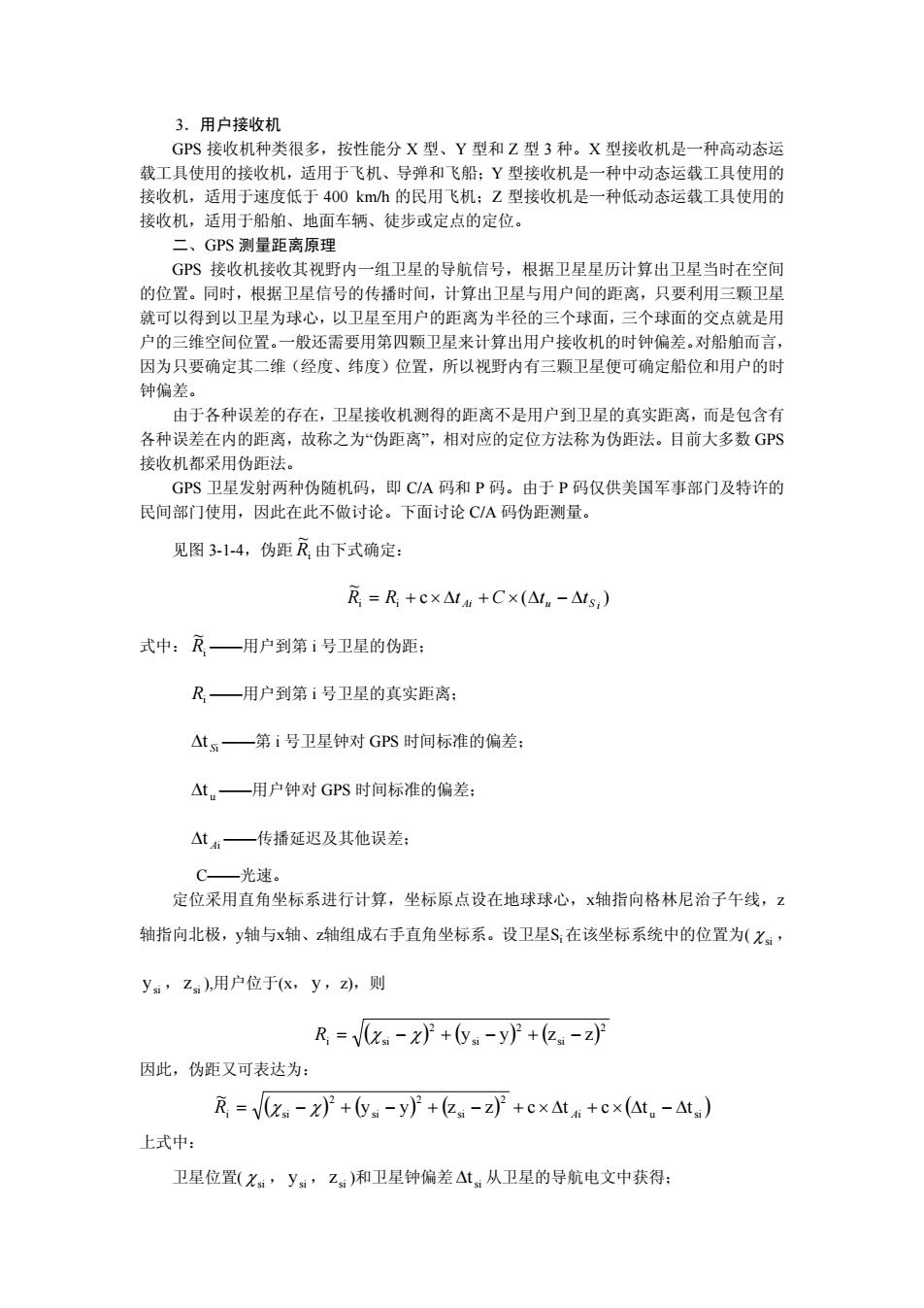
3.用户接收机 GPS接收机种类很多,按性能分X型、Y型和Z型3种。X型接收机是一种高动态运 载工具使用的接收机,适用于飞机、导弹和飞船;Y型接收机是一种中动态运载工具使用的 接收机,适用于速度低于400kmh的民用飞机:乙 型接收机是一种低动态运载工具使用的 接收机,适用于船舶、地面车辆、徒步或定点的定位。 二、GPS测量距离原理 GS接收机接收其视野内一组卫星的导航信号,根据卫星星历计算出卫星当时在空间 的位置。同时,根据卫星信号的传播时间,计算出卫星与用户间的距离,只要利用三颗卫星 就可以得到以卫星为球心,以卫星至用户的距离为半径的三个球面,三个球面的交点就是用 户的三维空间位置。一般还需要用第四颗卫星来计算出用户接收机的时钟偏差。对船舶而言 因为只要确定其二维(经度、纬度)位置,所以视野内有三颗卫星便可确定船位和用户的时 钟偏差。 由于名种误羌的在在,卫星接收机测得的距离不是用户到卫星的直实距离,而是包含有 各种误差在内的距离,故称之为“伪距离”,相对应的定位方法称为伪距法。目前大多数G 接收机都采用伪距法 GPS卫星发射两种伪随机码,即C/A码和P码。由于P码仅供美国军事部门及特许的 民间部门使用,因此在此不做讨论。下面讨论CA码伪距测量。 见图314,伪距由下式确定 R=R+c×1+C×(△1.-△1g,) 式中:一用户到第i号卫星的伪距: R一用户到第i号卫星的真实距离 △t。一第i号卫星钟对GPS时间标准的偏差: △t。—用户钟对GPS时间标准的偏差: △t6—传播延迟及其他误差; C一光速。 定位采用直角坐标系进行计算,坐标原点设在地球球心,x轴指向格林尼治子午线,z 轴指向北极,y轴与x轴、2轴组成右手直角坐标系。设卫星S,在该坐标系统中的位置为(X。 ya,Za)用户位于x,y,2,则 R=Vx-x}2+y.-yy+亿.-z 因此,伪距又可表达为: 元=Vx.-x}+yn-y+亿a-z+c×△t+c×(△t。-△t) 上式中: 卫星位置(X.,y。,Z。)和卫星钟偏差△t,从卫星的导航电文中获得:
3.用户接收机 很多,按性能分 X 型、Y 型和 Z 型 3 种。X 型接收机是一种高动态运 的导航信号,根据卫星星历计算出卫星当时在空间 的位 种误差的存在,卫星接收机测得的距离不是用户到卫星的真实距离,而是包含有 各种 随机码,即 C/A 码和 P 码。由于 P 码仅供美国军事部门及特许的 民间 见图 3-1-4,伪距 由下式确定: GPS 接收机种类 载工具使用的接收机,适用于飞机、导弹和飞船;Y 型接收机是一种中动态运载工具使用的 接收机,适用于速度低于 400 km/h 的民用飞机;Z 型接收机是一种低动态运载工具使用的 接收机,适用于船舶、地面车辆、徒步或定点的定位。 二、GPS 测量距离原理 GPS 接收机接收其视野内一组卫星 置。同时,根据卫星信号的传播时间,计算出卫星与用户间的距离,只要利用三颗卫星 就可以得到以卫星为球心,以卫星至用户的距离为半径的三个球面,三个球面的交点就是用 户的三维空间位置。一般还需要用第四颗卫星来计算出用户接收机的时钟偏差。对船舶而言, 因为只要确定其二维(经度、纬度)位置,所以视野内有三颗卫星便可确定船位和用户的时 钟偏差。 由于各 误差在内的距离,故称之为“伪距离”,相对应的定位方法称为伪距法。目前大多数 GPS 接收机都采用伪距法。 GPS 卫星发射两种伪 部门使用,因此在此不做讨论。下面讨论 C/A 码伪距测量。 ~ Ri c )( ~ ii Ai Su i Δ−Δ×+Δ×+= ttCtRR 式中: ——用户到第 i 号卫星的伪距; ——用户到第 i 号卫星的真实距离; ——第 i 号卫星钟对 GPS 时间标准的偏差; ——用户钟对 GPS 时间标准的偏差; ——传播延迟及其他误差; C— 系进行计算,坐标原点设在地球球心,x轴指向格林尼治子午线,z i i ~ R Ri i t Δ S u Δt i t Δ A —光速。 定位采用直角坐标 轴指向北极,y轴与x轴、z轴组成右手直角坐标系。设卫星S 在该坐标系统中的位置为( χ si , ysi , 用户位于(x, ,z),则 ) si z ), y ( )( )( 2 si 2 si 2 i si R χχ −+−+−= zzyy 因此,伪距又可表达为: ( ) ( )( ) ( ) i siu 2 si 2 si 2 i si ttctczzyy ~ R A Δ−Δ×+Δ×+−+−+ 上式中: 置 −= χχ , , 和卫星钟偏差 ysi si z ) si ( Δt 卫星位 χ si 从卫星的导航电文中获得;
传播延迟误差△t,中的电离层延迟误差可利用导航电文中电离层校正参数,用传播延 迟模型估算得到。 若用户接收机测得第i号卫星的伪距延时量为△t,则 元=cxAt 所以,可以得到下列方程 AM=2z-z}+6.-y+6.-2可+a,-M。i=1234 这个方程中,共有用户三维位置x,y,z)及用户钟的偏差△t.这4个未知数。当用户 接收机接收4颗卫星的信号,也就可以得到4个方程,解这个联立方程组,就可以得到用户 的三维位置与用户钟偏差。当用户配备了精密的用户时钟,则只要接收3颗卫星的信号,就 可以解出用户三维位置。当用户高度数据已知时,只需求解二维水平位置,也只需接收3 颗卫星的信号就足够了。 当接收机能接收多于4颗卫星的信号时,接收机采用最小二乘法来自动求得最概率三维 位 三、船用GP卫星导航仪 1.种类 用GPS卫星信号进行定位和导航的GPS接收机称为GPS卫星导航仪。船用GPS卫星 导航仪是利用CA码测距定位的,按接收机通道方式分类,船用GPS卫星导航仪分为: (1)时序卫星导航仪是一种最简单的接收机。一般采用单通道或双通道,按时间分割 法以此实现对各个卫星电文的提取与伪距离测量 (2)多路复用卫星导航仪是一种单通道多路复用接收机。它能同时接收多颗卫军的信 号,而共用同一通道,以此来抵消通道问的时延差别。它能淮同步观测几颗卫星。 (3)多通道卫星导航仪,又称为并行通道接收机。它能同时接收几颗卫星的信号,且 通道间时延偏差很小。这是当前船用GS接收机的发展方向。 2.安装 GS天线安装应避免被大枪、其它导航设备天线等阻挡 不要安装在雷达垂直波束之 内,与常用的导航设备天线的距离应大于1m,与卫星通信设备天线的距离应大于5m。GPS 天线接头处应包扎好,防潮,防水。使用的导线应尽可能短并远离其它设备的发射天线。主 机应安装在避免振动、潮湿、高温、阳光直射的处所,尽量远离其它导航和通信设备,接地 要可靠。 3.启动 GS卫星导航仪的启动分为日常启动、热启动和冷肩动三种: (1)日常启动:船帕在航行或停泊期间日常的关机后的启动称为日常启动。这种情况 下由于关机前GS卫星导航仪中已存储了数据并且导航仪内置时钟在运行,启动时只需按 下电源键即可自动定位。 (2)热启动:如船位变化不大于100英里或3个月(具体参照仪器说明书)以内进行 过通电接收卫星信号,已收集过历书,进行的启动称为热启动。启动时,只需按下电源键使 参考振荡器加热(一般在20分钟内)后,GS卫星导航仪即可自动定位。 (3)冷启动:安装后第一次启动、所存的历书太陈旧或者所有数据被清除、船位变化 不大于100英里或3个月(具体参照仪器说明书)以上没有通电接收过卫星信号等三种情况
传播延迟误差 t Δ Ai 中的 离层延迟误差 用导航电文中电离层校正参数 电 可利 ,用传播延 若用户接收机测得第 i 号卫星的伪距延时量为 迟模型估算得到。 pi Δt ,则 t i pi c ~ R Δ×= 所以,可以得到下列方程: ( )( )( ) siu 2 si 2 si 2 pi si c χ ttzzyy 1 t χ Δ−Δ+−+−+−=Δ i = 1,2,3,4 这个方程中,共有用户三维位置(x, ,y z)及用户钟的偏差 u Δt 这 4 个未知数。当用户 当用户配备了精密的用户时钟,则只要接收 颗卫星的信号,就 种类 导航的 GPS 接收机称为 GPS 卫星导航仪。船用 GPS 卫星 C/A 码测距定位的,按接收机通道方式分类,船用 GPS 卫星导航仪分为: 。它能准同步观测几颗卫星。 雷达垂直波束之 内, 航设备天线的距离应大于 1m,与卫星通信设备天线的距离应大于 5m。GPS 天线 航仪的启动分为日常启动、热启动和冷启动三种。 启动:船舶在航行或停泊期间日常的关机后的启动称为日常启动。这种情况 下由 在运行,启动时只需按 下电 集过历书,进行的启动称为热启动。启动时,只需按下电源键使 参考 号等三种情况 接收机接收 4 颗卫星的信号,也就可以得到 4 个方程,解这个联立方程组,就可以得到用户 的三维位置与用户钟偏差。 3 可以解出用户三维位置。当用户高度数据已知时,只需求解二维水平位置,也只需接收 3 颗卫星的信号就足够了。 当接收机能接收多于 4 颗卫星的信号时,接收机采用最小二乘法来自动求得最概率三维 位置。 三、船用 GPS 卫星导航仪 1. 用 GPS 卫星信号进行定位和 导航仪是利用 (1)时序卫星导航仪是一种最简单的接收机。一般采用单通道或双通道,按时间分割 法以此实现对各个卫星电文的提取与伪距离测量。 (2)多路复用卫星导航仪是一种单通道多路复用接收机。它能同时接收多颗卫星的信 号,而共用同一通道,以此来抵消通道问的时延差别 (3)多通道卫星导航仪,又称为并行通道接收机。它能同时接收几颗卫星的信号,且 通道间时延偏差很小。这是当前船用 GPS 接收机的发展方向。 2.安装 GPS 天线安装应避免被大桅、其它导航设备天线等阻挡,不要安装在 与常用的导 接头处应包扎好,防潮,防水。使用的导线应尽可能短并远离其它设备的发射天线。主 机应安装在避免振动、潮湿、高温、阳光直射的处所,尽量远离其它导航和通信设备,接地 要可靠。 3.启动 GPS 卫星导 (1)日常 于关机前 GPS 卫星导航仪中已存储了数据并且导航仪内置时钟 源键即可自动定位。 (2)热启动:如船位变化不大于 100 英里或 3 个月(具体参照仪器说明书)以内进行 过通电接收卫星信号,已收 振荡器加热(一般在 20 分钟内)后,GPS 卫星导航仪即可自动定位。 (3)冷启动:安装后第一次启动、所存的历书太陈旧或者所有数据被清除、船位变化 不大于 100 英里或 3 个月(具体参照仪器说明书)以上没有通电接收过卫星信
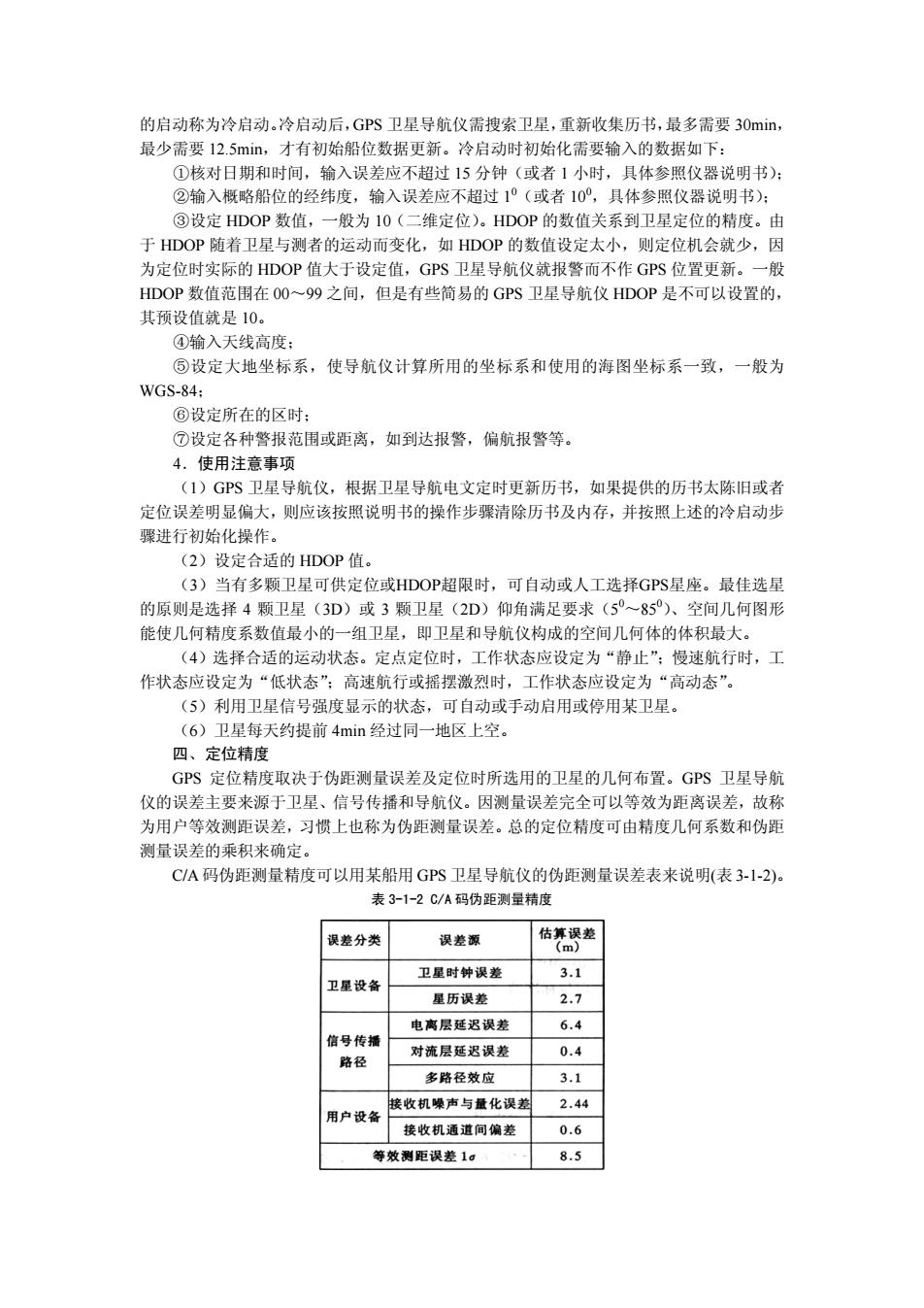
的启动称为冷启动。冷启动后,GPS卫星导航仪需搜索卫星,重新收集历书,最多需要30min, 最少需要125m,才有初始船位数据更新。冷启动时初始化需要输入的数据如下: 个核对日期和时间 输入误差应不超过15分钟(或者1小时,具体参照仪器说明书) ②输入概略船位的经纬度 输入误差应不超过1°(或者 10 具体参照仪 器说明 ③设定HDOP数值,一般为10(二维定位)。HDOP的数值关系到卫星定位的精度。由 于HDOP随者卫星与测者的运动而变化,如HDOP的数值设定太小,则定位机会就少,因 为定位时实际的HDOP值大于设定值,GPS卫星导航仪就报警而不作GPS位置更新。一般 DOP数值范围在O099之间.但是右些简易的GPS卫星导航仪HDOP是不可以设置的. 其预设值就是10 ④输入天线高度: ⑤设定大地坐标系,使导航仪计算所用的坐标系和使用的海图坐标系一致,一般为 WGS-84. ⑥设定所在的区时 (1)GS卫星导航仪,根据卫星导航电文定时更新历书,如果提供的历书太陈旧或者 定位误差明显偏大,则应该按照说明书的操作步骤清除历书及内存,并按照上述的冷启动步 骤进行初始化操作」 2)设定合适的HDOP值 (3) 有多颗卫星可供定位或HDOP超限时 可自动或人工选择GPS星座。最佳选星 的原则是选择4颗卫星(3D)或3颗卫星(2D)仰角满足要求(5一85)、空间几何图形 能使几何精度系数值最小的一组卫星,即卫星和导航仪构成的空间儿何体的体积最大。 (4)选择合适的运动状态。定点定位时,工作状态应设定为“静止”:慢速航行时,工 作状态应设定为“低状态”:高速航行或摇摆烈时,工作状态应设定为“高动态”。 (5)利用卫星信号强度显示的状态, 「自动或手动启用或停用某卫星, (6)卫星每天约提前4min经过同一地区上空。 四、定位精度 GPS定位精度取决于伪距测量误差及定位时所选用的卫星的几何布置。GPS卫星导航 仪的误差主要来源于卫星、信号传播和导航仪。因测量误差完全可以等效为距离误差,故称 为用户等效测距误差,习惯上也称为伪距测量误差。总的定位精度可由精度几何系数和伪距 测量误差的乘积来确定 CA码伪距测量精度可以用某船用GPS卫星导航仪的伪距测量误差表来说明(表3-1-2)。 表3-1-2C/A码伪距测量精度 误差分类 误差源 估算误差 卫星时钟误差 3.1 卫星设 星历误差 2,7 电离层延迟误差 6.4 路名 对流层延迟误艺 0.4 多路径效应 3.1 2.44 用户设备 接收机噪声与量化误刻 接收机通道间偏 0.6 等效测距误差1。 8.5
的启 ); 于 H 为定 系,使导航仪计算所用的坐标系和使用的海图坐标系一致,一般为 WGS 各种警报范围或距离,如到达报警,偏航报警等。 如果提供的历书太陈旧或者 定位 该按照说明书的操作步骤清除历书及内存,并按照上述的冷启动步 骤进 星可供定位或HDOP超限时,可自动或人工选择GPS星座。最佳选星 的原 颗卫星(2D)仰角满足要求(50 ~850 )、空间几何图形 能使 的卫星的几何布置。GPS 卫星导航 卫星、信号传播和导航仪。因测量误差完全可以等效为距离误差,故称 表 3-1-2 C/A 码伪距测量精度 动称为冷启动。冷启动后,GPS 卫星导航仪需搜索卫星,重新收集历书,最多需要 30min, 最少需要 12.5min,才有初始船位数据更新。冷启动时初始化需要输入的数据如下: ①核对日期和时间,输入误差应不超过 15 分钟(或者 1 小时,具体参照仪器说明书); ②输入概略船位的经纬度,输入误差应不超过 10 (或者 100 ,具体参照仪器说明书 ③设定 HDOP 数值,一般为 10(二维定位)。HDOP 的数值关系到卫星定位的精度。由 DOP 随着卫星与测者的运动而变化,如 HDOP 的数值设定太小,则定位机会就少,因 位时实际的 HDOP 值大于设定值,GPS 卫星导航仪就报警而不作 GPS 位置更新。一般 HDOP 数值范围在 00~99 之间,但是有些简易的 GPS 卫星导航仪 HDOP 是不可以设置的, 其预设值就是 10。 ④输入天线高度; ⑤设定大地坐标 -84; ⑥设定所在的区时; ⑦设定 4.使用注意事项 (1)GPS 卫星导航仪,根据卫星导航电文定时更新历书, 误差明显偏大,则应 行初始化操作。 (2)设定合适的 HDOP 值。 (3)当有多颗卫 则是选择 4 颗卫星(3D)或 3 几何精度系数值最小的一组卫星,即卫星和导航仪构成的空间几何体的体积最大。 (4)选择合适的运动状态。定点定位时,工作状态应设定为“静止”;慢速航行时,工 作状态应设定为“低状态”;高速航行或摇摆激烈时,工作状态应设定为“高动态”。 (5)利用卫星信号强度显示的状态,可自动或手动启用或停用某卫星。 (6)卫星每天约提前 4min 经过同一地区上空。 四、定位精度 GPS 定位精度取决于伪距测量误差及定位时所选用 仪的误差主要来源于 为用户等效测距误差,习惯上也称为伪距测量误差。总的定位精度可由精度几何系数和伪距 测量误差的乘积来确定。 C/A 码伪距测量精度可以用某船用 GPS 卫星导航仪的伪距测量误差表来说明(表 3-1-2)
伪距测量主要有以下误差: 1.卫星时钟误差与星历误差 子航电 文中卫星时钟校正系数、星历数据与GS时间基准及卫星真实位省 间的误差就是卫星时钟误差与星历误差。这一误差属系统误差,在同一时刻对各个用户的影 响是一样的。 2.大气层传播延迟 大气层传播延迟,包括电离层传播延迟和对流层传播延迟两部分。 电离层传播延迟是由于电波在高度为46一460km的电离层中传播时,传播速度变化及 传播路径曲折的结果 电离层传播延迟模型比较复杂,与电波频率、太阳黑子的活动情况 因素有关。采用双频测量,可以对电离层传搭延迟进行较精确的校正。采用单频测量的用广 可采用模型校正法进行修正。民用GS卫星导航仪采用8个系数的模型校正法大约可使电 离层传播延迟误差减小一半。 对流层传播延迟是由于电波在近地15km的对流层中传播速度不同于真空中的光速而 引起的 与大气温度、 压力及卫星仰角等因素有关。 卫星仰角小 10时 这项误差迅速增 大。在实际使用中,采取不选用仰角低于5”的卫星和对仰角≥5°的卫星用模型校正法修正 的措施。 电离层传播延迟误差与对流层传播延迟误差对范围不大地区内的用户来说是相近的。 3.其他误差 多路径效应是指用户设备接收到一个以上传播路径的信号,这些信号合成后,使信号特 性变 产生测量误差。这种多路径误差与用户天线位置及反射面自然特性等有关。接收机 噪声和量化误差是接收机硬件和软件处理信号所引起的噪声,会对伪距测量产生误差。量化 误差是数字信号处理所固存的。接收机利用多通道对多颗卫星进行测量时,由于各通道硬件 路径不同.会产生通道间偏差,给伪距测量带来误差。 C/A码伪距测量标准差值在接收机的说明书中往往是给出的。知道伪距测量标准差后 如何来计算定位误差呢 陆标定位中的两距离定位,其定位误差与两物标的夹角有关,也 是说与两物标与测者之间的几何位置有关。显然,GPS卫星导航仪的定位误差也应与用广 及卫星间的几何位置有关。用户与卫星间的几何位置对定位精度的影响可用精度几何因子 (GDOP)来表征。总的定位标准差,可用GDOP与用户等效测距误差的乘积来确定。若用 户等效测距标准差为p,则定位总标准差o为:=G×GDOP 实际使用中还采用以下几种精度系数 三维位置精度因子PDOP(Position DOP) 用户时钟精度因子TDOP(Time DOP): 水平位置结度因子HDOPCHorizontal dop) 垂向高度精度因子VDOP(Vertical DOP), 它们与GDOP之间的关系满足下面两公式 GDOP =(PDOP)+(TDOP) PDOP =(HDOPY +(VDOPY 知道了各精度因子,就可以根据以下公式求得各种定位标准差 O三=G×PDOP: 水平位置=O×HDOP O垂直高度=O×DOP: C用户时钟=O×TDOP
伪距测量主要有以下误差: 1.卫星时钟误差与星历误差 GPS 卫星的导航电文中卫星时钟校正系数、星历数据与 GPS 时间基准及卫星真实位置 间的误差就是卫星时钟误差与星历误差。这一误差属系统误差,在同一时刻对各个用户的影 响是一样的。 2.大气层传播延迟 大气层传播延迟,包括电离层传播延迟和对流层传播延迟两部分。 电离层传播延迟是由于电波在高度为 46~460 km 的电离层中传播时,传播速度变化及 传播路径曲折的结果。电离层传播延迟模型比较复杂,与电波频率、太阳黑子的活动情况等 因素有关。采用双频测量,可以对电离层传播延迟进行较精确的校正。采用单频测量的用户 可采用模型校正法进行修正。民用 GPS 卫星导航仪采用 8 个系数的模型校正法大约可使电 离层 近地 15 km 的对流层中传播速度不同于真空中的光速而 与对流层传播延迟误差对范围不大地区内的用户来说是相近的。 给伪距测量带来误差。 几何位置有关。用户与卫星间的几何位置对定位精度的影响可用精度几何因子 ρ,则定位总标准差 传播延迟误差减小一半。 对流层传播延迟是由于电波在 引起的,与大气温度、压力及卫星仰角等因素有关。卫星仰角小于 10º 时,这项误差迅速增 大。在实际使用中,采取不选用仰角低于 5º 的卫星和对仰角≥5º 的卫星用模型校正法修正 的措施。 电离层传播延迟误差 3.其他误差 多路径效应是指用户设备接收到一个以上传播路径的信号,这些信号合成后,使信号特 性变化,产生测量误差。这种多路径误差与用户天线位置及反射面自然特性等有关。接收机 噪声和量化误差是接收机硬件和软件处理信号所引起的噪声,会对伪距测量产生误差。量化 误差是数字信号处理所固存的。接收机利用多通道对多颗卫星进行测量时,由于各通道硬件 路径不同,会产生通道间偏差, C/A 码伪距测量标准差值在接收机的说明书中往往是给出的。知道伪距测量标准差后, 如何来计算定位误差呢?陆标定位中的两距离定位,其定位误差与两物标的夹角有关,也就 是说与两物标与测者之间的几何位置有关。显然,GPS 卫星导航仪的定位误差也应与用户 及卫星间的 (GDOP)来表征。总的定位标准差,可用 GDOP 与用户等效测距误差的乘积来确定。若用 户等效测距标准差为 σ 总 为:σ 总 = σ ×GDOP 实际使用中还采用以下几种精度系数: 三维位置精度因子 PDOP(Position DOP); 用户时钟精度因子 TDOP(Time DOP); 水平位置精度因子 HDOP(Horizontal DOP); 垂向高度精度因子 VDOP(Vertical DOP)。 它们与 GDOP 之间的关系满足下面两公式: ( )( ) 2 2 GDOP = PDOP + TDOP ( )( ) 2 2 PDOP = HDOP + VDOP 知道了各精度因子,就可以根据以下公式求得各种定位标准差: σ 三维 σ ×= PDOP ; σ 水平位置 = σ × HDOP ; σ 垂直高度 σ ×= VDOP; σ 用户时钟 = σ ×TDOP